 新发明的四翼飞行器可在短时间内不受束缚地飞行
新发明的四翼飞行器可在短时间内不受束缚地飞行

在近日的 Nature 杂志上,由 Robert J. Wood 教授领导的哈佛大学微机器人实验室(Harvard’s Microrobotics Lab)展示了一个四翼版本的 RoboBee 平台,并成功实现无束缚飞行。就外观而言,该飞行器有两大特色:一对额外的翅膀(四翼)和顶部的太阳能电池。它可以在短时间内不受束缚地飞行。
图丨四翼飞行器 RoboBee(来源:哈佛微型机器人实验室)四翼飞行器 RoboBee 长 5 厘米,重 259 毫克。顶部是太阳能电池,底部是驱动电路,它可以把太阳能电池板的电压提高到 200 伏,这一工作电压可使翅膀振动频率达到 200 赫兹。现在的结构,可以避免太阳能电池板受到机翼气流的影响,同时又能让机器人的整体重心保持在机翼所在位置。该飞行器不需要任何控制,对于持续时间不到一秒的非常短的开环飞行,它可以足够稳定。四翼 VS 两翼
2013 年,Robert J. Wood 实验室的一些人,包括当时的博士后 Sawyer Buckminster Fuller,在 Science 杂志上发表了一篇论文,介绍了一种基本上可控的蜜蜂机器人 RoboBee。第一代蜜蜂机器人设计得非常像蜜蜂,由两个蜜蜂翅膀大小的机翼驱动。起初,研究人员认为,蜜蜂可以用两只翅膀做很多事情,那么为什么机器人不能呢?
图丨哈佛大学初代 RoboBee(来源:哈佛微型机器人实验室)从那以后,又出现了好几代蜜蜂型机器人,后来事实证明,两机翼小飞行机器人之所以不能做蜜蜂所做的事情,原因有很多。至少就目前而言,偏航控制等问题就有些棘手,这也是为什么使用四个机翼而不是两个的原因之一。具体来说,研究人员发现很难控制两翼微型机器人的旋转或偏航。相较而言,四个翅膀使得控制三个轴的方向非常简单。通过控制不同速度和振幅的翅膀振动,飞行机器人可以实现偏航、俯仰和翻转。当正常翅膀振动的频率保持在 160 赫兹左右。在一个方向上减小机翼振幅,然后在另一个方向增大振幅,这样可以保持频率不变,但实现偏航。
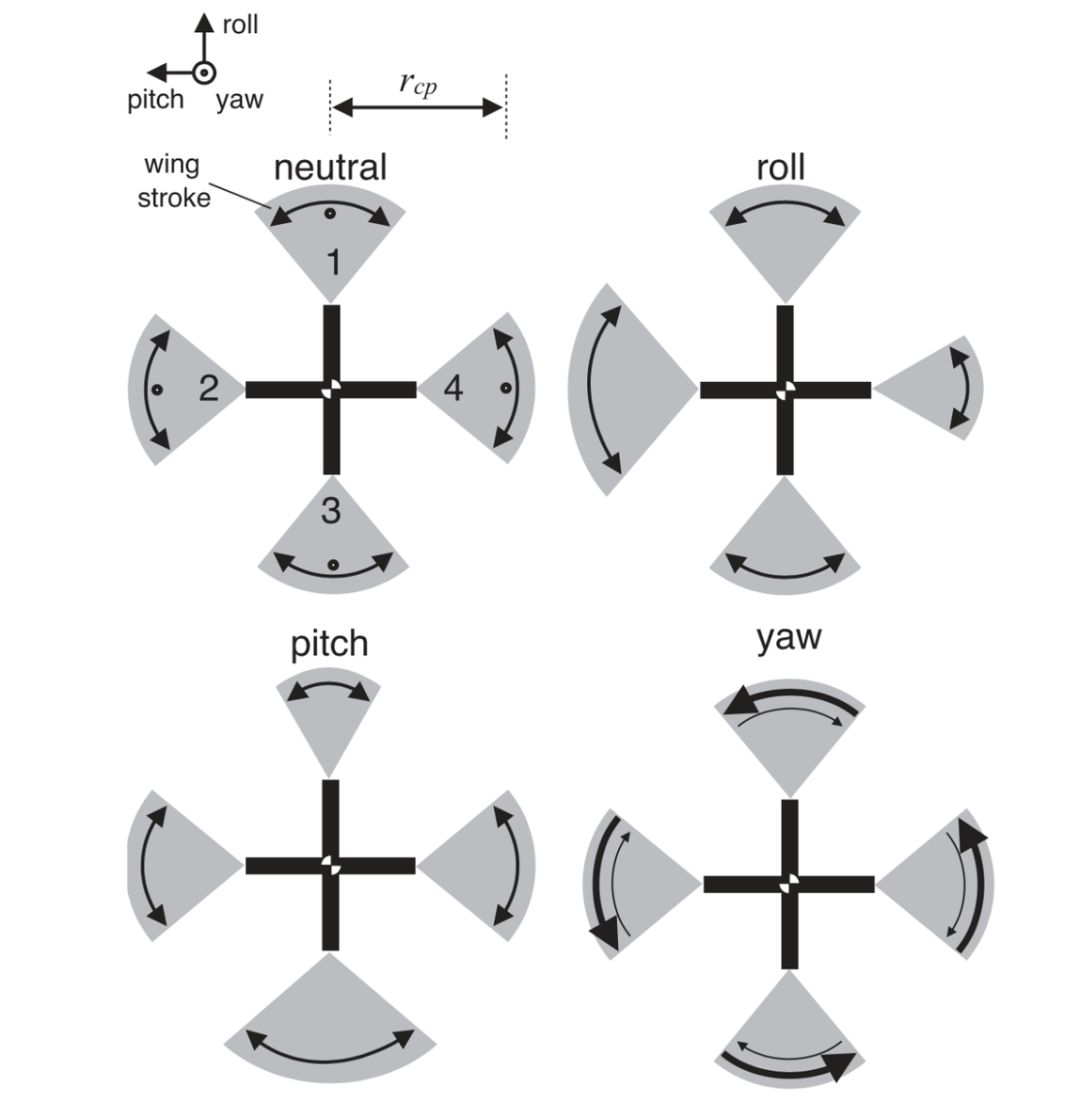
(来源:华盛顿大学)在四翼机器人的设计中,横(x)轴和纵(y)轴转向是通过改变相对机翼的振幅来实现的;驱动竖(z)轴(“转向”)是通过改变相对于另一个方向的速度来实现的。压力中心的近似位置用左上角的一个点表示;它到机器人质心的距离由 rcp 给出,箭头表示四个翅膀每一个的近似振幅值。今年,在机器人领域顶级会议 ICRA 也有一些令人印象深刻的研究,它们表明用两个翅膀控制偏航也是可能的。但是,这么小的微型机器人,尤其是飞行机器人,还有一个问题是电池能量储存。飞行器需要大量的动力起飞,并在空中飞行,这意味着需要一个相对大的电池提供较长时间的电力,这会让飞行器更重。这就是四翼飞行机器人的另一个优势了,额外的翅膀意味着有更大的力量,可携带更多的东西。而且,有了更大的举升力,就有了携带控制单元的能力,也就有可能实现一只完全独立的飞行机器人。当然,它看起来可能会有点怪异。太阳能驱动 VS 激光驱动
需要指出的是,这并不是我们所见过的第一个能自主飞行的有翼飞行机器人。去年在 ICRA,西雅图华盛顿大学的一个小组展示了一个两翼机器人,当激光对准它的光感电池时,它就能起飞。2018 年,在澳大利亚布里斯班举行的IEEE机器人与自动化国际会议上,来自华盛顿大学的机器人专家展示了两翼机器人 RoboFly,这是一个昆虫大小的激光驱动扑翼机器人,它进行了第一次(非常短暂的)不受约束的飞行。
(来源:华盛顿大学)RoboFly 是基于哈佛大学微型机器人实验室的微型机器人 RoboBee 而设计的,大小和大黄蜂差不多,重量只有 190 毫克(比牙签重一些)。它由一束红外激光提供动力,当激光射中飞行器顶部很小的光伏电池时,它就可以收集到让飞行器升空所需的 250 毫瓦能量。当时,激光没有跟踪机器人,只要光伏电池离开光束,它就会失去动力,机器人就会停止飞行。研究人员设想,最终飞行器可以由安装在天花板上的激光控制,无论它走到哪里,激光都可以跟踪它,甚至可以安装在移动的车辆(或其他机器人)上,无限期地为它提供动力。
(来源:华盛顿大学)哈佛研究人员表示,他们新 RoboBee 飞行机器人是“持续飞行”而不仅仅是“升空”,在某种程度上这是开放的解释,毕竟飞行时间都很短暂。新四翼 RoboBee 使用太阳能电池的原因是,飞行机器人无法举起为翅膀提供动力的电池,因此必须使用舷外动力。没有人想用导线来给飞行器供电,那就意味着要选择某种无线电源。华盛顿大学团队使用了激光,哈佛大学的新 RoboBee 使用了太阳能。实际上,要让新 RoboBee 飞起来,一个太阳还不够,可能需要“三个太阳”的照射强度,研究人员用一些强光灯实现了飞行过程。这意味着四翼 RoboBee 还不能用于户外操作。研究人员表示,他们正在进行的下一步工作是一个比四翼 RoboBee 大 25% 的版本,它应该会把所需“太阳”的数量减少到 1.5 个,这意味着它也许可以在金星之类的地方工作。在目前的版本中,四翼 RoboBee 确实为传感器之类的东西留下了一些重量预算,但听起来,研究人员主要关注的是将电力需求降低到正常光照以下。在四翼 RoboBee 真正实现自主飞行之前,还需要进行一些设计优化和额外的集成工作。目前,自主飞行机器人正是朝着这个目标前进
-
机器人
+关注
关注
214文章
31582浏览量
224157 -
飞行器
+关注
关注
13文章
853浏览量
47914
原文标题:摆脱电线,太阳能驱动微机器人无束缚飞行
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Flymaple V1.1:高性能四轴飞行器控制器板

分布式推进垂直起降飞行器过渡走廊参数敏感性分析与总体设计优化导向研究

芯片电感/半导体模组磁性元器件在低空飞行器领域的应用范围及其作用
简仪科技产品在低空飞行器风洞试验数据采集设备中的应用

KYOCERA AVX EM系列多层陶瓷电容器:非飞行原型设计的理想之选
低空飞行器(如eVTOL、物流无人机、城市空中交通飞行器)的适航认证

mcu短时间内发生多次中断,如何解决中断丢失问题呢?
第四届飞行器健康管理技术国际高端论坛暨青年科学家论坛:昊衡科技,欢迎您来!

四轴无人机是如何工作的?

深圳反重力科技纯电动单人智能飞行器完成首次试飞
广汽高域复合翼飞行汽车GOVY AirJet正式获颁特许飞行证 无人驾驶航空器特许飞行证




评论