 安创加速团队宇树科技打造四足机器人,欲成中国“波士顿动力”!
安创加速团队宇树科技打造四足机器人,欲成中国“波士顿动力”!

国产四足机器人Laikago可以在不平坦的表面上移动并在受到撞击时保持平衡;可在20°的坡度自由行走;可以折叠放入行李箱中,能在平地、草地、石子地等多种不同路面情况下稳定行走。
整机拥有12个高性能电机,总瞬时最大功率18KW,功率质量密度0.8KW/kg,比一般超跑(0.45KW/kg)高出近一倍,最大步行速度能够达到2.88公里/小时。运动时机身3轴力控制正向最大拉力≥25N(可编程提升)。
Laikago已经在2017年实现商用,可在官网上进行预订。目前在售的Laikago机器人共有2个型号:Laikago、Laikago Pro;停售的有1个型号:Laikago(开发者)。
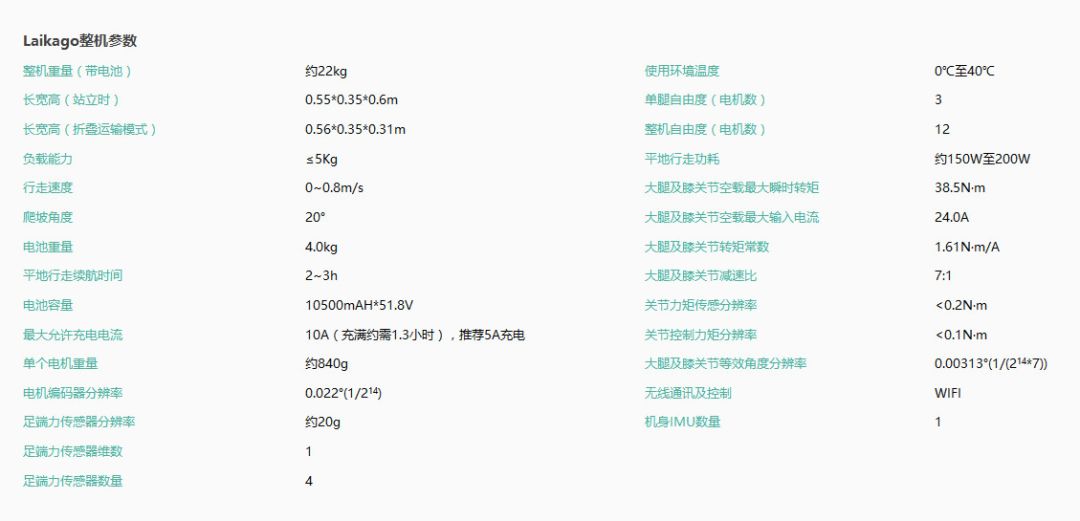
Laikago参数
Laikago开发者版参数
Laikago Pro版参数
目前官网上只有“预约购买”一种购买方式,有意向购买者可以留下联系方式等待对方联系。虽然官网没有透露价格,但据SlashGear在2017年的报道,当时的售价在20000-30000美元,主要出售给高校、科技馆、科技公司以及展馆等客户。
根据官方数据显示,Laikago重量仅有22kg,而波士顿动力的SpotMini不加手臂重量为25kg,加上手臂重量30kg。Laikago完全自带电池一次充电就可支持2-3小时的行走,而SpotMini充电一次最多可运行1个半小时。
Laikago由安创加速团队宇树科技制造并销售,它的前身是XDog。创始人王兴兴在上海大学读机械工程硕士期间看到了波士顿动力BigDog的报道,在获得了导师的同意后,做出了第一款小型四足机器人并取名为“XDog”,并凭借这款机器人在当年的上海机器人设计比赛中获奖。
2017年王兴兴在XDog的基础上,推出了重构的四足机器人Laikago。Laikago名字源于第一个被送上太空的生物,一只叫做Laika的狗。王兴兴认为,Laikago遵循结构简单、加工方便、功能可靠的设计原则,因此可能不少人会觉得这款机器人设计感不强,看起来不够精致。
Laikago虽然看起来好像跟波士顿动力的机器狗没什么区别,但是两者的理念有着本质的不同。
波士顿动力的重点是在前沿技术上不断突破,所制造的机器人巨大、昂贵,一亮相就惊艳全场;相比而言,Laikago结构更简单、体积更小,并且价格便宜。王兴兴希望在未来,四足机器人能像智能手机和无人机一样普遍。
-
安创加速器
+关注
关注
0文章
9浏览量
4900 -
波士顿动力
+关注
关注
3文章
178浏览量
14061 -
宇树科技
+关注
关注
1文章
58浏览量
930
原文标题:安创加速团队宇树科技打造四足机器人,欲成中国“波士顿动力”!
文章出处:【微信号:ARMaccelerator,微信公众号:安创空间ARMaccelerator】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
引爆机器人赛道!和特斯拉Optimus掰手腕,宇树H2炸场登场

宇树科技,IPO申请获受理


宇树科技2025人形机器人出货量超5500台,领跑行业量产
普渡D5在全球首个机器人登高挑战赛中斩获轮式四足机器人组冠军

宇树科技发布H2仿生人形机器人
Meta重磅入局人形机器人,目标打造“机器人界的安卓系统”
机器人看点:宇树新专利可提升机器人表演效果 蔚来资本入股具身智能公司原力灵机 美信科技新设机器人制
宜科MVT阀岛在宇树科技人形机器人中的应用
全国首届人形机器人线缆技术研讨会圆满召开!
成都汇阳投资关于智元与宇树拿下 1.24 亿订单,人形机器人商业化加速
年出货约2万台!中国厂商主导全球四足机器人市场
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI




评论