 瑞士研究员发明的一款对话机器人,协助实现跨物种交流!
瑞士研究员发明的一款对话机器人,协助实现跨物种交流!

Science Robotics发表一篇由瑞士研究员发明的一款对话机器人,它能够使鱼和蜜蜂这两种几乎不可能“见面”的物种进行交流。研究结果表明,在多个物种的生物混合体中生成并控制行为模式是可行的,为新的人工集体智慧打开了大门。
没错!鱼和蜜蜂“打个电话”就能交流!
近日,瑞士研究员发明了一种对话机器人,可以让鱼和蜜蜂这两种几乎不会相见的物种无障碍的进行交流。
简单来说,就是在相隔700公里的鱼群和蜂群中,分别放置一个“电话”(机器人),两个机器人分别收集来自鱼群和蜂群的信号,而后将接收到的信号转换成对方物种能够“听得懂的话”。
研究结果表明,在多个物种的生物混合体中生成并控制行为模式是可行的。
这项研究发表在了最新一期ScienceRobotics杂志上:
论文地址:
http://robotics.sciencemag.org/content/4/28/eaau7897
不同机器人系统和动物物种之间的这种种间联系可能为新的人工集体智慧打开了大门,其中动物及其大脑无与伦比的感知能力可用于增强自主决策。
未来或许能够产生重新改造“生态系统”的新应用。
相隔700公里,鱼和蜜蜂的“同声传译”
过去,研究人员曾经分析了多种类型的群居动物的自组织的集体行为。这种集体智慧源于个体之间的协同作用,这种协同作用会随着时间和空间上的不同而变化,没有全局性的统一规则。
最近,研究人员开发出的机器人可以与动物群体合作,更好地了解群居动物的集体决策过程。这种混合生物系统的诞生,让人工系统和动物之间的实现合作关系成为可能,最终可能在混合组织中产生新的能力。
研究人员设计了能够融入动物群体并影响它们行为的机器人。他们已经在蟑螂、小鸡和鱼群中测试了他们的机器人——其中一个“间谍”机器人能够潜入圆形水族馆的鱼群中,让它们朝着给定的方向游动。
在这项研究中,工程师们进行了鱼类实验,并更进一步:
将机器人和鱼群与奥地利格拉茨实验室的一群蜜蜂连接起来;
蜜蜂生活在一个操作台上,每侧都有机器人终端,它们会自然地聚集在一起。
每组动物中的机器人都发出特定于该物种的信号。
鱼群中的机器人发出两种信号,一种是视觉信号,如不同的形状、颜色和条纹;另一种是行为信号,如加速度、振动和尾巴运动。
蜂群中的机器人主要以振动、温度变化和空气运动的形式发出信号。
两组动物都对这些信号有反应;鱼开始沿着信号指定的方向游动,蜜蜂开始朝着其中一个终端聚集。两组中的机器人记录下每组的动态,并交换这些信息,然后将接收到的信息转换成对应物种的信号。
“这些机器人的行为就好像它们是国际会议上的谈判代表和口译员。通过交流各种信息,两组动物逐渐达成了一致的决定。”BioRob教授Francesco Mondada说。
在实验过程中,这两种动物可以彼此“对话”,尽管它们相距约700公里。“对话”一开始很混乱,但最终实现了一定程度的协调。25分钟后,两组动物同步了——所有的鱼都以逆时针方向游动,所有的蜜蜂都往其中一个终端机器人周围聚集。
实验一开始很混乱(上图),但最终实现了一定程度的协调(下图)
这些物种甚至开始采用彼此的一些特征。蜜蜂变得比平时更焦躁不安,也不太像往常那样成群结队,而鱼也开始比往常更多地聚集在一起。
这项研究的发现可以帮助机器人工程师开发出一种有效的方法,让机器捕捉并翻译生物信号。
对于生物学家来说,这项研究可以让他们更好地理解动物行为以及生态系统中的个体是如何相互作用的。
研究和实验设置
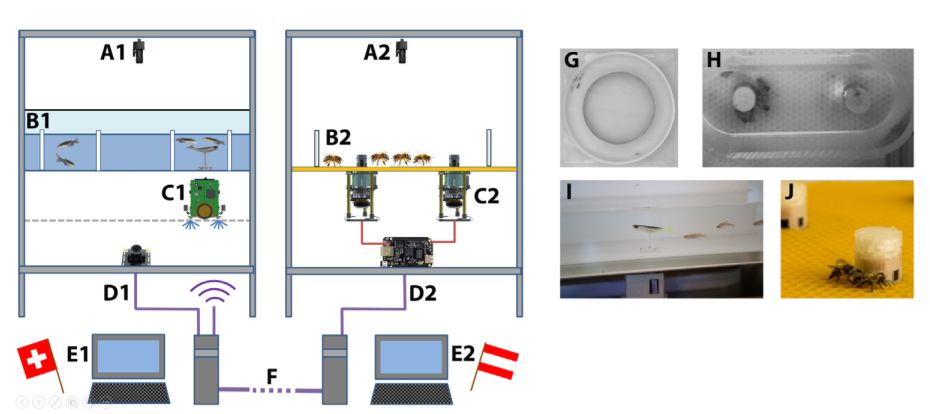
上图所示为由两种动物物种(斑马鱼和蜜蜂)和两种人工装置(鱼和蜜蜂机器人)组成的种间实验的自动化设置,由金属框架和相机(A1和A2)组成,以高清晰度捕捉场景。斑马鱼场景(B1)包括一个装满水的水箱和一个圆形走廊(G)。这个空间限制了斑马鱼和诱饵,呈现一种二选一的场景:“生物混合系统”可以按顺时针或逆时针方向移动(图中G和I)。在tank(C1)下方,一个轮式机器人正在移动,它也通过磁耦合移动诱饵。
而蜜蜂则被放置涂有硅油层的有机玻璃场景(B2)中,带有两个机器人,形成了二元选择。每个固定机器人的“头部”包含六个IR传感器(J)。主体安装在场景地板(C2)下方,包括一个Peltier元件,以调节场内的局部温度。这两个场景与通过接口(D1和D2)与计算机(E1和E2)连接,机器人的活动通过这些计算机上的程序进行闭环控制。由此实现了斑马鱼场景(瑞士洛桑)和蜜蜂场景(位于奥地利)之间的交互和联系。
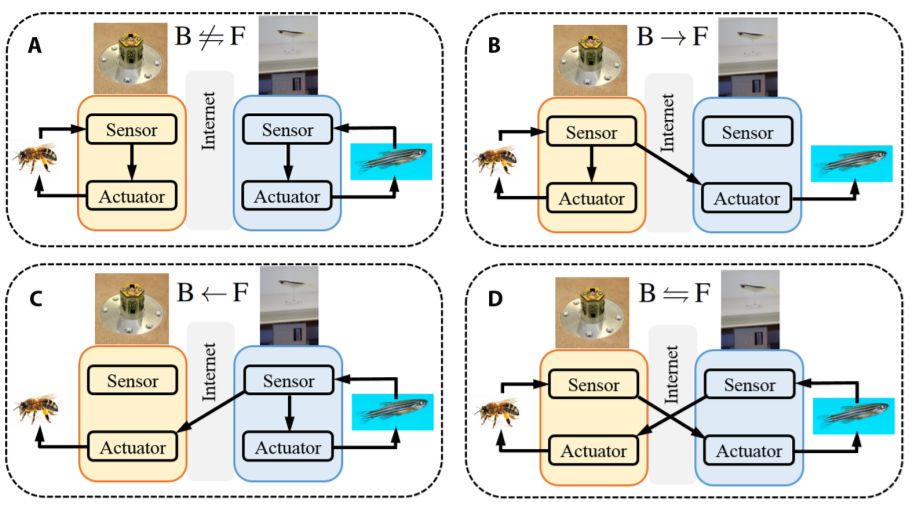
上图所示为测试蜜蜂和斑马鱼实验装置之间互联性的四个条件。(A)对照条件,机器人在闭环中与动物交互,但在场景设置间不交换信息。(B)条件B→F,鱼-机器人的行为根据蜜蜂-机器人感知到的内容进行调制,蜜蜂-机器人混合体在独立的决策动态中与蜜蜂在闭环中交互。(C)条件B←F,蜜蜂-机器人混合体的行为根据鱼-机器人混合体所感知的信息调制,鱼-机器人混合体在独立动态决策环境中与鱼在闭环中实现交互。(D)条件B⇌F,蜜蜂-机器人的行为根据鱼-机器人的感知进行调制,鱼-机器人的行为根据蜜蜂-机器人的感知来调制。D设置建立起了两个生物混合系统之间的长距离闭环交互,可以实现分享集体决策,以产生全局性的共识。

图3 混合生物系统间的共同集体决策

图4. 传递熵(TE)的测量,这是一种有向信息理论量度,可用于表示复杂系统中各方之间的依赖关系
此外,这项研究还可以用来开发利用动物特殊的感官能力来监测自然栖息地的方法。例如,机器可以引导鸟类避开机场或类似的危险地方,或者引导传粉昆虫朝向有机作物,远离使用杀虫剂的作物。
-
机器人
+关注
关注
213文章
31523浏览量
223921 -
生态系统
+关注
关注
0文章
711浏览量
21617
原文标题:蜜蜂和鱼700公里隔空“对话”,Science子刊:机器人协助实现跨物种交流!
文章出处:【微信号:AI_era,微信公众号:新智元】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
保隆科技拜访中科大机器人研究院参观交流
智能AI机器人定制开发_AI陪伴对话机器人主板方案

AI机器人方案_ai人机对话机器人PCBA硬件定制开发
导远科技核心成果亮相2025瑞士机器人展
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
最新发布!泰科机器人发布首款自研双足人形机器人

工业机器人的特点
工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
轮式移动机器人电机驱动系统的研究与开发
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信




评论