 Apollo代码学习—MPC与LQR比较
Apollo代码学习—MPC与LQR比较

LQR (线性二次调解器)理论是现代控制理论中发展最早也最为成熟的一种状态空间设计法。特别可贵的是,LQR可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。
LQR 最优设计是指设计出的状态反馈控制器 K 要使二次型目标函数 J 取最小值,而 K 由权矩阵 Q 与 R 唯一决定,故此 Q、R 的选择尤为重要。
MPC(模型预测控制)是一种先进的过程控制方法,在满足一定约束条件的前提下,被用来实现过程控制,它的实现依赖于过程的动态模型(通常为线性模型)。
在控制时域(一段有限时间)内,它主要针对当前时刻进行优化,但也考虑未来时刻,求取当前时刻的最优控制解,然后反复优化,从而实现整个时域的优化求解。
本文由社区开发者——吕伊鹏撰写,对MPC与LQR进行了较为详细的比较,希望这篇文给感兴趣的同学带来更多帮助。
Apollo中用到了PID、MPC和LQR三种控制器,其中,MPC和LQR控制器在状态方程的形式、状态变量的形式、目标函数的形式等有诸多相似之处,因此结合自己目前了解到的信息,将两者进行一定的比较。
MPC(Model Predictive Control,模型预测控制)和LQR(Linear–Quadratic Regulator,线性二次调解器) 在状态方程、控制实现等方面,有很多相似之处,但也有很多不同之处,如工作时域、最优解等,基于各自的理论基础,从研究对象、状态方程、目标函数、求解方法等方面,对MPC和LQR做简要对比分析。
本文主要参考内容:
【1】龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制[M].北京理工大学出版社, 2014.
【2】Model predictive control-Wikipedia.
【3】Linear–quadratic regulator-Wikipedia.
【4】Inverted Pendulum: State-Space Methods for Controller Design.
【5】王金城. 现代控制理论[M]. 化学工业出版社, 2007。
LQR的研究对象是现代控制理论中以状态空间方程形式给出的线性系统。MPC的研究对象可以是线性系统,也可以是非线性系统,只不过为了某些需求,如时效性,计算的便捷,操控性等,一般会将非线性系统转换为线性系统进行计算。非线性系统的线性化可参考上一篇文章。
Apollo中,LQR和MPC控制器都选用的单车动力学模型作为研究对象,单车动力学模型为非线性系统,但LQR和MPC控制器的目的是为了求最优控制解,在具体的优化求解时,均通过线性化方法将状态方程转化为线性方程进行求解,所以,可以说Apollo中LQR和MPC控制器的研究对象均为线性系统。
LQR的状态方程多以微分方程的形式给出,如:

是一个连续线性系统,在计算过程中需要转换为如公式3的离散线性系统。
MPC的状态方程可以为线性系统,可以为非线性系统,非线性系统形如下:

线性系统如公式3所示:

但LQR和MPC在计算求解时基本都是基于离散线性方程计算的。公式1可以很方便的转化为公式3的形式。
按照维基百科的说法:

LQR在一个固定的时域上求解,且一个时域内只有一个最优解,而MPC在一个逐渐消减的时域内(in a receding time window)求解最优解,且最优解经常更新。
可以结合MPC的滚动优化,以及图1进行理解:
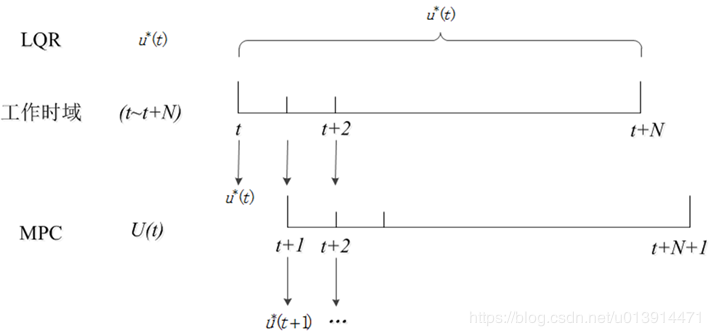
图1 MPC和LQR的工作时域
针对同一工作时域[t,t+N],LQR在该时域中,有唯一最优控制解u∗(t),而MPC仅在t时刻有最优解u∗(t),但它会计算出一个控制序列U(t) ,并仅将序列的第一个值u∗(t)作为控制量输出给控制系统,然后在下一采样时间结合车辆当前状况求取下一个最优控制解u∗(t+1),这就是MPC所谓的滚动优化。
这么做的目的是为了使控制效果在一定时间内可期,并且能根据控制效果尽早调整控制变量,使实际状态更切合期望状态。
此外,LQR的工作时域可以拓展到无限大,即可以求取无限时域的最优控制解。而MPC只针对有限时域。
优化求解问题一般离不开目标函数的设计。
LQR的目标函数的一般形式为:

其中, 终端状态,
终端状态,
正定的终端加权矩阵,x为状态变量,多为各种误差,u为控制变量,Q为半正定的状态加权矩阵,R为正定的控制加权矩阵,实际应用中,Q、R多为对角矩阵。
MPC的目标函数的一般形式为:

其中,
从形式上可以看出,LQR的目标函数为积分形式,MPC的目标函数为求和形式,但其实都是对代价的累计。
两者第一部分均为终端代价函数,当系统对终端状态要求极严的情况下才添加,一般情况下可省略。
 跟踪代价,表示跟踪过程中误差的大小,
跟踪代价,表示跟踪过程中误差的大小, 控制代价,表示对控制的约束或要求等。
控制代价,表示对控制的约束或要求等。
正如工作时域所述,针对同一工作时域,LQR有唯一最优控制解,也就是在该控制周期内,LQR只进行一次计算。
而MPC滚动优化的思想,使其给出该时域内的一组控制序列对应不同的采样时刻(采样周期和控制周期不一定相同),但是只将该序列的第一个值输出给被控系统,作为该时刻的最优控制解。
因此,对于工作时域[t,t+N],LQR只有唯一解,对于线性MPC,本质是凸优化问题,只有唯一解;但非线性MPC,可能会有N个local optimal。
最优控制解的求取多基于目标函数进行,取线性约束下的目标函数的极值为最优控制解。对于系统为线性,目标函数为状态变量和控制变量的二次型函数的线性二次性问题,最优解具有统一的解析表达式。
Apollo中的MPC将优化问题转化为二次规划问题,利用二次规划求解器进行求解。横向控制中用的是LQR调节器,它通过假设控制量u(t)不受约束,利用变分法求解。
此外,LQR对整个时域进行优化求解,且求解过程中假设控制量不受约束,但是实际情况下,控制量是有约束的。
而MPC通常在比整个时域更小的时间窗口中解决优化问题,因此可能获得次优解,且对线性不作任何假设,它能够处理硬约束以及非线性系统偏离其线性化工作点的迁移,这两者都是MPC的缺点。
-
线性系统
+关注
关注
0文章
43浏览量
15167 -
Apollo
+关注
关注
5文章
351浏览量
19770 -
LQR
+关注
关注
1文章
6浏览量
3332
原文标题:开发者说 | Apollo代码学习—MPC与LQR比较
文章出处:【微信号:Apollo_Developers,微信公众号:Apollo开发者社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
LQR线性二次调制系统的记录
如何对Apollo2.5 CANBUS进行全面调试?
Apollo Heritage版音频接口附带的插件
MPC8240与MPC106的性能比较
MPC8240与MPC106的性能比较

LQR控制算法之最优控制

Matlab/yalmip工具编写自动驾驶模型预测控制(MPC)代码




评论