 雷洪钧:汽车自动驾驶技术与实例的研究(下)
雷洪钧:汽车自动驾驶技术与实例的研究(下)

汽车自动驾驶系统(Motor Vehicle Auto Driving System),是一种通过车载电脑系统实现无人驾驶的智能汽车系统,又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,还有称自动驾驶汽车(Autonomous vehicles;Self-pilotingautomobile)的。汽车自动驾驶系统,其结构,一般分为:感知系统、决策系统、执行系统3个部分。
2.0 自动驾驶的决策系统
自动驾驶决策系统负责路线规划和实时导航。规划和实时导航不仅高精度数字地图,还要V2X通信网络技术的支持。
2.1自动驾驶的操作系统
(a)操作系统,它是支持电脑基础运作的软件,例如任务安排、执行应用程序以及控制外部设备;(b)自动驾驶的操作系统要统一协调安排自动驾驶汽车的硬件各种雷达、摄像头、声呐等传感器等硬件,组织成一个整体系统;(c)自动驾驶的操作系统必须内置高级的人工智能,引导自动驾驶的人工智能操作系统;(d)自动驾驶汽车的操作系统必须绝对安全可靠,即支持汽车的基础功能和高级功能,并对接受的到数据实时回馈;(e)自动驾驶必需要求非常严苛的操作系统,必须知道现在汽车在哪里,知道周围有什么,能预期接下来会发生什么并做出怎样的应对反应;(f)无论是从复杂程度还是从监控广度上,自动驾驶的操作系统,都应该优于电脑或者智能手机的操作系统
(a)ARM嵌入式Linux操作系统。ARM-Linux程序的开发,主要分为三类:应用程序开发、驱动程序开发、系统内核开发,针对不同种类的软件开发,有其不同的特点。(b)自动驾驶汽车的操作系统三大核心能力:实时反馈、完全的可靠性,以及赶超人类的感知能力。管理自动驾驶汽车的操作系统在监控支配汽车时的反应必须精确到微秒级。
2.3自动驾驶处理器(芯片)
英伟达最新自动驾驶处理器,每秒30 万亿次运算,功率仅30瓦。图片显示的接口是支持的雷达、传感器、摄像头的。
图15 Xavier芯片板
2.4算法
预估模型(见图16)不同速度条件下的适应性算法,车辆当前航向角与航向变化预估量之和作为航向反馈量,期望航向与航向反馈量的差值则作为经典 PID 控制器的输入偏差计算期望前轮偏角δ。
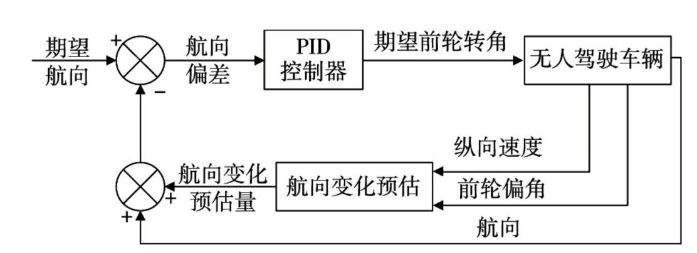
图16 轨迹跟踪算法预估模型
预估模型是电动转向器控制的基本理论依据。
3.0自动驾驶的执行系统
执行系统也是底层控制系统,负责执行汽车的刹车、加速、转向的具体操作。工程师们通过特制的“线控装置”控制方向盘和油门,取代人类司机的手和脚。
3.1线控装置
线控是的机电行业特定短语,是机电控制的一种物理控制方式。线控系统是用电空系统替代机械系统或者液压系统。主要是指信号发生器与信号接收器之间的连接方式是通过线缆或其他动作传到物体进行连接的。
简单地说,自动驾驶汽车的线控执行,主要包括线控转向、油门和制动。最难的部分是线控执行中的制动。
(1)线控转向系统
线控转向系统(Steer By Wire,SBW)去掉了转向盘和转向轮之间的机械连接,具有操纵性、稳定性能更优的特点,且作为主动转向干预的一种方式。SBW系统结构如下图(16),主要分为三个部分:
(a)转向盘系统,包括转向盘、转矩传感器、转向角传感器、转矩反馈电动机和机械传动装置;(b)电子控制系统,包括车速传感器,也可以增加横摆角速度传感器、加速度传感器和电子控制单元以提高车辆的操纵稳定性;(c)转向系统,包括角位移传感器、转向电动机、齿轮齿条转向机构和其他机械转向装置等。
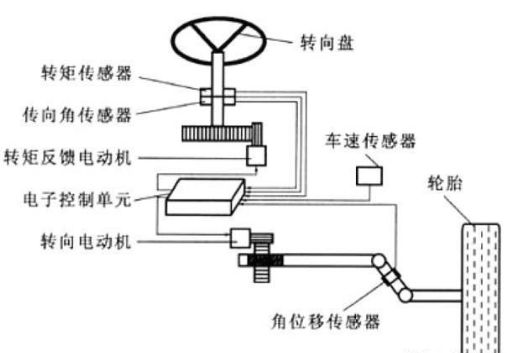
图17 线控转向系统(Steer By Wire,SBW)结构
(2)电助力转向系统
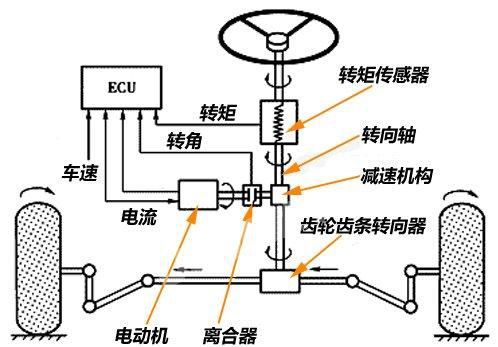
图18 接触式EPS电动助力转向总成及原理
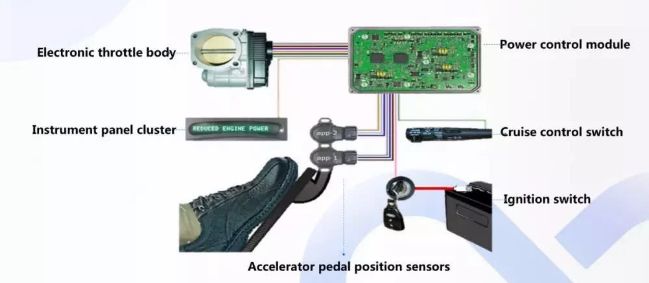
(3)线控油门系统
(a)线控油门系统的优点控制灵敏、精确,发动机能根据汽车的各种行驶信息精确地调节空燃比,改善发动机的燃烧状况,提高动力性和燃油经济性。还可与油压、温度和废气再循环电子信号结合,减少废气排放。减少机械组合零部件,相应减轻机械结构的重量,降低机械零部件的维修几率。(b)线控油门系统组成线控油门主要由油门踏板、踏板位移传感器、电控单元(ECU)、数据总线、电机和油门执行机构组成。(c)线控油门系统工作原理位移传感器安装在油门踏板内部,随时监测油门踏板的位置,随时监测油门踏板位置,当监测到油门踏板高度位置发生变化时,会瞬间将此信息传送至伺服电机,由伺服电机驱动油门执行机构实行油门控制。
(4)线控制动系统主动安全的线控制动功能(Brake by wire),是电子控制单元及传感器组成的系统,目前有:
(a)电子辅助制动系统(EBA);(b)适应巡航系统(ACC);(c)停-走系统(SMS);(d)电子稳定性控制系统(ESC);(e)主动避撞系统(ABC);(f)坡路防退系统(HHS);(g)电子驻车系统(EBC);(h)自动泊车系统(ASC);
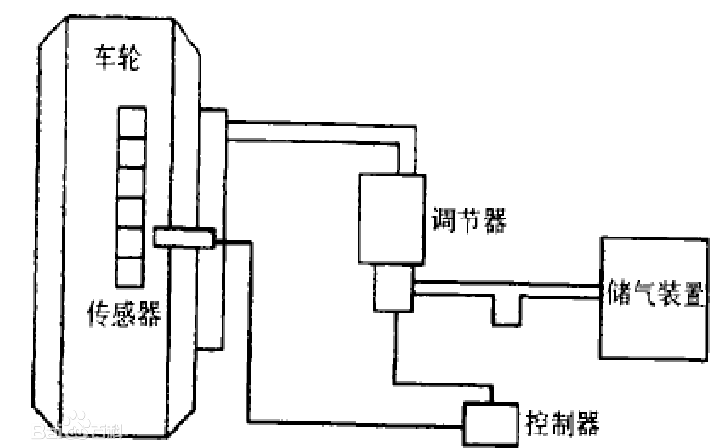
图19 制动防抱死系统(ABS)原理图
(5)CAN总线协议
(a)CAN(Controller Area Network):即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。CAN是德国的Bosch公司开发的(和Intel)。(理解:通过CAN控制器能把多个微处理器(CPU)组成一个局域网,即控制器局域网。(b)CAN优点:使得它能够被广泛的应用。比如:传输速度最高到1Mbps,通信距离最远到10km,无损位仲裁机制,多主结构。CAN控制器价格越来越低,很多MCU也集成了CAN控制器。现在每一辆汽车上都装有CAN总线。(c))CAN应用场景

图20 CAN应用场景
(d)CAN总线分类CAN总线分为高速CAN总线 低速CAN总线。在汽车上,高速信号是用于传输ABS、ESP、TCU等电子控制系统,这些系统需要实时的信号处理,所以用的是高速的CAN信号;而例如车灯等基础设备则不需要高速的实施环境,所以用的是低速的CAN信号。
4.0通信系统
4.1 V2X通信网络技术
V2X 是指车对外界的信息交换,是一系列车载通讯技术的总称。V2X包含汽车对汽车V2V)、汽车对路侧设备(V2R)、汽车对基础设施(V2I)、汽车对行人(V2P)、汽车对机车(V2M)及汽车对公交车(V2T)等六大类。V2X是分为:
图21 V2X(车对万物)通讯模式
(a)基于网络的通讯模式,即车对网络V2N(车对网络),比如通过互联网通信;(b)直接通讯模式,涵盖了车对车V2V(车对车)、车对基础设施V2I(车对基础设施)以及车对人V2P(车对人),比如通过5G 通信,射频识别技术(英文:RadioFrequencyIDentification,缩写:RFID)是一种无线通信技术,见图21)。
图22 射频识别技术用于汽车管理
(c)两种传输模式是互补的(见图22)。
简单的来说,V2V是一种比较自动驾驶更高级的技术。自动驾驶可以实现自动跟车,可以探测前方200米左右交通情况,并作相应的汽车辅助动作,如自动驾速度,自动刹车,但是它无法遇见前方的前方车什么状态,是不是出了意外,这些要求有V2V的技术支持。
4.2电子电器架构
简单来说,汽车电子电气架构就是汽车内部各类通信线路、电子控制新芯片、以及现代导航系统、汽车智能网络构成的电气系统。电子电气架构(Electrical/Electronic Architecture),,是由德尔福公司提出的,集合汽车的电子电气系统原理设计、中央电器盒的设计、连接器的设计、电子电气分配系统等设计为一体的整车电子电气解决方案的概念。
通过EEA的设计,可将动力总成、驱动信息、娱乐信息等车身信息转化为实际的电源分配的物理布局、信号网络、数据网络、诊断、容错、能量管理等的电子电气解决方案。优化汽车电子电气架构设计,可在有效完善汽车综合性能的同时,控制降低汽车总重量和生产成本,对于现代汽车制造业的进一步发展,具有重要的现实意义。
4.3安全解决方案
自动驾驶车辆安全主要是指,包含安全设计和安全运行两大主要内容,其中细分为操作安全、环境安全、行为安全、功能安全、质量安全、机制安全和安全进化七大内容。
4.4云平台
(1)云端主要提供两大功能,包括分布式计算和分布式存储。云平台的第一个应用就是仿真,如图23所示。
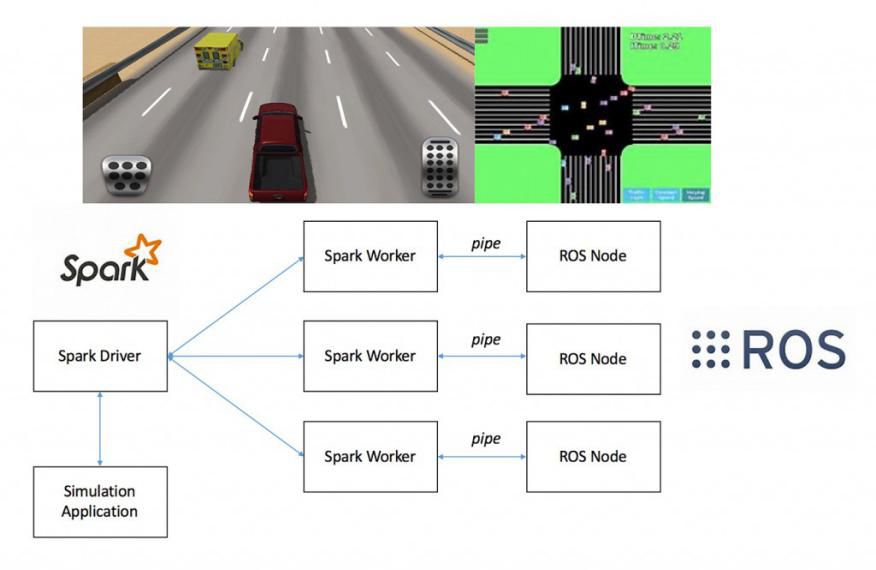
图23 云平台仿真
(2)高清晰度地图生成
如图24所示,高清晰度地图的生成是一个复杂的过程,涉及到很多步骤。包括原始数据处理,点云生成,点云对齐,2维反射地图生成,高精度地图标记以及最终地图生成。
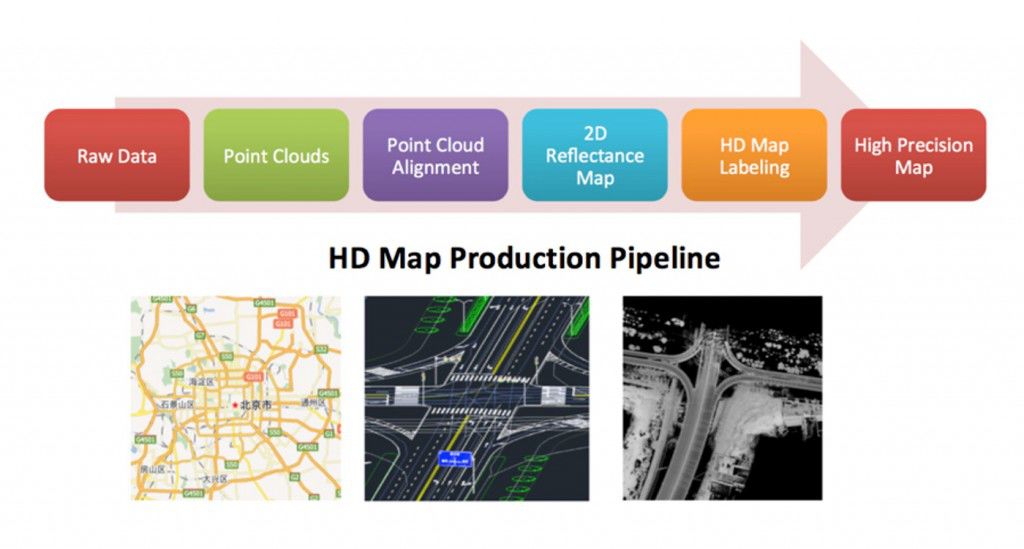
图24 高清晰度地图生成过程
(3)深度学习模型训练
自主驾驶使用了多种不同的深度学习模型,所以要持续更新模型来保证它们的有效性和高效性。由于原始数据的量非常的大,仅靠单机是很难快速地完成模型的训练的,必须开发高可扩展的分布式深度学习系统。二、自动驾驶车辆车辆实例
1.自动驾驶汽车硬件系统
自动驾驶的硬件系统,可以粗略地分为感知、决策、控制三部分(还有定位、地图、预测等模块)。

图25 自动驾驶的硬件系统
(1)自动驾驶汽车传感器
自动驾驶使用的感知类的传感器,主要有激光雷达、毫米波雷达、摄像头、组合导航。

图23 感知类的传感器
(a)激光雷达:安装在车顶,360度同轴旋转,可提供周围一圈的点云信息。激光雷达不仅用于车辆感知,也用于定位和高精度地图的测绘。(b)摄像头:光线通过镜头、滤光片到后段的CMOS或CCD集成电路,将光信号转换成电信号,再经过图像处理器(ISP)转换成标准的RAW,RGB或YUV等格式的数字图像信号,再通过数据传输接口传输到计算单元。(c)毫米波雷达:和激光雷达有点类似,基本原理是发射一束电磁波,通过观察回波和射入波的差异来计算距离和速度,主要分24G和77G,它的安装是在保险杠上面。(d)组合导航:GNSS+INS融合在一起就是组合导航系统。一是,GNSS板卡,通过天线接收GPS和RTK信号,解析计算出自身的空间位置。二是,当车辆行驶到林荫路,或者是有些建筑物,GPS就会没信号或者产生多径效应,定位就会产生偏移和不准。此时需要通过INS的信息融合来进行组合运算。
(2)传感器设计适用范围(表1)
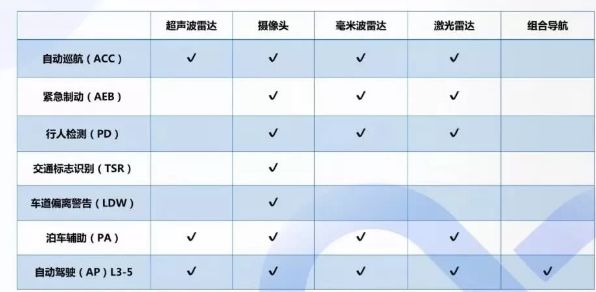
表1 传感器设计适用范围
(3)传感器与车速度的关系(a)不同速度下的刹车距离及参考值(表2)
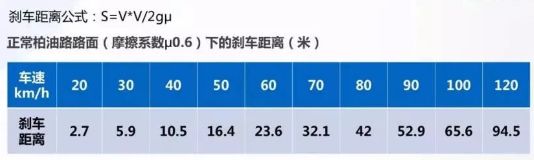
表2 不同速度下刹车距离计算公式及参考值
目前,我国城市封闭道路限速80,高速最高限速120。通过这个公式能计算出刹车距离,限速120的情况下最少需要150米的探测范围。(b)不同速度下制动距离计算公式及参考值(表3)
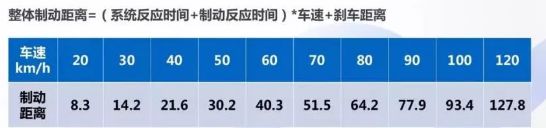
表2 不同速度下制动距离计算公式及参考值
限速120的情况下,其制动距离,如果能到200米会更好。
(4)传感器与分辨率的关系(见图24)
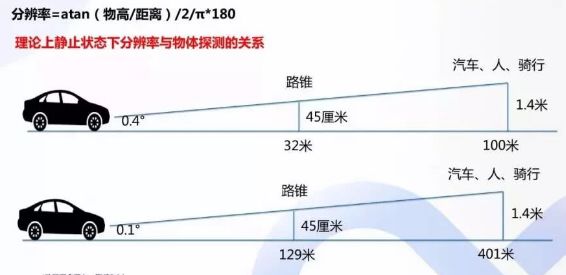
图24 传感器与分辨率的关系
分辨率是通过反正切函数来计算的。
2.自动驾驶汽车的计算单元
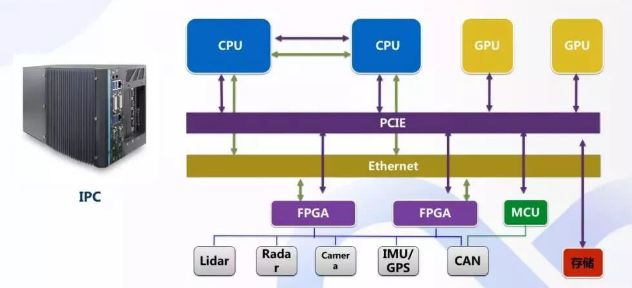
图25 自动驾驶汽车计算单元
(a)PCI-Express(peripheral component interconnect express)是一种高速串行计算机扩展总线标准;(b)以太网(Ethernet)是一种计算机局域网技术。以太网是目前应用最普遍的局域网技术,取代了其他局域网标准如令牌环、FDDI和ARCNET;(c)CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。
3.自动驾驶汽车的线控系统
图26 线控系统总成
自动驾驶车辆的线控系统,分减速、转向和加速三大部分。
(a)自动驾驶车辆的线控转向系统
(b)自动驾驶车辆的加速线控系统
(c)自动驾驶车辆的线控制动解决方案(图29)。MK C1将制动助力以及制动压力控制模块(ABS、ESC)集成一个制动单元当这个失效的时候还有一个MK 100保证冗余。

3.自动驾驶整车实例
1)Autopilot 2.0的特斯拉自动驾驶汽车
图30 Autopilot 2.0的特斯拉自动驾驶汽车
(a)该车共配备 8 个摄像头(3个前置摄像头(不同视角 广角、长焦、中等);2个侧边摄像头(一左一右);3个后置摄像头;12个超声波传感器(传感距离增加一倍);一个前置雷达(增强版);一个后置倒车摄像头),达到 360 度全车范围覆盖,最远检测可达 250 米;(b)搭载12颗超声波前置雷达可以穿越雨、雾、尘环境,丰富视觉系统的探测数据;传感器,用以辅助侦测,对物体的距离、软硬精准度有更大的提升;(c)增强版的毫米波雷达,能够在恶劣天气下工作,也能探测到前方车辆;(d)汽车主板集成了 Nvidia PX2 处理芯片,运算能力比起第一代自动驾驶系统要高 40 倍,其的性能是前款产品的40倍,大幅提升计算能力。
2)Apollo 2.5自动驾驶汽车
图 31 Apollo 2.5自动驾驶汽车
Apollo 2.5(限定区域内基于视觉的高速自动驾驶),2套新的硬件系统支持:第一套是禾赛的Pandora套件+2个广角摄像头+1个毫米波雷达;另一套是单目广角摄像头+1个毫米波雷达。
3)东风无人驾驶L4智能卡车
L4智能卡车具有自适应巡航系统和车道保持实现自动跟车、遇弯道行驶完全自主转向等功能。
4)深圳自动驾驶公交车
车上配有激光雷达、毫米波雷达、摄像头、GPS天线等设备,实现自动驾驶下的行人和车辆检测、减速避让、紧急停车、障碍物绕行、变道、自动按站停靠等功能。
图33 深圳自动驾驶公交车
-
传感器
+关注
关注
2577文章
55513浏览量
793965 -
控制器
+关注
关注
114文章
17878浏览量
195150 -
自动驾驶
+关注
关注
794文章
14989浏览量
181546
原文标题:【专家文章】雷洪钧:汽车自动驾驶技术与实例的研究(下)
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论