 意大利理工学院的Centauro团队开发出一款半人马机器人
意大利理工学院的Centauro团队开发出一款半人马机器人

据悉,意大利理工学院(IIT)的Centauro团队开发出一款半人马机器人Centauro,该机器人由一个人形机器人和一个四足机器人构成,即:将一个人形机器人的上半身安装在一个四足机器人的下半身之上,从而组成一个类似于半人马的机器人。
Centauro高1.5m、重93kg,外壳由轻金属及3D打印塑料制成,机身内部配有3台计算机,可处理感知、控制和运动规划等多种需求。同时,Centauro支持远程遥控和半自动操作,在通信中断或延迟的情况下,机载电脑可以自行预测机器人该如何移动。
Centauro的双臂可以举起约11kg的重物,与成年人的操控强度和灵活性相当,也可以表演“空手道劈木板”。
Centauro的下半身采用轮、腿混合动力驱动。其腿部有6个自由度,可以通过旋转和伸展臀部、膝盖和脚踝来实现关节的运动,同时,其还可以采用不同的配置,比如:四足机器人典型的腿部配置,包括内、外膝关节,以及蜘蛛腿的配置,这样的设计更有利于机器人操纵大型工具。Centauro底部的轮子由铝合金制成,外层用弹性体材料进行过模,保证了粘阻尼接触,以及在地面上滚动时产生适当的摩擦。
“半人马”设计不仅优化了Centauro的稳定性、灵活性和移动性,而且远程操作人员可以更直观、更有效地控制机器人的臂膀和手。
下一步,研究团队将对Centauro进行升级,希望机器人能胜任越来越复杂的移动操作任务,比如灾难救援;不断提高自主完成任务的能力,提高整体工作效率,实现在最少操纵者环境下的效率最大化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31700浏览量
224673 -
3D打印
+关注
关注
28文章
3661浏览量
119090
原文标题:意大利大学打造半人马机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
深圳理工大学校长樊建平一行到访普渡机器人考察交流
近日,深圳理工大学校长、国际欧亚科学院院士樊建平率队到访普渡机器人深圳总部考察交流。普渡机器人创始人兼CEO张涛携公司高管
广州团队研制出机器人“触觉皮肤”
机器人的发展日新月异,广州团队研制出机器人“触觉皮肤”!广州团队研制的亚毫米级双模态触觉传感器阵列,是机器人触觉技术发展的重要里程碑,它不仅
江智机器人技术核心团队
江智机器人技术核心团队是基于江智原有15年以上车辆产品研发团队基础上,以美国卡耐基梅隆大学CMU留学回国的赵国江为核心,汇聚了一批来自人工智能、机

从讲义到学院:钱学森1963年的“星际蓝图”与2026年的现实回响
历史的坐标:1961年的讲台与2026年的揭牌1961年秋,中国科学技术大学近代力学系的教室里,钱学森先生拿起了粉笔。在接下来的几个月里,他将自己在美国加州理工学院和麻省理工学院积累的深厚学识

探索Xilinx Kria KR260机器人入门套件:开启机器人应用开发新旅程
探索Xilinx Kria KR260机器人入门套件:开启机器人应用开发新旅程 在当今科技飞速发展的时代,机器人技术的应用越来越广泛。对于电子工程师来说,拥有
东莞理工学院“小眼睛科技杯”第四届集成电路设计与创新应用竞赛圆满落幕
BASEDINNOVATION“小眼睛科技杯”集成电路设计与创新应用竞赛2025年11月23日,东莞理工学院第四届集成电路设计与创新应用竞赛于学术会议中心圆满落幕。本届竞赛由校团委、学生工作部

探索RISC-V在机器人领域的潜力
探索RISC-V在机器人领域的潜力
测评人:洄溯
测评时间: 2025年11月
测评对象: MUSE Pi Pro开发板(基于进迭时空K1系列高性能RISC-V CPU)
一、
发表于 12-03 14:40
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
,已经成为机器人开发者不容忽视的核心处理器。而米尔电子的MYD-LR3576开发板,则以其丰富的接口、稳定的性能和成熟的软硬件支持,为快速原型验证和产品开发提供了绝佳的平台。如果您正在
发表于 10-29 16:41
格罗方德与新加坡理工学院签署谅解备忘录
2025年10月15日,格罗方德新加坡公司(GlobalFoundries Singapore,简称GFS)与新加坡理工学院(Singapore Polytechnic,简称SP)签署了一份谅解备忘录,旨在就新加坡半导体行业的数字人才培养展开合作。
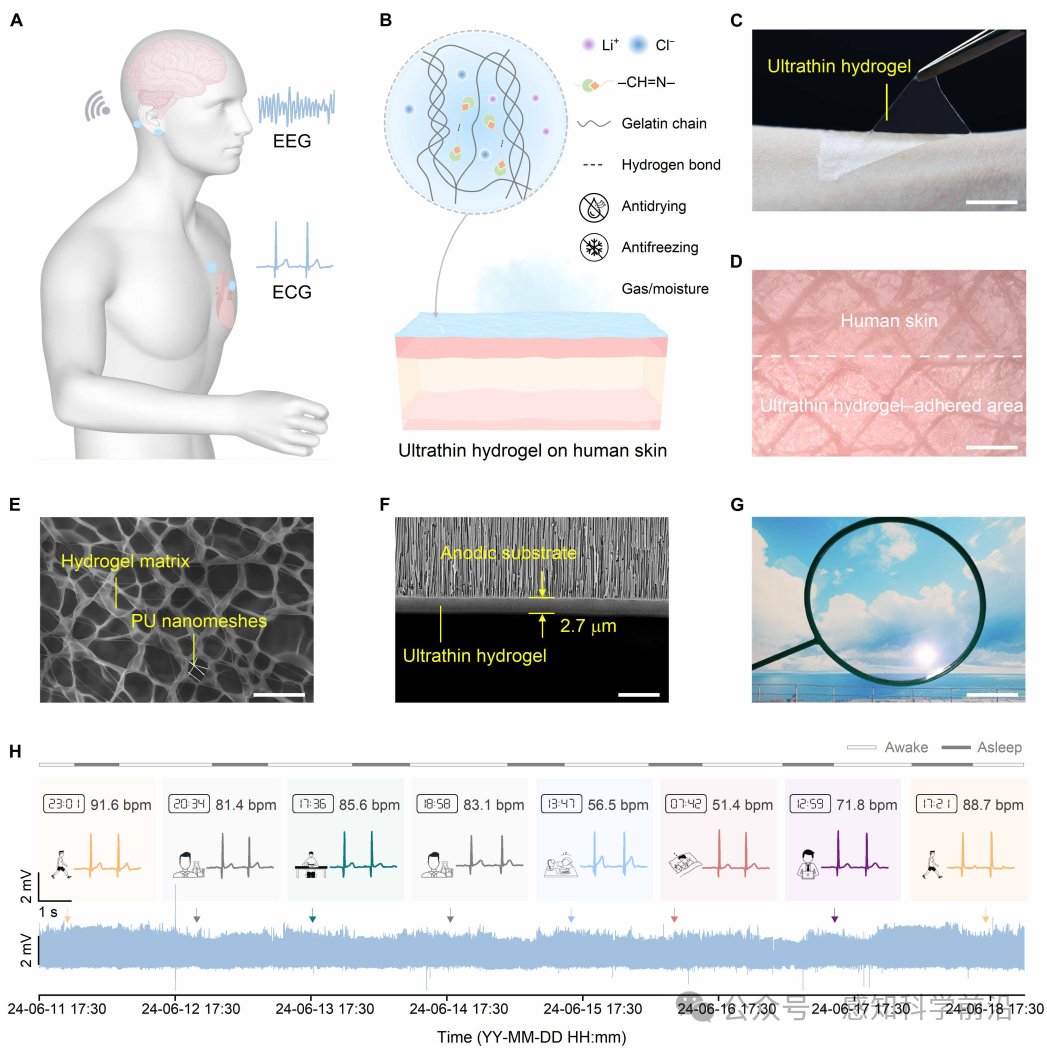
广东理工学院-以色列理工学院:研究一种用于长期便携式健康监测的超薄水凝胶电极
一、摘要 可适应的水凝胶生物电子设备在早期疾病诊断和个性化医疗中至关重要,能够维持长期不间断的操作。然而,传统的水凝胶电极存在机械脆弱、快速脱水、冻结以及因厚度引起的界面间隙导致的舒适性差等问题。在
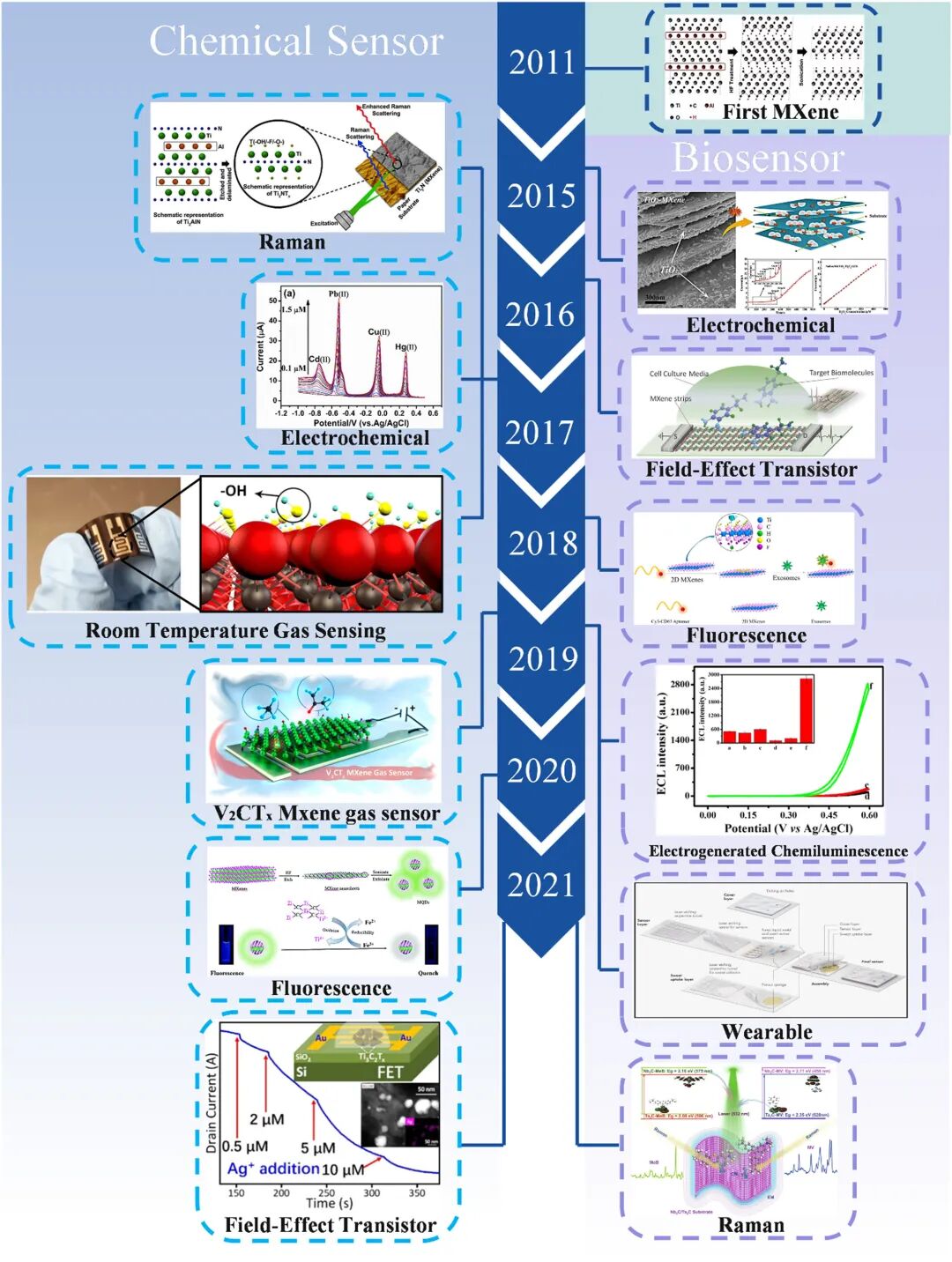
苏黎世联邦理工学院、西南交通大学:关于研究MXenes-环境生化传感平台新型材料
近日, 苏黎世联邦理工学院王京课题组 联合 西南交通大学赵志俊课题组 及 四川大学张传芳课题组 ,在 高起点新刊Electron 发表了题为“MXenes: Emerging Materials
工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此
发表于 07-26 11:22
Wolfspeed与纽约州立大学理工学院加强教育研究合作
纽约州立大学理工学院(SUNY Poly)在 近日举行的新闻发布会上宣布,任命两名教职人员为 Wolfspeed 捐赠讲席教授(Wolfspeed Endowed Chairs),标志着该校研究扩展的重要里程碑。
突破麻省理工学院技术垄断,深圳传感器公司带来全新机器人触觉传感器技术
近日 戴盟机器人CEO段江哗 赴亚特兰大参加 2025 IEEE国际机器人 与自动化大会(ICRA 2025) 顾不上时差带来的疲惫感 他一下飞机 就投入到筹备工作中 在这次海外首秀上 这家深企带来

伟创力与麻省理工学院 (MIT) 就其全新的“新制造倡议”(INM) 达成战略合作
行业巨擘+全球顶级学府 近日,伟创力与 麻省理工学院 (MIT) 就其 全新的“新制造倡议”(INM) 达成战略合作 。作为INM行业联盟的 创始成员 ,伟创力将在这一项目中与MIT的研究人员



评论