 MAX96705:汽车摄像头应用的理想之选
MAX96705:汽车摄像头应用的理想之选

MAX96705:汽车摄像头应用的理想之选
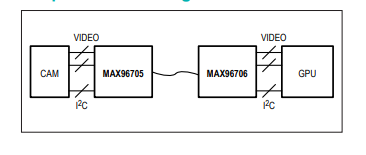
在汽车摄像头应用领域,数据传输的高效性、稳定性和安全性至关重要。MAX96705作为一款紧凑的16位GMSL串行器,以其卓越的性能和丰富的特性,成为了汽车摄像头系统设计的有力解决方案。
文件下载:MAX96705.pdf
一、产品概述
MAX96705专为汽车摄像头应用量身定制,功能和引脚与MAX9271兼容。在高带宽模式下,对于12位线性或组合HDR数据类型,并行时钟最大值可达116MHz。其嵌入式控制通道在UART、I2C和混合UART/I2C模式下,工作速率为9.6kbps至1Mbps,可独立于视频时序对串行器、解串器和摄像头寄存器进行编程。
该芯片具备可编程的预加重/去加重功能,有助于驱动更长的电缆;串行输出支持可编程扩频,满足ISO 10605和IEC 61000 - 4 - 2 ESD标准。其核心电源范围为1.7V至1.9V,I/O电源范围为1.7V至3.6V,采用32引脚(5mm x 5mm)TQFN封装,工作温度范围为 - 40°C至 + 115°C。
二、产品特性与优势
(一)安全摄像头应用的理想选择
- 低成本电缆兼容性:可与低成本的50Ω同轴电缆(100Ω STP电缆)配合使用,降低系统成本。
- 数据错误检测:具备视频/控制数据的错误检测功能,确保数据传输的准确性。
- 高抗扰模式:高抗扰模式增强了控制通道的EMC耐受性,提高系统的可靠性。
- 控制数据重传:检测到错误时可重传控制数据,减少通信错误的影响。
- 低功耗:最大93mA的低供电电流,降低系统功耗。
- 长电缆驱动:预加重/去加重功能支持在全速下驱动15m的电缆。
- 紧凑封装:32引脚(5mm x 5mm)TQFN封装,节省电路板空间。
(二)高速数据序列化
- 高数据速率:串行比特率最高可达1.74Gbps,满足高清摄像头的数据传输需求。
- 多模式支持:支持多种输入时钟频率和数据位宽,如12.5MHz至87MHz x 14位 + H/V数据,36.66MHz至116MHz x 12位 + H/V数据(通过内部编码)。
(三)系统灵活性
- 多模式控制通道:控制通道支持9.6kbps至1Mbps的UART、I2C(带时钟拉伸)或UART - to - I2C模式,满足不同应用场景的需求。
- 交叉点开关:交叉点开关可接受任何输入位图,实现灵活的数据路由。
- 编码同步信号:支持编码VSYNC和HSYNC信号,释放更多视频位插槽。
(四)降低EMI和屏蔽要求
- 可编程输出扩频:通过扩频降低时钟频率峰值,减少电磁干扰。
- 跟踪扩频输入:串行器和解串器可跟踪扩频输入时钟,无需多个扩频时钟。
- 宽I/O电源范围:1.7V至3.6V的I/O电源范围,增强系统的适应性。
(五)摄像头电源启动和验证
- 内置PRBS发生器:用于误码率测试,方便系统调试和优化。
- 专用GPO:可用于摄像头帧同步触发等用途。
- 远程/本地唤醒:支持从睡眠模式远程或本地唤醒,降低功耗。
(六)符合汽车规范
- 宽温度范围: - 40°C至 + 115°C的工作温度范围,适应汽车恶劣的工作环境。
- ESD保护:具备 ± 8kV接触和 ± 15kV空气的IEC 61000 - 4 - 2和ISO 10605 ESD保护,提高系统的可靠性。
三、技术细节
(一)串行链路信号和数据格式
串行器对输入的并行数据进行加扰,并与前向控制数据组合,然后进行编码传输,输出为单串位流。解串器接收串行数据,恢复时钟信号,对数据进行解串、解码和解扰,得到并行输出数据和前向控制数据。
(二)工作模式
- 视频/配置链路:正常工作时,串行器以视频链路模式运行,发送视频和控制数据。可通过设置SEREN和CLINK位在视频链路和配置链路之间切换,也可通过设置AUTO_CLINK位实现自动切换。
- 单/双模式:单模式适用于所有GMSL设备和串行器,每个串行字对应一个并行字;双模式下,每个串行字对应两个半宽并行字,并行字速率范围提高2倍。
- HS/VS编码:默认情况下,GMSL为HSYNC、VSYNC和DE分配视频位插槽。启用HS/VS编码后,通过编码特殊数据包来同步信号,释放更多视频位插槽。
- 错误检测:串行链路采用8b/10b编码/解码和1位奇偶校验检测位错误,还可选择6位CRC校验进一步提高数据可靠性。此外,还提供32位视频行CRC检测。
(三)控制通道和寄存器编程
- 前向控制通道:将串行器的控制数据发送到解串器,数据编码为高速链路中的一个串行位,解串后从串行链路中提取。
- 反向控制通道:将解串器的控制数据发送到串行器,数据编码为一系列1μs脉冲,最大原始数据速率为1Mbps。高抗扰模式可提高反向控制通道的鲁棒性,但会降低原始比特率。
- UART接口:支持基模式和旁路模式。基模式用于通过UART - to - I2C转换与串行器、解串器和I2C外设通信;旁路模式允许使用任何UART协议进行全双工UART通信。
- I2C接口:通过控制通道连接串行器和解串器的I2C接口,允许单个微控制器配置串行器、解串器和外设。支持双微控制器操作,但需要软件仲裁方法。
- 远程端操作:当I2C主设备在本地从设备发起通信时,远程端设备作为主设备转发数据,并将接收到的外设数据转发回本地。
- 时钟拉伸时序:I2C接口使用时钟拉伸,允许数据在串行链路上转发,主微控制器和外设需接受GMSL设备的时钟拉伸。
- 基于数据包的I2C:提供基于数据包的控制通道,用于增强控制通道的错误处理,支持同时进行GPI/GPO和I2C传输,具备错误检测和重传功能。
(四)其他特性
- 扩频:串行器包含可编程扩频输出,降低发射电平。串行器和解串器可跟踪扩频输入时钟,无需多个扩频时钟。
- 电缆类型配置:驱动输出可针对100Ω双绞线和50Ω同轴电缆进行编程。
- 交叉开关:交叉开关实现并行输入/输出和SerDes之间的数据路由,确保视频源和目标之间的映射。
- 视频时序发生器:串行器包含可编程视频时序发生器,用于生成/重定时输入同步信号,可修改摄像头的输入时序,过滤同步信号中的毛刺。
- 睡眠/关机模式:提供多种睡眠和关机模式,在不需要全功能运行时降低功耗。
四、应用信息
(一)并行接口
CMOS并行接口的数据宽度可编程,较大的宽度(BWS = 1)可降低像素时钟速率,较小的宽度(BWS = 0)允许更高的像素时钟速率。
(二)总线数据宽度和速率
总线数据宽度取决于所选模式,使用错误检测或双模式(DBL = 1)时可用总线宽度会减少。总线数据速率取决于BWS和DBL的设置。
(三)交叉开关编程
交叉开关默认将串行器输入引脚DIN_和HS/VS连接到解串器输出引脚DOUT_和HS/VS。更改输入或输出引脚分配,或连接不支持DBL = 1模式的设备时,需要重新编程交叉开关。
(四)时序发生器编程
时序发生器参数以PCLK周期为单位存储在寄存器中。为防止输出毛刺,应在配置链路模式或未应用PCLK时编程所有时序发生器参数。
(五)双模式对齐
当串行器和解串器的DBL都为1时,GMSL自动保持像素顺序。当串行器的DBL = 1,解串器的DBL = 0(或不支持)时,可使用双模式对齐,有外部高低信号对齐和从HS或DE对齐两种方法。
(六)控制通道接口
- I2C:设置I2CSEL = 1可配置控制通道为I2C到I2C模式,使用时钟拉伸确保数据传输。I2C接口接受9.6kbps至1Mbps的比特率,可通过编程I2C_MSTBT和SLV_SH位匹配微控制器的I2C速率。
- UART:设置I2CSEL = 0可配置控制通道为UART或UART - to - I2C模式。基模式下,UART数据包控制串行器、解串器和外设;UART - to - I2C转换允许远程设备通过UART与I2C外设通信;UART旁路模式下,控制通道作为全双工链路转发UART命令。
(七)扩频
通过编程串行器的SS位开启扩频,但不要同时在串行器和解串器上启用扩频,以免抵消扩频的好处。某些扩频幅度只能在较低的PCLKIN频率下使用。
(八)电路板布局
- 电源电路和旁路:串行器使用1.7V至1.9V的AVDD和DVDD,除串行输出外,所有输入和输出的电源来自1.7V至3.6V的IOVDD。适当的电源旁路对于高频电路稳定性至关重要。
- 高频信号:分离LVCMOS逻辑信号和CML/同轴高速信号,防止串扰。使用四层PCB,为电源、接地、CML/同轴和LVCMOS逻辑信号设置单独的层。
- ESD保护:该设备具备Human Body Model、IEC 61000 - 4 - 2和ISO 10605的ESD耐受性,可有效保护设备免受静电干扰。
五、总结
MAX96705凭借其丰富的特性和卓越的性能,为汽车摄像头应用提供了全面的解决方案。无论是在数据传输的高效性、系统的灵活性,还是在抗干扰和低功耗方面,都表现出色。对于电子工程师来说,在设计汽车摄像头系统时,MAX96705无疑是一个值得考虑的选择。你在使用MAX96705或类似产品时遇到过哪些问题呢?欢迎在评论区分享你的经验和见解。
-
数据传输
+关注
关注
9文章
2250浏览量
67793
发布评论请先 登录
uCAM-III 串口摄像头模块:嵌入式成像的理想之选
ADV7992/ADV7993:汽车摄像头总线发射器的卓越之选
汽车摄像头应用利器:MAX96700 14位GMSL解串器深度解析
CX3 Vsync Hsync时序参数如何修改?
MAX96705 16位GMSL串行器,带高抗扰性/高带宽模式和同轴或STP电缆驱动技术手册



评论