 高速驱动系统中的单电阻电流采样延迟补偿与动态偏移算法
高速驱动系统中的单电阻电流采样延迟补偿与动态偏移算法

倾佳杨茜-变频硬件-高速驱动系统中的单电阻电流采样延迟补偿与动态偏移算法研究
引言与产业背景剖析
在全球电气化与自动化的宏观浪潮下,电机控制系统正经历着一场深刻的技术变革。从新能源汽车的牵引逆变器、航空航天领域的电动涡轮增压器,到工业自动化中的高速主轴电机以及高端家电中的离心式压缩机,超高速电机(转速达到或超过 100,000 RPM)因其极高的功率密度和卓越的动态响应能力,正成为学术界与工业界竞相研发的核心制高点 。在这些超高速应用场景中,为了抑制极低定子电感带来的高频电流纹波,并确保系统在极高基波频率下依然拥有充足的控制带宽,逆变器的开关频率必须大幅提升,通常需要达到 50 kHz 甚至 100 kHz 以上 。

这一高频化趋势直接得益于第三代宽禁带(WBG)半导体材料的成熟,尤其是碳化硅(SiC)MOSFET 的大规模商业化应用。与传统的硅基绝缘栅双极型晶体管(Si IGBT)相比,SiC MOSFET 具有更宽的禁带宽度、更高的临界击穿电场以及卓越的热导率,能够在提供极低导通电阻的同时,实现纳秒级的超快开关速度,从而将高频运行下的开关损耗降至极低水平 。然而,牵引整个驱动系统向高频、高速、高功率密度演进的过程中,一个关键的系统级瓶颈逐渐浮出水面,那就是高频开关环境下的相电流精确采样与闭环反馈控制问题 。基本半导体一级代理商-倾佳电子力推BASiC基本半导体SiC碳化硅MOSFET单管,SiC碳化硅MOSFET功率模块,SiC模块驱动板,PEBB电力电子积木,Power Stack功率套件等全栈电力电子解决方案。
基本半导体授权代理商倾佳电子杨茜致力于推动国产SiC碳化硅模块在电力电子应用中全面取代进口IGBT模块,助力电力电子行业自主可控和产业升级!
倾佳电子杨茜咬住SiC碳化硅MOSFET功率器件三个必然,勇立功率半导体器件变革潮头:
倾佳电子杨茜咬住SiC碳化硅MOSFET模块全面取代IGBT模块和IPM模块的必然趋势!
倾佳电子杨茜咬住SiC碳化硅MOSFET单管全面取代IGBT单管和大于650V的高压硅MOSFET的必然趋势!
倾佳电子杨茜咬住650V SiC碳化硅MOSFET单管全面取代SJ超结MOSFET和高压GaN 器件的必然趋势!
在追求极致小型化和低成本的商业逻辑驱动下,传统的双电阻或三电阻相电流采样方案因其体积庞大、成本高昂且存在多通道增益不一致性等缺陷,逐渐被直流母线单电阻电流采样(Single-Shunt Current Sensing)技术所取代 。单电阻采样技术仅在直流母线的负极回路上串联一个微欧姆级的分流电阻,通过单运放和单模数转换器(ADC)即可实现三相电流的重构,极大地简化了印制电路板(PCB)的布线难度,缩减了物料清单(BOM)成本,并天然消除了各相之间的采样比例误差 。
然而,事物的发展总是伴随着矛盾的转移。单电阻采样技术在高频开关与超高转速的双重极限工况下,暴露出极其致命的痛点:随着开关频率的成倍提升,PWM 周期被极度压缩,导致在空间矢量脉宽调制(SVPWM)的特定扇区内,用于电流采样的有效时间窗口变得极为狭窄,甚至完全消失 。更为严峻的是,系统硬件与软件的固有延迟在 100,000 RPM 的超高电频率下,会被放大为灾难性的电流环相位滞后,直接摧毁磁场定向控制(FOC)的解耦坐标系,引发严重的扭矩脉动、系统失稳甚至功率器件的炸机损毁 。
本报告将从底层物理机制出发,详尽剖析高速驱动器中单电阻电流采样的拓扑约束与多维延迟来源。在此基础上,深入推演“采样时间点动态偏移算法”的核心数学理论,并结合最前沿的研发实战经验,系统性地论述如何通过硬件交叉触发技术、基于转速的相位预估计数学模型,以及基于特定 SiC MOSFET(如基本半导体 BMF 系列)及高性能驱动器(如青铜剑技术 2CP 系列)特性的“开关时刻-采样有效点”多维映射表,彻底攻克 100,000 RPM 超高速工况下的相电流重构与闭环稳定控制难题。
空间矢量调制与单电阻采样的拓扑约束机制
要深刻理解单电阻采样的痛点,必须首先从三相电压型逆变器(VSI)的拓扑结构以及空间矢量脉宽调制(SVPWM)的数学模型入手。在标准的 FOC 控制框架中,微控制器(MCU)或数字信号处理器(DSP)通过克拉克(Clarke)和帕克(Park)变换将三相定子电流解耦为产生磁链的 d 轴电流和产生转矩的 q 轴电流,随后经过比例积分(PI)调节器计算出目标电压矢量,最终由 SVPWM 模块生成六路 PWM 信号控制逆变器的桥臂 。
直流母线电流与三相电流的物理映射关系
在三相逆变器中,假设上桥臂导通状态记为 1,下桥臂导通状态记为 0,则三相桥臂(A、B、C)共可以组合出 8 种基础开关状态。这 8 种状态在复平面上对应着 6 个非零的有效电压矢量(V1 至 V6)和 2 个零电压矢量(V0 和 V7)。单电阻采样技术的理论基石在于,当逆变器处于非零有效矢量状态时,直流母线上的回流电流(IDC)与电机的某一相电流存在确定且唯一的代数映射关系。这种物理映射关系为通过单一传感器重构三相交流电流提供了可能性 。
以下表格详细列出了 SVPWM 的 8 种基础开关状态、其对应的电压矢量、桥臂导通情况以及在该状态下直流母线电流与电机三相电流的精确对应关系。
| 空间电压矢量 | 开关状态 (A, B, C) | 导通的功率器件 | 直流母线电流 (IDC) 映射关系 | 物理意义 |
|---|---|---|---|---|
| V0 | (0, 0, 0) | 所有下桥臂导通 | 0 | 零矢量,电机电流在下桥臂内部续流,无法采样。 |
| V1 | (1, 0, 0) | A相上桥,B、C下桥 | +IA | 电流从A相流入,经B、C相流出,母线电流等于A相电流。 |
| V2 | (1, 1, 0) | A、B上桥,C相下桥 | −IC | 电流从A、B相流入,经C相流出,母线电流等于负的C相电流。 |
| V3 | (0, 1, 0) | B相上桥,A、C下桥 | +IB | 电流从B相流入,经A、C相流出,母线电流等于B相电流。 |
| V4 | (0, 1, 1) | B、C上桥,A相下桥 | −IA | 电流从B、C相流入,经A相流出,母线电流等于负的A相电流。 |
| V5 | (0, 0, 1) | C相上桥,A、B下桥 | +IC | 电流从C相流入,经A、B相流出,母线电流等于C相电流。 |
| V6 | (1, 0, 1) | A、C上桥,B相下桥 | −IB | 电流从A、C相流入,经B相流出,母线电流等于负的B相电流。 |
| V7 | (1, 1, 1) | 所有上桥臂导通 | 0 | 零矢量,电机电流在上桥臂内部续流,无法采样。 |
基于上述映射关系,在一个典型的 SVPWM 周期内(采用七段式对称调制),系统会依次经历零矢量、两个相邻的有效矢量、以及另一个零矢量。只要 MCU 能够在这两个有效矢量持续的时间窗口内分别对母线上的分流电阻进行两次快速的模数转换(ADC)采样,即可获得两相独立的定子电流。由于在三相无中性点引出的星型或角型接法电机中,基尔霍夫电流定律(KCL)规定 IA+IB+IC=0,因此只要获得了任意两相的电流,第三相的电流即可通过简单的代数减法计算得出 。这种机制在理论上是完美的,它将复杂的三相传感降维为单点时分复用传感。
采样盲区(Star Area)的拓扑性失效问题
尽管单电阻采样在理论上无懈可击,但其在工程实践中面临着一个严峻的拓扑性约束:ADC 模数转换器并非在瞬间完成采样,它需要一个最小的“安全采样窗口”以确保信号的稳定和转换的精确 。如果在某一个开关周期内,SVPWM 算法合成的有效矢量持续时间短于这个安全窗口,该相电流的采样将因信号不稳定或被寄生振铃淹没而失效 。
这种有效矢量时间过短的极端情况主要发生在以下两个宏观运行区域: 首先是低调制指数(Low Modulation Index)区域。当电机处于启动阶段或极低速轻载运行时,逆变器输出的电压幅值非常小。在 SVPWM 矢量图中,目标参考电压矢量靠近六边形的圆心。此时,为了合成如此微小的电压,算法会分配绝大部分的时间给零矢量(V0 和 V7),而分配给两个有效矢量的驻留时间均极短,这导致在整个周期内根本没有足够宽的时间槽供 ADC 进行两次连续且独立的采样 。
其次是扇区边界(Sector Boundary)区域。当目标参考电压矢量随着电机的旋转而在空间内划过,并穿越两个相邻扇区的分界线时,其中一个合成该矢量的有效矢量的投影分量会趋近于零。例如,当参考矢量从第一扇区向第二扇区过渡时,分配给矢量 V1 的时间会逐渐减小至零,而分配给矢量 V2 的时间会逐渐增加。在这个边界过渡地带,必然会有一个有效矢量的持续时间小于 ADC 的安全采样窗口。如果不加以干预,在空间矢量的六个扇区交界处,单电阻采样系统将周期性地丢失一相的电流数据,这种周期性的盲区在电流波形中被称为“星形盲区”(Star Area),它会引发不可接受的谐波畸变和严重的低频扭矩震荡 。
高频高压交变环境下的多维硬件延迟物理机制剖析
在传统的 IGBT 驱动应用中(通常开关频率低于 10 kHz),PWM 周期长达 100 μs。在如此宽裕的时间尺度下,通过对占空比进行微小的限制或补偿,即可轻易避免采样盲区。然而,当应用场景转移到 100,000 RPM 的超高速电机,并采用 SiC MOSFET 以 100 kHz 的频率进行高频斩波时,一个 PWM 周期被极度压缩至仅仅 10 μs 。此时,纳秒(ns)级别的硬件延迟都会成为阻碍相电流重构的致命因素 。
要精确实施采样时间点动态偏移算法,工程师必须对系统中每一个极微小的时间延迟节点进行极其严苛的物理建模。完成一次可靠的单电阻采样,所需的最小有效矢量持续时间(Tmin_dur)由一系列硬件和器件物理延迟共同决定,其数学不等式可以严格表述为:
Tmin_dur>Tdeadtime+Tpd+Tturn_on+Tringing+Tsettling+TADC_S&H
为了全面理解这一严苛的制约条件,我们以基本半导体(BASiC Semiconductor)的 1200V 工业级 SiC MOSFET 模块,以及青铜剑技术(Bronze Technologies)的 2CP0225Txx 系列双通道即插即用 SiC MOSFET 驱动板为例,逐一解剖这些延迟的物理机理及其在不同工况下的漂移特性 。
驱动逻辑与死区时间延迟(Tpd+Tdeadtime)
控制信号的旅程始于微控制器(MCU)。当 DSP 计算出新的占空比并更新 PWM 寄存器时,电平信号首先需要穿过隔离栅到达驱动器的高压侧。 青铜剑技术的 2CP0225Txx 驱动板专为 ED3 封装的 SiC MOSFET 半桥模块设计,提供了高达 5000V 的绝缘耐压,单通道支持 2W 的驱动功率和 ±25A 的峰值电流 。根据其详尽的数据手册,该驱动器的 PWM 指令传输延时(即从输入信号 50% 至输出摆幅 10% 或 90% 的时间)典型值为 200 ns 。这意味着,当控制代码决定在此刻改变开关状态时,物理电平真正在栅极电阻前发生翻转,已经过去了 200 ns 。此外,该驱动器的开通和关断延迟抖动量(Jitter)被严格控制在 ±8 ns 。在 100 kHz 频率下,1% 的占空比仅为 100 ns,因此极低的时钟抖动是实现高频极窄窗口采样的首要前提。
除了纯粹的传输延时,死区时间(Dead Time)也是一个巨大的时间开销。为了防止同一桥臂的上下两个 SiC MOSFET 发生毁灭性的直通短路,硬件或软件中必须强行插入一段两管均关断的死区时间。2CP0225Txx 驱动器在半桥模式下内置了 3 μs 的典型死区时间 。然而,在 10 μs 的开关周期内,3 μs 的死区是绝对无法容忍的。因此,在超高速高频应用中,工程师必须将驱动器配置为“直接模式”(MOD 端子悬空),绕过硬件内置死区,转而通过 MCU 的高精度定时器生成纳秒级(通常为几百纳秒)的精确死区,以此最大限度地榨取可用采样窗口 。
宽禁带功率器件的非线性开关延迟(Tturn_on+tr)
控制信号到达栅极后,SiC MOSFET 的结电容需要被充放电,这引入了功率器件层面的开通延迟(td(on))和电压上升/下降时间(tr / tf)。这些参数并非恒定不变,而是深受结温(Tvj)、漏极电流(ID)和直流母线电压(VDS)的非线性调制 。
以基本半导体的 BMF540R12KHA3 模块为例,该模块采用 62mm 封装,额定电压 1200V,标称电流 540A,配备了先进的氮化硅(Si3N4)AMB 陶瓷基板和铜底板以优化散热 。在其规格书中,我们可以清晰地观察到 SiC 独有的温度漂移特性,详见下表的严谨对比(测试条件:VGS=+18V/−5V, VDS=800V, ID=540A, RG(on)=5.1Ω, RG(off)=1.8Ω):
| 开关时序参数 (BMF540R12KHA3) | 结温 Tvj=25∘C | 结温 Tvj=175∘C | 随温度上升的偏移量及趋势 |
|---|---|---|---|
| 开通延迟时间 (td(on)) | 119 ns | 89 ns | 缩短 30 ns (开通变快) |
| 电流上升时间 (tr) | 75 ns | 65 ns | 缩短 10 ns (爬升变快) |
| 关断延迟时间 (td(off)) | 205 ns | 256 ns | 延长 51 ns (关断变慢) |
| 电流下降时间 (tf) | 39 ns | 40 ns | 基本不变 (延长 1 ns) |
| 体二极管反向恢复时间 (trr) | 29 ns | 55 ns | 延长 26 ns (恢复变慢) |
数据揭示了一个违背传统硅基器件直觉的关键现象:在高温极限下,SiC MOSFET 的开通变得更为迅速,而关断过程却显著拖延。这种非对称的温度漂移,结合反向恢复时间的翻倍,会导致相电流在换流瞬间的动态行为在整个运行周期中不断地向前或向后“游移” 。如果控制算法将这种高度动态的物理延迟视为一个静态常量进行硬件补偿,ADC 将极易踩中换流时的震荡尖峰,从而获取完全错误的电流反馈,彻底摧毁控制环路的稳定性 。
寄生振铃与模拟前端建立时间(Tringing+Tsettling)
SiC MOSFET 以其极低的开关损耗著称,这得益于其极高的 dv/dt 和 di/dt 能力(例如,电流变化率可轻易突破 8kA/μs)。然而,这种超高速的瞬态切换,不可避免地会与系统中的杂散电感(如功率回路电感、分流电阻寄生电感)以及器件的非线性结电容(如基本半导体 BMF240R12E2G3 模块的 Coss 为 0.9 nF,Crss 为 0.03 nF)发生高频 LC 谐振 。在这个持续数百纳秒的振铃(Ringing)期间,分流电阻上的电压是处于混乱的高频震荡状态的,任何在此期间进行的模数转换都毫无意义 。
当振铃逐渐衰减后,信号链还面临着模拟前端调理电路的考验。分流电阻上的压降通常只有几十毫伏(例如,使用 1 mΩ 的采样电阻在 50A 电流下产生 50 mV 压降),这必须通过高共模抑制比(CMRR)的运算放大器(Op-Amp)放大至微控制器 ADC 的有效满量程区间(如 0~3.3V)。在 100 kHz 乃至更高的开关频率下,运放的压摆率(Slew Rate)和增益带宽积(GBW)成为了致命瓶颈 。为了确保在 1 μs 的狭窄窗口内信号能够以 1% 的精度稳定下来,必须采用具备超高压摆率的高速运放。即便如此,Tsettling 也往往会吞噬掉几百纳秒的宝贵时间 。
最后,微控制器内部的 ADC 本身需要消耗一段采样保持时间(TADC_S&H)来让内部采样电容充电至外部电压电平,这通常需要 100 ns 至 200 ns 。综合以上所有物理层面的延迟与建立时间,完成一次精确可靠的相电流采样,通常需要至少 1.5 μs 到 2.5 μs 的净有效矢量时间。在 100 kHz 的系统中,这构成了对占空比极端的硬性约束 。
100,000 RPM 超高速工况下的控制环路相位滞后模型
高频开关引发的采样窗口变窄只是痛点之一,其伴生问题是在 100,000 RPM 超高转速下,任何微小的控制延迟都会被放大为极其致命的电流环相位滞后 。要剖析这一机理,我们需要将时间尺度映射到电机的空间电角度上。

延迟转化为电角度的数学推演
考虑一台应用在微型离心压缩机中的超高速永磁同步电机(PMSM),假设其机械转速达到 100,000 RPM。如果该电机采用最简单的一对极(极对数 p=1)设计,其旋转的电频率 fe 为:
fe=60RPM×p=60100,000×1≈1666.67Hz
对应的角频率 ωe 为:
ωe=2πfe≈10471.97rad/s
在现代数字化数字控制系统中,从获取反馈到施加控制动作存在不可逾越的传输延迟(Transport Delay)。一个标准的数字 FOC 控制环路包含以下时间开销:
ADC 在 PWM 周期的特定时刻完成电流和位置采样的延迟;
MCU/DSP 执行克拉克变换、帕克变换、转速观测器迭代、双闭环 PI 调节以及 SVPWM 占空比计算的计算延迟;
将计算出的比较寄存器值(如 CMPA、CMPB)装载并在下一个或下半个 PWM 周期实际生效的更新延迟 。
如果系统采用 50 kHz 的控制频率(控制周期 Ts=20μs),并采用最激进的“立即更新”策略,系统的平均净滞后时间通常也需要 1.5 倍的控制周期,即 Ttotal_delay≈30μs 。
在这 30μs 的控制死区内,转子并不会停止旋转。它在空间中划过的电角度 Δθlag 为:
Δθlag=ωe×Ttotal_delay=10471.97×30×10−6≈0.314rad≈18∘
如果电机是两对极(p=2),电频率翻倍至 3333 Hz,同样的 30μs 延迟将产生高达 36∘ 的严重相位滞后 !
d-q 轴解耦失效与系统失稳
在低速应用中,几度的延迟可以通过 PI 调节器的鲁棒性予以吸收。但在超高速驱动中,36∘ 的相位滞后具有毁灭性的物理后果。FOC 算法的核心精髓在于将定子电流通过旋转坐标变换,投影到与转子磁链完全平行的 d 轴(励磁电流分量)和完全垂直的 q 轴(转矩电流分量)上,从而实现对交流电机的解耦直流化控制 。
当控制器依据严重滞后的角度 θmeas 施加期望为纯 q 轴的定子电压时,由于真实的转子已经超前了 36∘,实际作用于电机的电压矢量将会产生严重的交叉耦合(Cross-Coupling)。这不仅会导致 q 轴转矩电流急剧下降(电机输出扭矩暴跌,效率急剧恶化),还会非预期地在 d 轴上产生极大的去磁(弱磁)或增磁电流 。这种错位的激励会在极低电感的电机绕组中激发出恐怖的电流尖峰和不可控的转矩震荡,如果不施加进阶的算法补偿,系统将毫无悬念地迅速发散并导致功率级硬件的毁灭性损坏 。
核心控制理论——采样时间点动态偏移算法(Dynamic Offset Algorithm)
为了同时解决低调制度/扇区边界下的极窄采样窗口问题,必须在底层空间矢量调制算法中引入“采样时间点动态偏移算法”(Dynamic Offset Algorithm)及其衍生出的非对称脉宽调制(Asymmetric PWM)重构技术 。
突破中心对齐调制的绝对对称性约束
在传统的 FOC 控制系统中,为了最小化电流谐波并降低功率器件的开关损耗,SVPWM 普遍采用中心对齐(Center-Aligned)或对称的 PWM 调制策略。在这种模式下,一个开关周期被严格等分为两半,所有桥臂的开通和关断动作都围绕着周期的中心点(通常是三角波载波的顶点或底点)呈镜像对称分布 。虽然这保证了伏秒积分的最优化,但其致命缺陷在于:当某一个有效矢量(例如 V1)的持续时间不足时,这一本就短促的时间还要被对称地分配到周期的前半段和后半段。例如,若计算得出 V1 的驻留时间仅为 1μs,在中心对齐模式下,前半周期仅分配到 0.5μs,后半周期也只有 0.5μs。这使得满足 1.5μs 最小硬件延迟约束成为完全不可能的任务 。
动态偏移算法的核心革命在于打破这种刻板的对称性。该算法实时监控控制器计算出的各有效矢量的持续时间,当识别到某一个非零电压矢量 Tx 小于设定的安全死区阈值 Tsafe 时,算法立即介入干预 。其数学操作原则为:在严格保证整个 PWM 周期内各桥臂导通时间的总积分(即伏秒平衡 Volt-Second Balance)绝对不变的前提下,人为地平移(Shift)相关桥臂逻辑电平的跳变边沿 。
非对称双边调制(Double Switching)的实施细节
以第一扇区为例,该扇区由有效矢量 V1(100) 和 V2(110) 合成。假设因为目标参考电压矢量靠近第一扇区和第六扇区的边界,导致计算出的 V2 的驻留时间极短,无法满足单电阻采样的要求。
动态偏移算法会主动修改 C 相(或者与之相关的 B 相)的比较器数值。通过将 B 相的下降沿在前半个开关周期内向右(向后)延迟 Δt,并在后半个开关周期内将其上升沿向左(向前)等量提前 Δt。经过这种非对称处理,B 相在一个完整周期内的总高电平时间丝毫未减,因此输出到电机的基波电压完全没有畸变。但是,前半周期的 V2 有效时间被大幅度拉长到了 T2/2+Δt,只要选择合适的 Δt 使得其大于 Tsafe,ADC 就能在一个完全稳定、宽裕的窗口内,悠然自得地捕获没有寄生振铃干扰的直流母线电流 。而在周期的另一半,该极窄的脉冲被完全消除或进一步压缩。
这种技术有时被称为“双边开关”(Double Switching)或“自适应边缘移动”(Adaptive Edge Shifting)。尽管非对称 PWM 会在电机电流中引入微量的特定频段谐波(因为开关频率的偶次谐波不再被完美抵消),但在 100 kHz 这样极高的开关频率下,由非对称调制带来的微小纹波完全可以被电机的物理惯性和高频阻抗所吸收 。与因为丢失相电流反馈而导致的控制环路彻底瘫痪相比,这种折中在超高速驱动器的工程实战中不仅是可以接受的,更是绝境中唯一的生存法则 。
研发实战进阶:硬件级零延时交叉触发与相位前馈补偿
算法的理论再完美,在微控制器内也需要严丝合缝的工程实现。要在 10 μs 的开关周期内执行动态偏移,并获取微秒级精确的电流样本,工程师必须采用高度自动化的硬件外设机制,同时在算法链路中嵌入前向预估补偿模型。
基于底层寄存器级联的硬件 ADC 触发架构
在低速控制系统中,工程师习惯于在 PWM 计数器到达峰值或谷值时,触发一个 CPU 软件中断(ISR),在中断服务函数中使用软件指令启动 ADC 转换 。但在高速单电阻采样中,这是一种极其危险的做法。软件中断从产生到 CPU 保存现场并执行指令,存在难以确定的微秒级指令周期消耗;更严重的是,当总线被其他高优先级任务(如通信外设或故障保护)抢占时,这种软件抖动(Software Jitter)会使得本就逼仄的动态采样窗口直接偏移到高频振铃区或错误的矢量扇区中 。
解决之道在于利用现代电机控制专用 MCU(如 Texas Instruments 的 C2000 系列、NXP 的 S32/MagniV 或 STM32G4 系列)的片上硬件路由网络,实现“PWM 发生器与 ADC 触发的硬连线交叉联动” 。
实战中,工程师应当保留用于决定桥臂开关状态的主比较寄存器(如 CMPA 和 CMPB),同时动用额外的独立比较寄存器(如 CMPC 和 CMPD)专职负责生成 ADC 的起始转换信号(Start of Conversion, SOC)。在 FOC 的主循环中,算法在计算完动态偏移量后,会直接使用解析几何方程,预测出在一个周期内,分流电阻上电流最稳定、振铃完全衰减且距离下一次开关跳变最远的“黄金采样点”时间戳。
例如,对于重构 IA 和 IB 的采样点,微控制器会执行如下逻辑:
CMP_ADC1=CMPA_shifted+Tdeadtime+Tsettling_delay
CMP_ADC2=CMPB_shifted−TADC_S&H−Tmargin
这些计算出的时间戳被写入独立的比较寄存器中。当底层的定时器计数器滑过这些数值时,硬件逻辑电路会跨过 CPU 的干预,直接在内部总线上发送脉冲激发 ADC 进行单次或多次过采样(Oversampling)。这种硬件级联触发彻底消除了软件执行的不确定性,确保 ADC 能够以纳秒级的精度,在错综复杂的非对称 PWM 波形中,像外科手术般精准地切入最干净的相电流读数窗口 。
跨越转速陷阱:基于速度模型的超前角补偿技术
面对 100,000 RPM 时产生的高达 36∘ 乃至更高的控制环路相位滞后,单靠提高采样精度已无济于事,必须在软件观测器层面实施主动干预。实战建议在 FOC 算法的核心模块中引入一个“基于转速和系统固有延时的相位预估计项”(Speed-based Phase Pre-estimation / Lead-Angle Compensation)。
该补偿技术的核心思想是将滞后效应转化为控制算法内部的动态前馈角度预测。具体而言,无论是使用绝对值编码器还是无感观测器(如滑模观测器 SMO、模型参考自适应系统 MRAS 或高频注入 HFI)获取了当前时刻的转子位置 θmeas,算法都不会将其直接用于随后的坐标变换中 。
由于工程师可以精确统计出系统在当前硬件架构下,从 ADC 完成采样、运算 PI 回路到将 PWM 占空比推送到寄存器生效所需的总计绝对延迟时间 Ttotal_delay(通常为 1.5 到 2 个开关周期),控制器只需进行一次简单而优美的运动学积分预测:
θpre_est=θmeas+∫tt+Ttotal_delayωe(τ)dτ
由于在极短的开关周期(10 μs)内,电机的机械惯量极大,电角速度 ωe 可以近似视为恒定常数,上述积分可以简化为线性的前馈补偿项:
θused=θmeas+ωe×Ttotal_delay+Δθfilter
其中,Δθfilter 项是针对某些需要相位修正的滤波算法(如二阶广义积分器 SOGI 或延时滤波器)引入的群延迟所做的额外校准 。随后,FOC 模块使用这个超前的预测角度 θused 来执行反帕克(Inverse Park)变换 。通过这种超前角注入补偿,逆变器实际上是在“向未来输出”定子电压矢量。当这些电压由于物理延迟真正到达电机定子绕组时,飞速旋转的转子恰好转到了这个预估的角度位置上 。这使得定子磁链与转子磁链的相对夹角再次完美锁定在理论设计的最佳工作点(例如 MTPA 曲线),彻底消除了高温高转速下扭矩萎缩和系统振荡的隐患,保障了超高速主轴在极端转速下的丝滑运行与能效最大化 。
重塑时间维度:构建“开关时刻-采样有效点”多维动态映射表
在完美实施了动态偏移算法、硬件交叉触发机制以及超前角预测补偿之后,将这一套恢弘的理论架构落地到最终物理实现的最后一个屏障,便是宽禁带半导体自身的参数随温度和电流剧烈漂移的非线性特性 。在 100 kHz 的极限斩波世界里,如果采用静态固定常数来设定 ADC 的硬件触发延时,系统将在设备发热后立即陷入万劫不复的采样崩溃深渊 。
温漂特性导致的动态窗口偏移与撞车危险
如前文对基本半导体 BMF540R12KHA3 模块的数据剖析所揭示:从常温 25∘C 升至结温 175∘C 的过程中,其开通延迟 td(on) 会大幅缩短 30 ns,而关断延迟 td(off) 会延长 51 ns,反向恢复时间 trr 甚至会翻倍延长 26 ns 。同时,漏极电流 ID 的大小也会改变密斯电容的充电曲线,进而动态调制压摆率。
如果在固件代码中,工程师将从 CMPC 硬件寄存器触发到 ADC 开始采样的时间间隔 Twait 设定为一个死板的常数(例如 600 ns,这是在冷态下校准得到的最优平顶电流采样点),灾难将在系统全载发热后降临。由于 175∘C 高温下关断时间严重拖长,并且续流二极管的反向恢复电荷释放过程大幅向后推移,整个高频振铃(Ringing)区域会被延后几百纳秒 。原本在 600 ns 处平静如水的电流采样点,此刻将正好迎面撞上被高温推迟的剧烈 LC 寄生谐振波峰 。这种“撞车”将导致 MCU 采集到完全错误的虚假尖峰电流信号,进而使得电流 PI 环路产生错误的积分累加,最终诱发剧烈的飞车、失步甚至驱动模块直通炸机 。
“物理映射与查表插值”的软件架构设计
为了从根本上免疫这种半导体物理特性的热漂移,极具实战经验的研发架构师会彻底摒弃恒定延时配置,转而在数字控制器内核中植入一张反映器件物理规律的多维动态映射表(Multidimensional Lookup Table, LUT)。
该映射表的建立,强烈依赖于诸如基本半导体(BASiC)和青铜剑(Bronze)等一流硬件模块所具备的“稳定、可预测且一致性极高”的开关时间参数 。具体实施步骤如下:
实验标定与曲面拟合:在台架双脉冲测试(DPT)和高低温试验箱中,对选用的 SiC MOSFET 模块和配套驱动板进行离线扫频标定。测量不同母线电压(VDC,如 400V、800V)、不同相电流幅值(Iphase)和不同结温(Tvj)组合下的安全震荡平息时间边界。提取出确保 ADC 采样完全落在平滑区域所需的最小安全偏置时间面 Tsafe_delay=f(VDC,ID,Tvj) 。
片上实时结温估计:充分利用工业级模块(如 BMF 系列的 E2B 或 ED3 封装 )内集成的 NTC 温度传感器网络 。利用 NTC 采集到底板温度,再结合控制器内部预先离线烧录的瞬态热阻尼(Transient Thermal Impedance, Zth(j−c))高阶 Foster/Cauer 动态热模型,利用观测器实时解算出当前时刻 MOSFET 芯片内核的真实虚拟结温 Tvj 。
查表与双线性插值:在每一个极短的控制周期内,DSP 利用观测到的瞬态电流 ID、母线电压 VDC 和解算出的内核结温 Tvj,作为索引指针,进入二维或三维的 Lookup Table 中进行查表 。由于离线矩阵的点数有限,为了保证补偿参数的连续性和平滑性,软件会使用快速双线性插值(Bilinear Interpolation)或样条插值算法,输出精确到单个 CPU 时钟周期(如对于 200MHz 的 DSP 精度可达 5 ns)的动态偏移补偿值 。
底层触发寄存器的动态覆写:将上述计算得到的动态热补偿延时项,累加到原本的动态偏移算法基准采样点之上,生成最终极高保真度的绝对时刻变量,直接写入控制 ADC 硬件交叉触发的 CMPC/CMPD 寄存器中。
通过这种深度融合热动力学、半导体物理开关特性以及高速数字信号处理技术的交叉协同体系,系统仿佛赋予了微控制器“预知未来热状态”的智慧 。无论电机是在西伯利亚零下极寒环境中冷启动,还是在满载飙升至 175∘C 的高温极限狂飙,ADC 的采样触发点都能像自适应制导雷达一样,随着开关瞬间振铃区域的伸缩和游移,自动、精准、游刃有余地锁定在每一相电流最平坦、最纯净的波段之上 。这彻底拔除了悬在工程师头顶的高温采样失效隐患,赋予了 100,000 RPM 超高速驱动系统坚若磐石的工业级可靠性。
结论
在面向未来的电气化应用版图中,100,000 RPM 级别超高速电机的伺服驱动技术无疑代表了当代电力电子与先进电机控制领域的工程极限。为了在极致的体积约束与严苛的物料成本限制下,释放 SiC MOSFET 等第三代宽禁带半导体的澎湃高频潜能,基于直流母线的分流单电阻相电流采样方案已成为无可替代的战略性技术路径。然而,由高频斩波引发的狭窄盲区(Star Area)制约,以及高控制频率比下微小系统延时所放大的严重电流环相位漂移,构成了阻碍该项技术在工业界全面普及的核心壁垒。
本报告的深度拆解与理论推演证明,要攻克这一世界级的技术难题,单靠孤立的软件补丁或堆砌昂贵的模拟器件已无济于事,必须构建起一套打通半导体底层物理、数字调制硬件网络与高阶观测器算法的“全链路、软硬一体化防御协同体系”。
在宏观控制架构层,必须果断抛弃传统的全对称调制范式,实施采样时间点动态偏移算法与非对称双边开关补偿策略,通过局部牺牲微末的谐波性能,强行在不可观测的扇区边界拓荒出至关重要的生命级安全采样窗口。
在微观执行机构层,必须全面接管数字信号处理器内部的外设路由,运用高精度比较器(如 CMPC/CMPD)实现 PWM 扇区切换瞬间的无 CPU 介入硬件级 ADC 零延时交叉触发,彻底根除软件中断抖动对纳秒级极窄采样窗口的致命破坏。同时,在 FOC 的核心运算解算链路中强制嵌入基于转速与全系统绝对延时模型的相位预估计(超前角)补偿项 (θused=θmeas+ωe×Ttotal_delay) ,从而在时间穿梭的维度上强行拉平高达几十度的控制相位偏差,确保超高速下的定转子磁链完美解耦与效率极限爆发。
最为核心且考验工业级研发底蕴的是,在物理实现层面,必须依托诸如基本半导体(BASiC)和青铜剑驱动(Bronze)等具备优异参数一致性与极低纳秒级时钟抖动的顶级功率硬件,以其详实的非对称温漂特性(高温开通快、关断慢、恢复长)为数字基座,在底层构建起以母线电压、相电流及实时估算结温为坐标轴的精确“开关时刻-采样有效点”多维动态映射表。只有赋予微控制器自适应追踪、实时插值避让高频寄生谐振波峰的“温控时序智慧”,这套高速单电阻系统才能真正免疫工业现场中错综复杂的电磁干扰和深不可测的热漂移陷阱。
通过这套理论与工程实践的高度耦合,现代超高速驱动器方能在百万分之一秒的电光火石之间,精确剥离出承载着澎湃动力的相电流脉搏,确保微型涡轮与飞轮在 100,000 RPM 的物理极限转速下,依然展现出如丝般顺滑的扭矩响应与超越时代的绝对系统稳定性。
审核编辑 黄宇
-
驱动系统
+关注
关注
3文章
417浏览量
28671 -
电流采样
+关注
关注
2文章
58浏览量
17424
发布评论请先 登录


单电阻采样 小型高速吸尘 BLDC 马达 栅极驱动与调制电路技术详解

高压高速低边驱动器SiLM27531MAC-AQ,以30V耐压与5A强驱提升系统性能
过采样技术如何提高ADC的动态性能

如何解决Shunt电阻引发的伺服电流采样误差

国巨RL1206系列电流采样电阻,解决电子工程师电路设计难题
EV12AS200A的采样延迟微调如何提升相位精度?
高速焊接工艺中焊缝偏移问题的系统性解决方案
可编程电源如何确保电压和电流的精确度?
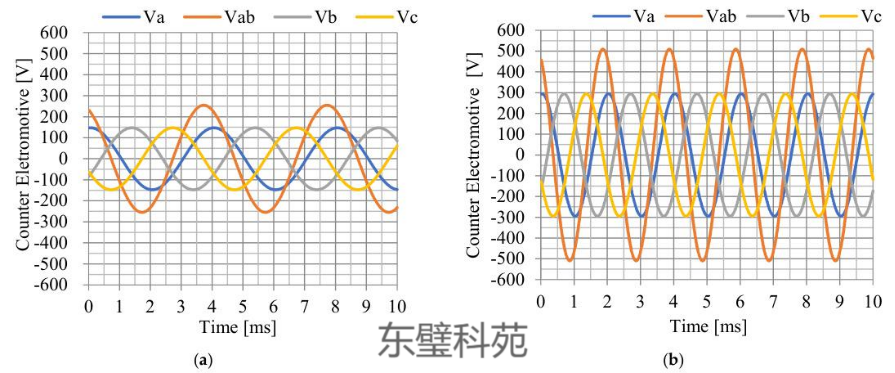
步进电机在高速运行时反电动势波形与其动态响应变化



评论