 单电阻采样 小型高速吸尘 BLDC 马达 栅极驱动与调制电路技术详解
单电阻采样 小型高速吸尘 BLDC 马达 栅极驱动与调制电路技术详解

手持式小型高速无刷吸尘器普遍采用 低压大电流、高转速(60k–120k r/min)、小体积、低成本、无感 FOC/方波驱动方案。为压缩 PCB 面积与物料成本,主流机型大量使用单电阻母线采样 + 分立/集成栅极预驱 + SVPWM/混合调制 架构。
本文从原理、拓扑、栅极回路、调制方式、单电阻采样时序、损耗、EMC、开机尖峰与量产隐患展开,给出适合小型高速吸尘 BLDC 的栅极驱动调制标准化电路设计。
一、应用边界与约束条件(吸尘器独有) 1)电压:3S–7S 锂电(11.1V–25.2V) 2)转速:超高线速、电频率高、换相快、死区敏感 3)电流:峰值 20–40A、导通损耗为主 4)空间:超薄板、密集器件、导热胶粘、风道出风、温升受限 5)控制:无感、无霍尔、只用母线单电阻、依靠采样重构三相 6)EMC:风道裸露、开关尖峰容易啸叫、辐射超标、手机耦合干扰 因此电路核心矛盾:栅极快与慢、损耗与EMC、采样开窗与死区、体积与散热。
二、整体拓扑:单电阻采样 + 六管全桥 + 预驱栅极调制
2.1 系统框图 锂电输入→防反接/TVS→母线滤波 MLCC→六管 MOS 全桥→高速 BLDC MCU→PWM 逻辑→预驱栅极电路→上下桥 MOS 母线低端单电阻→运放放大→ADC→电流重构→限流/闭环/FOC
2.2 为什么选“单电阻”
- 只用 1 颗低阻大功率采样电阻(0.5mΩ–5mΩ)
- 成本最低、走线最简、占面积最小
- 缺点:需要配合调制开窗、时序对齐、盲区补偿、死区拟合 适合:小高速吸尘、方波六步、低成本无感 FOC。
三、栅极驱动基础回路(决定温升、炸管、EMC、啸叫)
3.1 典型集成预驱拓扑(吸尘器主流) 三片半桥 / 一片三桥预驱 + 自举电路 - 每相上桥:自举二极管 + 自举电容(1μF X7R)
- 下桥:直接 12V 轨驱动
- 内置死区、过流锁定、UVLO、互锁
3.2 栅极等效模型关键参数
- Qg:MOS 总栅荷(越小越适合高速)
- Cgs / Cgd:米勒平台(尖峰、直通根源)
- Rds(on):决定持续温升
- dv/dt / di/dt:决定 EMC
3.3 栅极电阻二分法(工程落地) 标准做法:分开开通电阻 / 关断电阻
- 开通 Rg_on:抑制 di/dt、压低尖峰、降EMC(10Ω–22Ω)
- 关断 Rg_off:偏小、加快泄放、防米勒误导通(2Ω–6Ω)
- 栅极并联 100p–220p:抑制栅振荡、降啸叫 禁忌
- 只用一颗电阻:要么热、要么吵、要么炸
- 电阻太小:尖峰炸 EMI、打单电阻采样
- 电阻太大:开关损耗爆、MOS 热死
四、高速吸尘器适合哪一种调制方式(核心选型)
4.1 常见三种 PWM 调制对比 1)双边对称调制(H-PWM-L-PWM)
- 采样窗口碎、盲区大、单电阻最难采、发热最大 2)单边低侧调制(固定上桥、调制下桥,常用六步方波)
- 窗口稳定、单电阻最好采、逻辑最简、适合高速吸尘 3)SVPWM 居中调制(FOC)
- 利用率高、转矩平滑、噪音低、但对齐时序复杂 量产吸尘器结论
- 低端:单边下桥调制 + 六步方波 + 单电阻
- 高端:分段 SVPWM + 移窗采样 + 单电阻无感 FOC
4.2 死区匹配(高速最容易忽视) 高速电频高,死区过大:转矩塌、弱抖、效率掉、热风 死区过小:米勒直通、相间炸桥 工程:动态死区 低速:1μs–2μs 高速:400ns–800ns
五、单电阻采样对齐调制:怎么采、什么时候采、避开哪里 ### 5.1 采样位置 下桥负极串联一颗功率电阻→放大→ADC 只看到母线合成电流,看不到天然相电流
5.2 采样必须满足两个条件 1)当前矢量必须两相导通,开窗足够 2)避开:死区、边沿、尖峰、米勒、开关抖动
5.3 调制配合(电路写法) PWM 需要拉出 最小有效采样时间(Minimum Duty Valid Width)
- 窄占空跳过、插值补齐
- 居中翻转、对齐采样沿
- 避开自举刷新沿
5.4 容易出现的硬件故障点
- 放大运放摆率不够:高速采糊→过流误保护、忽快忽慢
- 采样走线夹在功率回路:耦合尖峰→跳动、限流乱跳
- 电阻靠近 MOS:温升漂→零点漂移、低端无力 PCB:采样必须差分、短、包围地、远离三相、远离栅线
六、完整推荐参考电路(文字原理图,适合写文档) 6.1 电源链 - BV → 12V DC-DC(给预驱)
- 12V → 3.3V LDO(MCU、运放) 6.2 预驱 & 自举 每相:Boot Diode + 1μF Boot Cap + 栅二分电阻 + 小滤波电容
6.3 功率全桥 6 颗低压 N 管、低 Rds、高 Qg耐受、60V 余量
6.4 单电阻放大 0.5–2mΩ → 差分运放 20–50 倍 → RC二阶滤波 → ADC ### 6.5 BEMF 无感分压 三相分压钳位 RC → 给到 ADC/比较,做零交叉换相
6.6 EMC 附属
- 入口共模电感
- 母线附近高低搭配 MLCC + 低ESR - 相尖峰小型 RC/Snubber(轻量、不降效率)
七、损耗分解:为什么吸尘器一跑就热 1)导通损耗:单电阻 + MOS 本体(最大) 2)开关损耗:高速、调制频繁、栅速不配 3)死区损耗:高速放大 4)采样放大静态损耗(小) 优化:适度加大栅开通阻、动态死区、单边调制压低翻转次数
八、量产典型问题对照(电路 + 调制双向定位)
| 现象 | 表象 | 根因(栅/调制/采样) |
| 起步抖、起不来 | 低频抖动 | 死区大 + 采样盲区 + 调制不对齐 |
| 跑久限流、忽快忽慢 | 随机降速 | 采样温漂、走线耦合、尖峰打进ADC |
| MOS 容易炸 | 满载瞬炸 | 米勒直通、栅阻不合理、无互锁、残压 |
| 风声尖啸、刺耳 | 高频异音 | 栅太快、双边调制、振荡、EMC差 |
| 吸力不够、发热大 | 效率差 | 死区偏大、开关次数太多、双边翻转 |
九、标准化设计要点总结(适合放进工艺/规范) 1)驱动:预驱 + 分开开通关断栅阻 + 小消振电容 + 规整自举 2)调制:高速优先单边调制;FOC做移窗、扩窗对齐 3)采样:单电阻差分走线、二阶滤波、避开边沿死区、预留最小开窗 4)保护:硬件快速关断 + 软件二次锁死 + UVLO + BEMF堵转 5)PCB:功率环极短、栅线独立、采样隔离、一地收敛 6)热EMC:轻量Snubber、合理栅速、动态死区、原装导热复位
审核编辑 黄宇
-
BLDC
+关注
关注
220文章
944浏览量
100605 -
栅极驱动
+关注
关注
8文章
225浏览量
23982
发布评论请先 登录
融合 FOC 算法与 EMC 优化的高速吸尘器马达驱动板实现方案
扫地机 BLDC 马达驱动板:FOC 控制、保护与信号系统详解
高速高速吸尘器BLDC马达驱动板硬件架构与算法实现
吸尘器马达驱动板的高效率、低噪声控制技术研究
吸尘器高速无刷马达驱动板设计与控制策略研究-
吸尘器用高动态响应 BLDC 驱动系统设计与实现
吸尘器 BLDC 马达驱动板设计与高精度位置传感方案-艾毕胜电子
吸尘器马达驱动系统硬件电路设计(有刷/BLDC兼容方案)
吸尘器用 BLDC 马达驱动板关键电路设计

探索MAX15024:高性能单/双路高速MOSFET栅极驱动器
从芯片到方案,灵活因应多元 BLDC 驱动应用需求
UCC2753x系列单通道高速栅极驱动器:特性、应用与设计要点详解
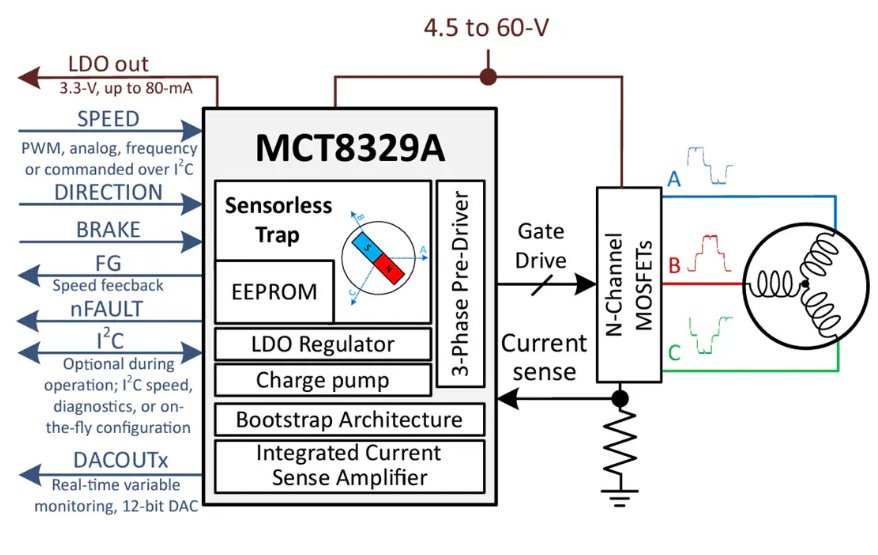
MCT8329A高速无传感器梯形控制三相BLDC栅极驱动器技术解析
智能吸尘器 BLDC 电机 FOC/SVPWM 驱动控制优化研究:解锁清洁新境界



评论