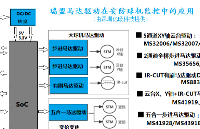
 安防云台马达驱动板 MOS 管逆变驱动电路设计
安防云台马达驱动板 MOS 管逆变驱动电路设计

安防云台 MOS 管逆变驱动板电路作为动力核心,需满足宽压输入(12~24V)、大电流输出(5~10A)、宽温工作(-40℃~85℃)、24 小时连续运行四大核心指标。
本文针对无刷直流电机(BLDC)三相全桥逆变拓扑,从拓扑选型、MOS 管选型、栅极驱动优化、保护机制设计、抗干扰与 PCB 布局五大维度,结合安防场景的电磁兼容(EMC)与可靠性要求,提供完整的工程化设计方案,实现定位精度 ±0.05°、运行噪声≤45dB (A)、MTBF≥50000 小时的性能目标,为高清监控、智能跟踪等安防云台应用提供技术支撑。
一、引言
安防云台通过多轴 BLDC 电机协同实现 360° 无死角监控、目标自动跟踪,其 MOS 管逆变驱动电路的性能直接决定电机控制精度、动态响应速度与系统可靠性。安防场景的特殊性对驱动电路提出三大核心挑战:一是户外环境的宽温波动(-40℃~85℃)导致器件参数漂移,需保证驱动稳定性;二是监控现场电磁干扰复杂(如变频器、高压设备),需强化抗干扰设计;三是 24 小时连续运行要求低损耗、高可靠性,避免故障停机。
本文基于三相全桥逆变拓扑,围绕 “高效驱动、精准控制、全场景保护” 设计理念,重点解决 MOS 管开关损耗、栅极驱动不足、EMI 干扰三大痛点,形成适配安防云台的工程化设计方案。
二、逆变拓扑架构选型与设计
安防云台 BLDC 电机驱动主流采用三相全桥逆变拓扑,通过 6 颗 MOS 管的有序通断,将直流电源逆变为三相正弦交流电,驱动电机定子绕组产生旋转磁场,实现精准调速与定位。
2.1 拓扑核心架构
三相全桥逆变电路由上桥臂 3 颗 P 沟道 MOS 管与下桥臂 3 颗 N 沟道 MOS 管组成,每相桥臂对应电机一相绕组(U/V/W),核心架构如下:
电源端:输入电压 VIN(12~24V)经滤波后连接桥臂中点,支持宽压适配;
控制端:MCU 输出的 PWM 信号经栅极驱动芯片放大后,控制 6 颗 MOS 管的导通与关断;
输出端:三相桥臂中点连接电机 U/V/W 绕组,输出相位差 120° 的正弦交流电;
采样端:下桥臂串联采样电阻,实现三相电流采样,为 FOC 磁场定向控制提供数据支撑。
2.2 拓扑工作原理
基于 SVPWM(空间矢量脉冲宽度调制)算法,通过控制 MOS 管导通时序与占空比,实现电压与频率的精准调节:
每个开关周期内,6 颗 MOS 管按特定逻辑组合导通(如 U 相上管 + V 相下管 + W 相下管),形成空间电压矢量;
通过切换不同电压矢量的导通时间,合成逼近正弦波的输出电压,降低电机转矩脉动;
稳态运行时,开关频率设定为 10~20kHz,兼顾低噪声与高效率(开关损耗与导通损耗平衡)。
2.3 拓扑优势适配安防场景
高效率:同步整流设计 + 低 RDS (on) MOS 管,逆变效率≥92%,减少发热,适配 24 小时连续运行;
高精度:SVPWM 算法支持细分控制,定位精度可达 ±0.05°,满足高清监控跟踪需求;
强鲁棒性:全桥拓扑冗余设计,单颗 MOS 管故障时可通过算法降级运行,提升系统可靠性。
三、核心器件选型(MOS 管 + 栅极驱动芯片)
器件选型直接决定驱动电路的效率、可靠性与抗干扰能力,需结合安防场景的宽温、大电流、长寿命需求,重点关注参数裕量与环境适应性。
3.1 MOS 管选型
3.1.1 关键参数要求
耐压值(VDS):≥50V(输入电压 12~24V,留 2 倍以上裕量,应对电源浪涌);
导通电阻(RDS (on)):≤0.05Ω@VGS=10V(降低导通损耗,减少发热);
最大漏极电流(ID):≥20A(连续输出电流 5~10A,留 2 倍裕量,应对峰值电流);
结温范围(TJ):-55℃~150℃(适配 - 40℃~85℃工作环境,留足够温降裕量);
开关速度:tr≤50ns、tf≤50ns(快速开关,降低开关损耗,适配 10~20kHz 开关频率)。
3.1.2 推荐型号与选型对比
| 型号 | 类型 | VDS(V) | RDS(on)(mΩ) | ID(A) | TJ(℃) | 适配场景 |
| IRF3205 | N 沟道 | 55 | 8 | 110 | -55~150 | 中功率云台(5A 输出) |
| STP75NF75 | N 沟道 | 75 | 7 | 75 | -55~150 | 大功率云台(8A 输出) |
| FDP8870 | P 沟道 | 60 | 12 | 42 | -55~150 | 上桥臂专用(互补驱动) |
3.1.3 选型注意事项
上桥臂优先选用 P 沟道 MOS 管(无需自举电路,简化设计),下桥臂选用 N 沟道 MOS 管(导通电阻更小);
需匹配栅极电荷(Qg):Qg≤100nC(减少栅极驱动电流需求,降低驱动芯片损耗);
封装选择:TO-220(中功率)或 TO-263(大功率),支持散热片安装,提升热扩散能力。
3.2 栅极驱动芯片选型
3.2.1 核心功能要求
驱动能力:输出峰值电流≥2A(确保 MOS 管快速开关,抑制米勒效应);
隔离特性:隔离电压≥2.5kVrms(阻断功率回路与控制回路干扰,提升 EMC 性能);
保护功能:集成死区控制(避免上下桥臂直通)、过温保护(OTP)、欠压锁定(UVLO);
响应速度:传输延迟≤50ns(适配 20kHz 开关频率,保证 PWM 信号完整性)。
3.2.2 推荐型号与技术亮点
高速隔离驱动:TI UCC21520(隔离电压 5kVrms,传输延迟 25ns,输出电流 2.5A,集成死区控制);
非隔离驱动:IR2104(低成本,输出电流 1A,支持自举供电,适配中小功率场景);
车规级驱动:ADI ADUM1400+IR2110(组合方案,隔离 + 强驱动,适配宽温环境)。
3.2.3 驱动电路优化设计
栅极限流电阻:串联 10~22Ω 电阻,抑制栅极电流尖峰,减少开关振铃;
栅极并联电容:并联 100pF 陶瓷电容,稳定栅极电压,抑制 EMI 干扰;
自举电路设计(上桥臂 N 沟道 MOS 管场景):自举电容选用 1μF/25V 高频陶瓷电容,串联 10Ω 限流电阻,自举二极管选用快恢复二极管(FR107),确保高侧管充分导通。
四、保护机制设计(安防场景高可靠核心)
安防云台需 24 小时连续运行,保护电路需覆盖过流、过温、过压、欠压、短路五大故障场景,确保器件不损坏、系统不宕机。
4.1 过流保护(OCP)
4.1.1 实现方案:采样电阻 + 运放 + 比较器
采样电阻:下桥臂每相串联 0.05Ω/2512 封装精密合金电阻(温漂<50ppm/℃),采样电压 VCS=Iout×Rsampling;
信号调理:采样电压经低失调运放(INA128)放大 10 倍,滤除高频噪声;
保护逻辑:放大后的信号输入比较器(LM393),与基准电压(如 0.5V 对应 10A)比较,过流时立即切断栅极驱动信号,逐周期限制电流;
恢复机制:电流恢复正常后,通过 RC 延时电路(10kΩ+1μF)实现软恢复,避免冲击。
4.2 过温保护(OTP)
4.2.1 双级保护方案
初级保护:MOS 管内置温度传感器(部分型号支持),结温超过 120℃时,通过驱动芯片反馈信号降低输出电流;
次级保护:PCB 功率区粘贴 NTC 热敏电阻(10kΩ/3950),通过分压电路连接 MCU ADC,温度超过 85℃时,MCU 发出降额指令,温度超过 100℃时直接关断输出;
防抖动设计:设置 5℃回差温度,避免温度临界点反复触发保护。
4.3 过压 / 欠压保护(OVP/UVLO)
4.3.1 过压保护
电路设计:输入电压经分压电阻(100kΩ+10kΩ)采样,连接比较器(LM339),基准电压由 TL431 提供(2.5V);
保护阈值:当输入电压>28V 时,比较器翻转,触发 TVS 管(SMBJ33CA)钳位,同时切断栅极驱动;
冗余设计:并联压敏电阻(39V),吸收浪涌电压,保护 MOS 管不受击穿。
4.3.2 欠压保护
保护阈值:当输入电压<10V 时,驱动芯片 UVLO 功能触发,关断输出,避免 MOS 管在低压下不完全导通导致烧毁;
延时启动:通过 RC 延时电路(22kΩ+10μF)实现 500ms 软启动,抑制启动冲击电流。
4.4 输出短路保护(SCP)
4.4.1 快速响应方案
检测机制:通过采样电阻监测输出短路时的峰值电流(通常为额定电流的 3 倍);
保护逻辑:比较器快速响应(响应时间<1μs),立即关断所有 MOS 管,避免持续大电流烧毁器件;
重试机制:短路解除后,间隔 1s 自动重试,重试 3 次失败则锁定故障,需手动复位。
五、抗干扰与 PCB 布局设计(适配安防电磁环境)
安防场景电磁干扰复杂,PCB 布局与抗干扰设计直接决定驱动电路的稳定性与 EMC 性能,核心原则是 “强弱电隔离、大电流回路最小化、接地优化”。
5.1 分区布局设计
功率区:MOS 管、采样电阻、输入滤波电容集中布置,区域面积≥5cm×5cm,铜箔厚度≥2oz(承载大电流);
驱动区:栅极驱动芯片、光耦、自举电路紧邻 MOS 管,驱动信号路径≤10mm,减少寄生电感;
控制区:MCU、ADC、基准源远离功率区(间距≥5mm),避免电磁耦合干扰;
隔离区:功率地与信号地之间设置 3mm 宽隔离带,无铜箔跨越,阻断地环路干扰。
5.2 布线优化
大电流布线:U/V/W 相线铜箔宽度≥5mm(承载 10A 电流),采用弧形布线,避免直角(减少电磁辐射);
驱动信号布线:采用差分走线(线宽 8mil,间距 8mil),长度差≤3mm,屏蔽层接地;
采样信号布线:采样电阻至运放的走线长度≤15mm,远离功率线(间距≥5mm),采用屏蔽布线;
电源布线:输入电源采用星形拓扑,滤波电容紧贴 MOS 管电源引脚(距离≤10mm),缩短供电回路。
5.3 接地系统设计
单点共地:功率地(PGND)与信号地(AGND)在电源输入处单点连接(接地点面积≥10mm²),避免地电流交叉干扰;
模拟地与数字地分离:ADC、运放的模拟地单独布线,通过 0Ω 电阻单点连接至 AGND,减少数字电路噪声干扰;
接地铜箔:控制区采用网格接地(铜箔网格 5mm×5mm),功率区采用大面积铺铜接地,降低接地阻抗。
5.4 EMC 优化设计
输入滤波:采用 “共模扼流圈 + 差模电容 + 共模电容” 组合滤波,共模扼流圈选用≥1mH,差模电容选用 470μF 电解电容 + 0.1μF 陶瓷电容;
屏蔽设计:功率区采用金属屏蔽罩封装,屏蔽罩接地,抑制电磁辐射;
吸收电路:MOS 管源漏极并联 RC 吸收电路(10Ω+1000pF),抑制开关尖峰电压,降低 EMI。
六、工程实现与性能验证
6.1 关键性能指标
| 指标类型 | 性能参数 |
| 输入电压范围 | 12~24V DC |
| 连续输出电流 | 5~10A |
| 逆变效率 | ≥92%(满载) |
| 开关频率 | 10~20kHz |
| 定位精度 | ±0.05° |
| 运行噪声 | ≤45dB(A) |
| 工作温度范围 | -40℃~85℃ |
| MTBF(平均无故障时间) | ≥50000 小时 |
| EMC 等级 | 符合 EN 55032 Class B |
6.2 安防场景适配验证
宽温测试:在 - 40℃低温箱与 85℃高温箱中连续运行 72 小时,输出电流波动≤5%,无保护误触发;
抗干扰测试:在 3m 距离处使用 200V/m 电磁辐射干扰源,驱动电路正常工作,电机无抖动;
长寿命测试:24 小时连续运行 30 天,MOS 管结温稳定在 60℃以下,无器件损坏或性能衰减。
安防云台 MOS 管逆变驱动电路的设计需围绕 “高可靠性、宽环境适应、强抗干扰” 核心诉求,通过三相全桥拓扑实现高效功率转换,结合精准的栅极驱动设计与全场景保护机制,确保 24 小时连续稳定运行。器件选型时需预留足够参数裕量,适配宽温与大电流需求;PCB 布局与抗干扰设计需严格遵循 “强弱电隔离、大电流回路最小化” 原则,提升 EMC 性能。
审核编辑 黄宇
-
马达
+关注
关注
1文章
881浏览量
65427 -
驱动板
+关注
关注
21文章
288浏览量
33654
发布评论请先 登录
智能云台马达驱动板功率电路及信号调理电路设计
风扇用无刷马达驱动板电路设计与关键技术
高平稳性云台马达驱动板控制算法优化
吸尘器用 BLDC 马达驱动板关键电路设计





评论