 车载网关测试:CAN/CANFD收到信号后,通过以太网转发给座舱域控制器,交联验证怎么做?
车载网关测试:CAN/CANFD收到信号后,通过以太网转发给座舱域控制器,交联验证怎么做?

车载网关测试:CAN/CANFD收到信号后,通过以太网转发给座舱域控制器,交联验证怎么做?
文 / 宏控软件 技术团队
在智能网联汽车的电子电气架构中,车载网关(CGW)是跨域通信的核心枢纽。随着域集中式架构的普及,网关与域控制器之间的通信方式正在发生深刻变革。
一条典型的车内通信链路是这样的:
车身域控制器检测到车门状态变化 → 通过CAN/CANFD总线发送信号 → 车载网关接收CAN报文 → 网关根据路由表判断目标域 → 将数据封装为以太网帧(SOME/IP或DoIP)→ 通过车载以太网转发给座舱域控制器 → 座舱域控制器更新中控屏上的车门状态显示

这条链路跨越了CAN/CANFD总线、网关路由逻辑、SOME/IP协议转换、车载以太网通信、域控制器处理多个技术环节。任何一个环节的数据错误、时序偏差或协议转换失败,都会导致“门开了,屏幕没显示”的尴尬场景。
然而在实际测试中,CAN总线团队验证报文接收,网关团队验证路由表,以太网团队验证SOME/IP通信,座舱团队验证显示逻辑。每个环节都“通过”了,但当车门真正打开时,中控屏却纹丝不动。问题出在哪里?—— 交联验证的缺失 。
一、 车载网关技术架构与交联验证需求
在当代整车电子电气架构中,车载网关通常连接多个总线网络和以太网域:
| 接口类型 | 连接对象 | 数据流向 | 交联验证需求 |
|---|---|---|---|
| CAN/CANFD | 车身域、动力域、底盘域 | 接收/发送 | 报文是否正确接收?ID和信号是否符合DBC? |
| LIN | 门窗、座椅、车灯等子节点 | 接收/发送 | 信号是否正确解析? |
| 车载以太网 | 座舱域控制器、自动驾驶域 | 双向转发 | SOME/IP协议是否正确?数据封装是否完整? |
| 以太网(DoIP) | 诊断接口、OTA服务器 | 双向通信 | 诊断协议是否合规? |
一条完整的信号转发链路,涉及这些层次的协同:
- CAN报文接收 :网关CAN控制器接收总线报文,通过DMA存入缓冲区
- 路由表查询 :网关主控根据报文ID查询路由表,确定目标域
- 协议转换 :将CAN信号映射为SOME/IP服务接口的数据格式
- 以太网封装 :将SOME/IP数据封装为以太网帧,通过PHY发送
- 域控制器处理 :座舱域控制器接收SOME/IP消息,更新应用状态
二、 车载网关测试的四大挑战
挑战一:CAN到SOME/IP的数据一致性验证
网关的核心功能是“协议转换”——将CAN报文中的信号正确映射为SOME/IP服务的数据格式:
- CAN信号(如车速值、车门状态)是否正确提取?
- 数据类型转换是否准确?(小端/大端、有符号/无符号、单位换算)
- SOME/IP服务ID、方法ID、数据格式是否符合服务设计规范?
- 序列化/反序列化是否正确?
分离测试只能验证“CAN报文收到了”和“以太网有数据发出”,但无法验证“以太网发出的数据”是否等于“CAN收到的信号”。
挑战二:路由表的正确性与完整性
网关的路由表定义了哪些报文需要转发到哪个以太网域:
- 路由规则是否正确?(如ID 0x210应转发到座舱域)
- 路由规则是否有遗漏?(关键报文是否被丢弃)
- 多目标转发时,报文是否正确复制到多个域?
挑战三:SOME/IP协议的正确性
在面向服务的架构中,SOME/IP是域间通信的核心协议:
- 服务发现(Service Discovery)是否正确响应?
- 事件组(Event Group)订阅和发布是否正确?
- 方法调用(Method Call)的请求-响应是否匹配?
挑战四:端到端延迟与时序要求
从CAN报文接收到以太网转发完成的延迟,直接影响系统的实时性:
- 网关处理延迟是否在设计要求内(通常<2ms)?
- 以太网交换机转发延迟是否可控?
- 多路转发时,最坏情况下的延迟是否满足功能安全要求?
三、 UTP平台:车载网关交联验证的工程化方案
宏控天工-UTP企业级测试平台通过CAN/CANFD分析、SOME/IP协议验证、以太网分析、时序同步引擎四大能力,将CAN接收到以太网转发的完整链路纳入统一测试体系。
3.1 CAN/CANFD总线仿真与验证
UTP平台支持CAN/CANFD总线的精细化测试:
| 能力 | 说明 |
|---|---|
| 报文注入 | 向CAN总线注入自定义报文,模拟车身域、动力域的信号输入 |
| DBC解析 | 导入DBC文件,自动解析CAN信号值,验证网关是否正确提取 |
| 负载模拟 | 模拟高负载场景,验证网关在高总线负载下的转发能力 |
| 错误注入 | 注入错误帧、位填充错误,验证网关的容错和过滤机制 |
3.2 SOME/IP协议验证
UTP平台支持SOME/IP协议的深度解析与验证:
| 能力 | 说明 |
|---|---|
| 服务接口验证 | 根据ARXML服务设计文件,验证SOME/IP消息的Service ID、Method ID、数据格式 |
| 服务发现验证 | 捕获服务发现报文,验证Offer/Subscribe/SubscribeACK流程 |
| 事件验证 | 验证事件组订阅后,网关是否正确发布事件消息 |
| 方法调用验证 | 验证远程方法调用的请求-响应匹配 |
3.3 车载以太网分析
UTP平台支持车载以太网的全面分析:
| 能力 | 说明 |
|---|---|
| 帧捕获与解析 | 捕获以太网帧,解析VLAN、IPv4/IPv6、UDP/TCP、SOME/IP多层协议 |
| 时间戳 | 纳秒级时间戳,精确记录每帧的收发时刻 |
| 流量统计 | 监控以太网端口流量、带宽利用率 |
| 错误注入 | 注入CRC错误、VLAN错误,验证网关容错能力 |
3.4 数据一致性自动比对
UTP平台的核心能力是 自动比对CAN输入与SOME/IP输出的一致性 :
| 比对项 | 验证方法 |
|---|---|
| 信号值匹配 | CAN解析的信号值 → SOME/IP消息中提取对应字段 → 自动比对是否一致 |
| 数据类型转换 | 验证转换规则(小端/大端、单位换算、缩放因子)是否正确执行 |
| 多信号封装 | 验证多个CAN信号是否正确封装到同一SOME/IP消息中 |
3.5 时序同步与端到端延迟分析
UTP平台的时序引擎支持多通道同步采集:
| 事件节点 | 时间戳来源 | 验证内容 |
|---|---|---|
| CAN报文发送 | 测试脚本/CAN注入 | 报文发出时刻 |
| CAN报文接收 | CAN总线捕获 | 网关接收完成时刻 |
| 路由表查询完成 | 网关GPIO/UART日志 | 路由决策完成时刻 |
| SOME/IP封装 | 网关内部状态 | 协议转换完成时刻 |
| 以太网帧发送 | 以太网捕获 | 数据发出时刻 |
| 座舱域接收 | 以太网捕获 | 目标端接收时刻 |
所有事件以统一时间基准对齐,自动计算:
- CAN接收到以太网转发的延迟
- 协议转换处理延迟
- 端到端全链路延迟
3.6 路由表自动化验证
UTP平台支持路由表的自动化测试:
| 验证项 | 方法 |
|---|---|
| 路由正确性 | 注入特定ID的CAN报文,验证是否转发到预期的以太网域(座舱域/自动驾驶域) |
| 路由完整性 | 遍历所有路由规则,验证每条规则都被正确执行 |
| 多目标转发 | 注入需转发到多个域的报文,验证多路转发正确性 |
| 负向测试 | 注入未定义路由的报文,验证网关是否正确丢弃或记录 |
四、 典型场景:车门状态转发交联测试
以下是一个“车门状态变化→CAN→网关→SOME/IP→座舱域”的完整交联测试用例:
| 时序 | 操作/事件 | 验证内容 | 测量接口 |
|---|---|---|---|
| T0 | CAN注入车门状态报文(ID 0x210,数据:左前门开启) | 记录注入时刻 | CAN注入 |
| T0+50μs | 网关CAN控制器接收 | 捕获CAN报文,验证接收成功 | CAN捕获 |
| T0+80μs | 路由表查询 | 捕获网关GPIO(路由完成标志) | GPIO |
| T0+150μs | SOME/IP封装 | 验证服务ID、方法ID、数据格式 | 以太网捕获 |
| T0+200μs | 以太网帧发送 | 捕获以太网帧,验证VLAN、IP地址 | 以太网捕获 |
| T0+300μs | 座舱域接收(模拟) | 验证SOME/IP消息正确接收 | 以太网捕获 |
| 全过程 | 数据一致性比对 | 比对CAN输入的车门状态与SOME/IP输出的状态 | 数据比对引擎 |
该用例执行时间约300μs,自动验证了从CAN接收到以太网转发的数据一致性和时序关系。
五、 典型场景:多CAN报文并发转发与SOME/IP封装测试
网关需要同时处理多个CAN报文,测试需要验证转发顺序和SOME/IP封装正确性:
| 测试步骤 | 操作 | 验证内容 | 测量接口 |
|---|---|---|---|
| 1 | CAN注入高优先级报文(ID 0x100,发动机转速) | 记录注入时刻 | CAN注入 |
| 2 | CAN注入低优先级报文(ID 0x500,车窗状态) | 记录注入时刻(间隔10μs) | CAN注入 |
| 3 | 捕获以太网帧 | 验证高优先级报文先被封装和发送 | 以太网捕获 |
| 4 | 验证SOME/IP消息顺序 | 验证以太网帧中SOME/IP消息的顺序 | 以太网捕获 |
| 5 | 测量转发延迟 | 计算两路报文的转发时间差 | 时序引擎 |
六、 典型场景:SOME/IP服务发现与订阅测试
在面向服务的架构中,网关作为服务提供者,需要正确处理服务发现:
| 测试步骤 | 操作 | 验证内容 |
|---|---|---|
| 1 | 模拟座舱域发送Find Service消息 | 捕获网关响应 |
| 2 | 验证Offer Service消息 | 验证Service ID、Instance ID、Method列表 |
| 3 | 模拟座舱域发送Subscribe Event Group | 验证SubscribeACK响应 |
| 4 | CAN注入事件触发报文 | 验证网关是否通过事件消息发布数据 |
| 5 | 验证事件消息格式 | 验证事件ID、数据格式符合ARXML定义 |
七、 典型场景:路由表正确性自动化验证
| 测试步骤 | 操作 | 验证内容 |
|---|---|---|
| 1 | 加载DBC文件和路由表配置 | 自动生成测试用例 |
| 2 | 遍历路由表中的每一条规则 | 注入对应ID的CAN报文 |
| 3 | 验证报文被转发到预期以太网域(座舱域/自动驾驶域/诊断域) | 自动比对实际转发域与预期 |
| 4 | 验证SOME/IP服务接口正确性 | 验证Service ID、Method ID与路由表一致 |
| 5 | 验证未定义路由的报文被丢弃 | 注入未定义ID,验证无以太网帧发出 |
| 6 | 生成路由表验证报告 | 标注通过率、失败项 |
八、 从“接口测试”到“交联验证”的范式转变
车载网关研发团队的传统测试方式是:
- CAN团队用总线分析仪验证报文接收
- 路由团队用手工或脚本验证路由表
- SOME/IP团队用协议分析仪验证服务接口
- 以太网团队用网络分析仪验证通信
- 座舱团队用仿真环境验证应用逻辑
这种模式的问题在于:
- 无法验证数据一致性 :CAN输入的信号与SOME/IP输出的数据是否一致,无法自动验证
- 交联时序无法测量 :CAN接收到以太网转发的延迟无法精确获得
- SOME/IP协议验证不全面 :服务发现、订阅/发布流程难以与CAN信号关联
- 回归测试成本高 :每次路由表或服务接口变更都需要多个团队协同验证
UTP平台提供的交联验证方案,将CAN、SOME/IP、以太网纳入同一测试体系,对于车载网关研发团队而言,这意味着:
- 更高的数据准确性 :自动验证CAN信号到SOME/IP消息的映射正确性
- 更精确的时序测量 :微秒级精度的端到端延迟测量
- 更全面的协议验证 :服务发现、订阅/发布、方法调用全覆盖
- 更高效的回归测试 :一键执行全链路交联用例
九、 总结:网关的可靠性,体现在协议转换的一致性
车载网关作为车内通信的“交通枢纽”,其可靠性不取决于CAN总线收得有多快,也不取决于以太网带宽有多高,而取决于 从CAN接收到的信号,能否准确、及时、完整地转换为SOME/IP服务,并通过以太网转发到目标域 。
“CAN报文收到了”不等于“SOME/IP消息发了”,“以太网帧发了”不等于“座舱域收到了正确的服务数据”。只有从CAN输入到SOME/IP输出的完整链路都通了,网关才算真正可靠。
UTP平台提供的交联验证能力,正是为了确保这条链路始终可靠。当您能够在一个平台上,从CAN报文追踪到SOME/IP消息,从路由表验证到以太网帧分析——那时候,您才能真正确信:每一辆搭载该网关的汽车,跨域通信都能准确、及时、可靠地运行。
审核编辑 黄宇
-
以太网
+关注
关注
41文章
6159浏览量
181511 -
CAN
+关注
关注
59文章
3093浏览量
473395 -
网关
+关注
关注
9文章
6919浏览量
56541
发布评论请先 登录
车载以太网,速度直指Tbps?


汽车域控制器通讯测试主板选型指南:破解多协议测试核心难题
GL5450助力以太网记录解决方案

汽车CAN/以太网一体化测试板:虹科多协议车载测试解决方案
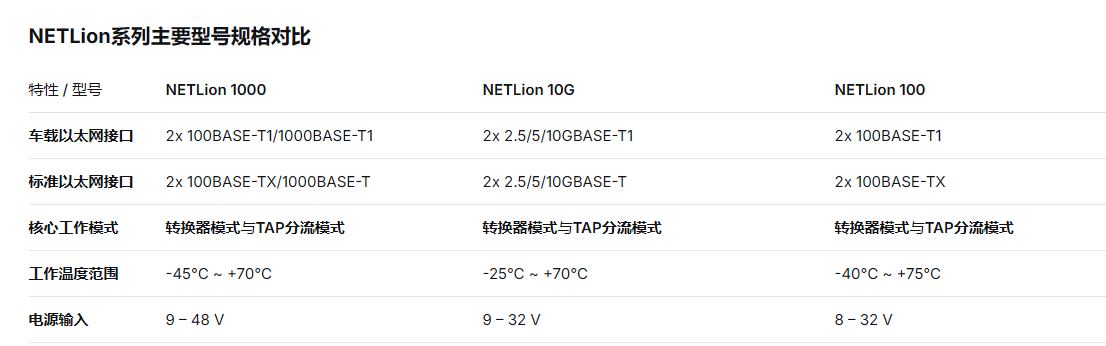
车载以太网转换器:专业选择指南与康谋NETLion系列深度解析
车载以太网高端数据记录模块GL5450解决方案

如何选择支持CAN FD与车载以太网的一体化车载网络测试主板?虹科车辆网络通讯测试主板深度解析
LoRa基站与网关概念

汽车网络升级攻略:CAN-CAN FD-车载以太网

Microchip LAN9211-ABZJ 集成 10/100 以太网 PHY的以太网控制器

新品发布 | 同星新一代TC1055 Pro开启车载网络测试新时代





评论