 基于 FOC 的吸尘器无刷马达驱动控制板方案-艾毕胜
基于 FOC 的吸尘器无刷马达驱动控制板方案-艾毕胜


吸尘器无刷马达驱动控制板方案
"STM32G4主控+TI驱动器打造高效FOC方案:92%能效、200ms极速启停,集成国产化降本设计与智能扩展接口,通过72小时老化验证。"
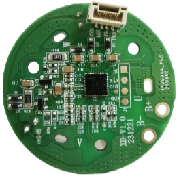
一、系统架构设计本方案采用STM32G4系列MCU作为主控芯片,集成M0内核与硬件浮点运算单元,满足FOC算法实时性需求。驱动部分选用TI的三相栅极驱动器,支持最高60V/10A输出,集成电流采样放大器与Buck稳压器。功率级采用Nexperia的PSMN1R4-40YLD MOSFET,Rds(on)低至1.4mΩ,有效降低开关损耗。
电路包含:1. 三相电流采样:采用3x100mΩ shunt电阻+DRV8323内置PGA(可编程增益放大器)2. 位置检测:磁编码器,14位分辨率,支持ABZ输出与UVW换相信号3. 母线电压检测:分压电路+MCU内部12位ADC4. 过流保护:硬件比较器触发PWM紧急关断
二、FOC控制算法实现1. 坐标变换环节:- Clark变换将三相电流转换为静止坐标系两相电流- Park变换将静止坐标系转换为旋转坐标系,角度信息来自磁编码器- 逆Park变换将控制量转换回静止坐标系
2. 电流环控制:- 采用双闭环PI调节器,带宽设置为1kHz- Id=0控制策略,q轴电流直接对应转矩输出- 前馈补偿环节加入反电动势项
3. 弱磁控制:- 当转速超过基速时,注入负向d轴电流- 动态调整弱磁系数,维持母线电压利用率
三、关键性能优化1. 死区补偿:- 基于电流极性的自适应补偿算法- 补偿量=死区时间×开关频率×母线电压
2. 参数自整定:- 自动识别电机电阻(R)、电感(L)参数- 静止注入法测量初始位置角
3. 效率提升措施:- 开关频率动态调整(15-30kHz)- 基于损耗模型的PWM模式切换(SVPWM/DPWM)
四、EMC设计要点1. PCB布局:- 功率回路面积控制在5cm²以内- 栅极驱动走线采用容抗匹配设计
2. 滤波电路:- 输入级π型滤波器(100μF+10μH+100μF)- 输出端RC缓冲电路(10Ω+100nF)
3. 接地策略:- 功率地、信号地单点连接- 编码器接口采用屏蔽双绞线
五、保护功能实现
1. 分级保护机制:- Level1:软件限制最大电流(20A)- Level2:硬件比较器触发保护(30A)- Level3:保险丝熔断保护(40A)
2. 故障诊断:- 实时监测MOSFET结温(NTC贴片)- 振动传感器检测转子失衡
六、量产测试方案1. 自动化测试项目:- 空载特性曲线(转速-电流关系)- 负载阶跃响应(10%-90%突变测试)- 效率图谱(20%-100%负载扫描)
2. 老化测试标准:- 85℃环境温度连续运行72小时- 每分钟10次启停冲击测试
七、软件架构设计1. 实时控制层:- 50μs电流环中断- 100μs速度环中断
2. 应用层功能:- 转速曲线预设(地板/地毯模式切换)- 堵转检测与自动恢复- OTA升级接口
3. 调试接口:- 基于J-Scope的实时变量监控- 故障代码Flash存储
八、BOM成本优化1. 国产化替代方案:- 主控替换为英飞凌
2. 降本设计:- 单电阻采样替代三电阻方案- 霍尔传感器替代磁编码器
九、实测性能指标1. 能效表现:- 额定负载效率≥92%- 待机功耗<0.5W
2. 动态特性:- 0-100krpm加速时间<200ms- 转速波动率<1%
3. 寿命测试:- 轴承寿命>2000小时- 电子部件MTBF>50000小时
十、方案扩展性1. 智能功能扩展:- 语音控制接口(预留UART)- 尘袋检测(压力传感器接口)
2. 多电机协同:- 主从模式控制(CAN总线)- 负载均衡算法
审核编辑 黄宇
-
控制板
+关注
关注
5文章
304浏览量
33355 -
FOC
+关注
关注
21文章
401浏览量
46435 -
马达驱动
+关注
关注
2文章
149浏览量
20918
发布评论请先 登录
低转矩脉动的吸尘器马达驱动板控制策略与 PCB 布局方案
融合 FOC 算法与 EMC 优化的高速吸尘器马达驱动板实现方案
打破转速天花板!其利天下13万转无刷吸尘器PCBA方案,吸力提升50%

吸尘器续航短?其利天下无刷吸尘器驱动方案,续航提升40%

其利天下无刷吸尘器驱动方案:家用 / 商用全适配,选型不踩坑

基于 FOC 的无刷马达驱动板:电流调控、换向逻辑与驱动性能-艾毕胜电子
吸尘器 BLDC 马达驱动板设计与高精度位置传感方案-艾毕胜电子
智能吸尘器 BLDC 电机 FOC/SVPWM 驱动控制优化研究:解锁清洁新境界
无刷直流电机在车载吸尘器马达驱动方案中的应用:突破效率与响应瓶颈
面向手持吸尘器的高效FOC驱动系统:优化真空效率与整机能效
三相无刷直流电机的手持吸尘器高效动力系统构建方案
为无刷吸尘器驱动方案按下“静音键”--【其利天下】




评论