 【瑞萨RA × Zephyr评测】ADC、DAC和PWM
【瑞萨RA × Zephyr评测】ADC、DAC和PWM

本文章旨在评估使用 Zephyr RTOS 在 Renesas FPB-RA6E2 开发板上实现 ADC(模数转换器)、DAC(数模转换器)和 PWM(脉宽调制)功能的应用。评估内容包括设备树配置、驱动初始化流程、主程序逻辑的详细解析,以及实验现象与数据分析。
1. 硬件连接与引脚定义
本实验涉及 ADC、DAC 和 PWM 的硬件资源,以下是关键引脚及其功能:
| 功能 | 物理引脚 (Pin) | 信号定义 | 接线说明 |
|---|---|---|---|
| ADC 输入 | P013 | Analog In (AN011) | 连接至 DAC 输出或外部信号源 |
| DAC 输出 | P014 | Analog Out (DA0) | 输出模拟电压 |
| PWM 输出 | P408 | PWM Signal | 使用 GPT1 定时器通道 1 |
2. 软件环境配置
2.1 Device Tree Overlay (app.overlay)
设备树用于定义外设的物理引脚绑定和初始状态。以下是关键配置:
ADC 配置
&adc0 {
status = "okay";
pinctrl-0 = < &adc0_default >;
pinctrl-names = "default";
channel@0 {
reg = < 0 >;
zephyr,gain = "ADC_GAIN_1";
zephyr,reference = "ADC_REF_INTERNAL";
zephyr,acquisition-time = < ADC_ACQ_TIME_DEFAULT >;
zephyr,resolution = < 12 >;
};
};
};
};};
#### DAC 配置
&dac0 {
status = "okay";
pinctrl-0 = < &dac0_default >;
pinctrl-names = "default";
};
&pinctrl {
dac0_default: dac0_default {
group1 {
psels = < RA_PSEL(RA_PSEL_DAC, 0, 14) >;
renesas,analog-enable;
};
};
};
};
};};
#### PWM 配置
&pwm1 {
status = "okay";
};
pwmleds {
compatible = "pwm-leds";
pwm_led_p408: pwm_led_p408 {
pwms = < &pwm1 1 PWM_MSEC(1) PWM_POLARITY_NORMAL >;
};
};
};
};};
### 2.2 Kconfig 配置 (prj.conf)
确保启用了 ADC、DAC 和 PWM 驱动支持:
CONFIG_ADC=y
CONFIG_DAC=y
CONFIG_PWM=y
CONFIG_LOG=y
3. 代码逻辑分析
3.1 核心流程
ADC 流程
/*
* Copyright (c) 2020 Libre Solar Technologies GmbH
*
* SPDX-License-Identifier: Apache-2.0
*/
#include < inttypes.h >
#include < stddef.h >
#include < stdint.h >
#include < zephyr/device.h >
#include < zephyr/devicetree.h >
#include < zephyr/drivers/adc.h >
#include < zephyr/kernel.h >
#include < zephyr/sys/printk.h >
#include < zephyr/sys/util.h >
#if !DT_NODE_EXISTS(DT_PATH(zephyr_user)) ||
!DT_NODE_HAS_PROP(DT_PATH(zephyr_user), io_channels)
#error "No suitable devicetree overlay specified"
#endif
#define DT_SPEC_AND_COMMA(node_id, prop, idx)
ADC_DT_SPEC_GET_BY_IDX(node_id, idx),
/* Data of ADC io-channels specified in devicetree. */
static const struct adc_dt_spec adc_channels[] = {
DT_FOREACH_PROP_ELEM(DT_PATH(zephyr_user), io_channels,
DT_SPEC_AND_COMMA)
};
int main(void)
{
int err;
uint32_t count = 0;
uint16_t buf;
struct adc_sequence sequence = {
.buffer = &buf,
/* buffer size in bytes, not number of samples */
.buffer_size = sizeof(buf),
};
/* Configure channels individually prior to sampling. */
for (size_t i = 0U; i < ARRAY_SIZE(adc_channels); i++) {
if (!adc_is_ready_dt(&adc_channels[i])) {
printk("ADC controller device %s not readyn", adc_channels[i].dev- >name);
return 0;
}
err = adc_channel_setup_dt(&adc_channels[i]);
if (err < 0) {
printk("Could not setup channel #%d (%d)n", i, err);
return 0;
}
}
while (1) {
printk("ADC reading[%u]:n", count++);
for (size_t i = 0U; i < ARRAY_SIZE(adc_channels); i++) {
int32_t val_mv;
printk("- %s, channel %d: ",
adc_channels[i].dev- >name,
adc_channels[i].channel_id);
(void)adc_sequence_init_dt(&adc_channels[i], &sequence);
err = adc_read_dt(&adc_channels[i], &sequence);
if (err < 0) {
printk("Could not read (%d)n", err);
continue;
}
/*
* If using differential mode, the 16 bit value
* in the ADC sample buffer should be a signed 2's
* complement value.
*/
if (adc_channels[i].channel_cfg.differential) {
val_mv = (int32_t)((int16_t)buf);
} else {
val_mv = (int32_t)buf;
}
printk("%"PRId32, val_mv);
err = adc_raw_to_millivolts_dt(&adc_channels[i],
&val_mv);
/* conversion to mV may not be supported, skip if not */
if (err < 0) {
printk(" (value in mV not available)n");
} else {
printk(" = %"PRId32" mVn", val_mv);
}
}
k_msleep(1000);
}
return 0;
}
- 初始化 ADC 驱动并配置通道。
- 调用
adc_read函数读取模拟输入值。 - 将读取的数字值转换为实际电压(基于参考电压和分辨率)。
DAC 流程
/*
* Copyright (c) 2020 Libre Solar Technologies GmbH
*
* SPDX-License-Identifier: Apache-2.0
*/
#include < zephyr/kernel.h >
#include < zephyr/sys/printk.h >
#include < zephyr/drivers/dac.h >
#define ZEPHYR_USER_NODE DT_PATH(zephyr_user)
#if (DT_NODE_HAS_PROP(ZEPHYR_USER_NODE, dac) &&
DT_NODE_HAS_PROP(ZEPHYR_USER_NODE, dac_channel_id) &&
DT_NODE_HAS_PROP(ZEPHYR_USER_NODE, dac_resolution))
#define DAC_NODE DT_PHANDLE(ZEPHYR_USER_NODE, dac)
#define DAC_CHANNEL_ID DT_PROP(ZEPHYR_USER_NODE, dac_channel_id)
#define DAC_RESOLUTION DT_PROP(ZEPHYR_USER_NODE, dac_resolution)
#else
#error "Unsupported board: see README and check /zephyr,user node"
#define DAC_NODE DT_INVALID_NODE
#define DAC_CHANNEL_ID 0
#define DAC_RESOLUTION 0
#endif
static const struct device *const dac_dev = DEVICE_DT_GET(DAC_NODE);
static const struct dac_channel_cfg dac_ch_cfg = {
.channel_id = DAC_CHANNEL_ID,
.resolution = DAC_RESOLUTION,
#if defined(CONFIG_DAC_BUFFER_NOT_SUPPORT)
.buffered = false,
#else
.buffered = true,
#endif /* CONFIG_DAC_BUFFER_NOT_SUPPORT */
};
int main(void)
{
if (!device_is_ready(dac_dev)) {
printk("DAC device %s is not readyn", dac_dev- >name);
return 0;
}
int ret = dac_channel_setup(dac_dev, &dac_ch_cfg);
if (ret != 0) {
printk("Setting up of DAC channel failed with code %dn", ret);
return 0;
}
printk("Generating sawtooth signal at DAC channel %d.n",
DAC_CHANNEL_ID);
while (1) {
/* Number of valid DAC values, e.g. 4096 for 12-bit DAC */
const int dac_values = 1U < < DAC_RESOLUTION;
/*
* 1 msec sleep leads to about 4 sec signal period for 12-bit
* DACs. For DACs with lower resolution, sleep time needs to
* be increased.
* Make sure to sleep at least 1 msec even for future 16-bit
* DACs (lowering signal frequency).
*/
const int sleep_time = 4096 / dac_values > 0 ?
4096 / dac_values : 1;
for (int i = 0; i < dac_values; i++) {
ret = dac_write_value(dac_dev, DAC_CHANNEL_ID, i);
if (ret != 0) {
printk("dac_write_value() failed with code %dn", ret);
return 0;
}
k_sleep(K_MSEC(sleep_time));
}
}
return 0;
}
- 初始化 DAC 驱动并设置通道分辨率。
- 调用
dac_write_value函数输出模拟电压。 - 通过循环生成锯齿波或三角波。
PWM 流程
/*
* Copyright (c) 2016 Intel Corporation
* Copyright (c) 2020 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include < zephyr/kernel.h >
#include < zephyr/sys/printk.h >
#include < zephyr/device.h >
#include < zephyr/drivers/pwm.h >
/*
* 获取设备树中的 pwm-led0 别名
* 注意:根据之前的 Overlay 配置,这对应 P408 引脚
*/
static const struct pwm_dt_spec pwm_dev = PWM_DT_SPEC_GET(DT_ALIAS(pwm_led0));
#define PERIOD PWM_MSEC(1)
/* 每次循环增加的占空比百分数 */
#define STEP 5
/* 每次速度变化的间隔时间 (毫秒) */
#define SLEEP_MS 500
int main(void)
{
int ret;
uint8_t duty_cycle = 0; // 当前占空比 (0-100)
uint32_t pulse_width = 0; // 实际脉宽时间
if (!pwm_is_ready_dt(&pwm_dev)) {
printk("Error: PWM device %s is not readyn",
pwm_dev.dev- >name);
return 0;
}
printk("Starting pwm control on channel %d...n", pwm_dev.channel);
ret = pwm_set_dt(&pwm_dev, PERIOD, 0);
if (ret) {
printk("Error: PWM device does not support period %lun", PERIOD);
return 0;
}
while (1) {
/* 计算脉宽: (周期 * 百分比) / 100 */
pulse_width = (uint32_t)((uint64_t)PERIOD * duty_cycle / 100U);
/* 设置 PWM: 周期固定,改变脉宽 */
ret = pwm_set_dt(&pwm_dev, PERIOD, pulse_width);
if (ret) {
printk("Error %d: failed to set pulse widthn", ret);
return 0;
}
/* 增加速度 */
duty_cycle += STEP;
/* 如果超过 100%,重置为 0 */
if (duty_cycle > 100) {
duty_cycle = 0;
printk(" > > Resetting cycle <
- 初始化 PWM 驱动并设置周期。
- 调用
pwm_set_dt函数调整占空比。 - 通过循环实现占空比的动态变化。
3.2 关键 API 使用
以下是代码中使用的关键 API:
ADC
int adc_read(const struct device *dev, const struct adc_sequence *sequence);
dev: ADC 设备句柄。sequence: 包含通道、缓冲区和采样时间的配置结构体。
DAC
int dac_write_value(const struct device *dev, uint8_t channel, uint32_t value);
dev: DAC 设备句柄。channel: DAC 通道 ID。value: 输出的数字值。
PWM
int pwm_set_dt(const struct pwm_dt_spec *spec, uint32_t period, uint32_t pulse);
spec: PWM 设备树绑定结构体。period: PWM 周期(纳秒)。pulse: PWM 脉宽(纳秒)。
4. 实验现象与数据分析
4.1 ADC 数据采集
终端应显示如下数据流:
ADC reading[0]:
* adc@40170000, channel 0: 0 = 0 mV
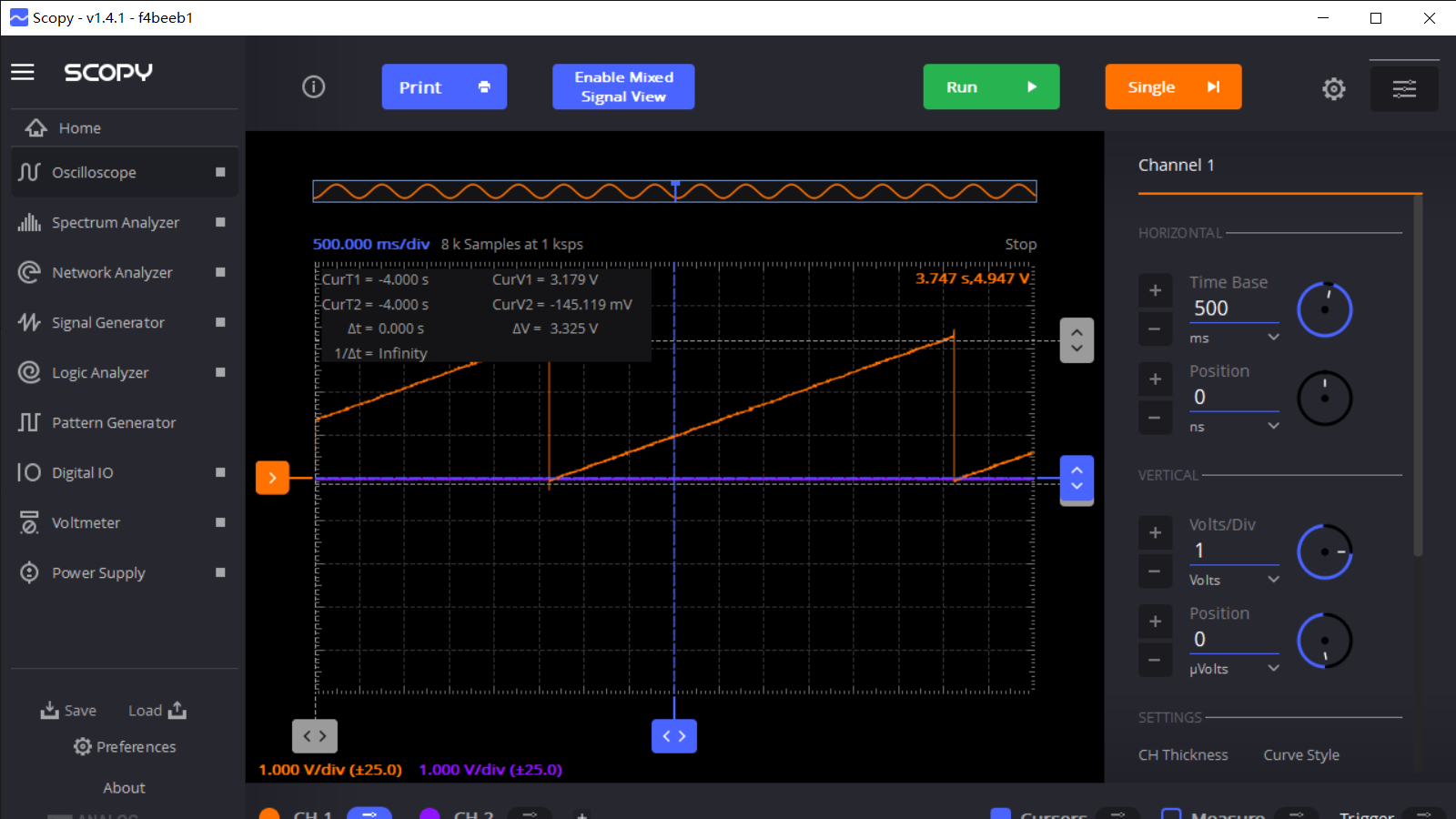
4.2 DAC 输出波形
- 初始状态 : DAC 输出 0V。
- 运行时 : 生成锯齿波或三角波,频率由延时控制。
- 视觉效果 : 使用示波器观测 P014 引脚,应看到稳定的波形。
4.3 PWM 占空比变化
- 初始状态 : PWM 输出低电平。
- 运行时 : 占空比从 0% 到 100% 循环变化。
- 视觉效果 : 使用 LED 或示波器观测 P408 引脚,亮度或波形应随占空比变化。
5. 测评总结
本程序成功演示了 Renesas RA6E2 在 Zephyr RTOS 下的 ADC、DAC 和 PWM 外设控制。通过闭环测试验证了数模转换的准确性,并展示了嵌入式系统中“数字-模拟-数字”的完整转换过程。代码结构清晰,适配了最新的驱动 API,适用于初学者学习和开发者快速验证硬件功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6078文章
45590浏览量
673956 -
adc
+关注
关注
100文章
7950浏览量
557002 -
开发板
+关注
关注
26文章
6433浏览量
121194 -
Zephyr
+关注
关注
1文章
62浏览量
6637
发布评论请先 登录
相关推荐
热点推荐
如何搭建瑞萨RA VS code开发环境
在上一篇文章“当RA MCU遇见Zephyr,打通嵌入式开发任督二脉!”中,我们介绍了Zephyr极具前景的发展趋势以及瑞萨开发板对

【RA6M3 HMI Board评测挑战】-瑞萨RA6M3上的CAN实践
【RA6M3 HMI Board 评测大挑战】-瑞萨RA6M3上的CAN实践
当RA MCU遇见Zephyr系列(3)——在Vs code中配置Zephyr集成开发环境
RA生态工作室关注我们上一篇文章介绍了如何在VScode中使用瑞萨官方插件为RA芯片创建项目与项目调试,相信大家对RA在VScode中的开发
瑞萨RA MCU众测宝典 | 串口之【RA-Eco-RA2L1】RTC日历及串口设置时间
瑞萨“RAMCU众测宝典”串口专题添硬核实操!开启宝典前言RAMCU众测宝典|串口之【RA2L1】开发板开箱及串口输出实现RAMCU众测宝典|PWM之【

【瑞萨RA6E2】ADC、DAC 电压输入输出
);
代码中 dac 的值为 0 ~ 4095,对应 0 ~ 3.3v 电压
【ADC 电压输入】
瑞萨 RA6E2 支持 12 位
发表于 11-10 01:29
【瑞萨RA6E2地奇星开发板试用】DAC 输出指定电压、ADC 电压检测
);
代码中 dac 的值为 0 ~ 4095,对应 0 ~ 3.3v 电压
【ADC 电压输入】
瑞萨 RA6E2 支持 12 位
发表于 12-19 18:30
【瑞萨FPB-RA6E2试用】基础功能使用2
的基础功能模块。
PWM 呼吸灯
前言
硬件:Renesas FPB-RA6E2 开发板
系统 zephyr 4.2.0
目的:测评zephyr对瑞
发表于 12-30 17:08
【瑞萨FPB-RA6E2试用】【瑞萨RA × Zephyr开发板评测】ADC、DAC、SPI、I2C 测试
1. 前言
在上一篇评测中,我们完成了开发环境搭建和基础 GPIO 控制。作为一款高性能 MCU,RA6E2 的通信接口(SPI/I2C)和模拟外设(ADC/DAC)才是其核心竞争力的
发表于 01-12 00:01
【瑞萨RA × Zephyr开发板评测】基于PWM的电机转速控制
项目使用瑞萨的FPB-RAE62作为控制板,主要功能如下:
ADC采集控制器数据来控制PWM波形的占空比
电机驱动板来控制的电机的转速
PWM
发表于 01-16 01:19
【瑞萨FPB-RA6E2试用】【FPB-RA6E2】 DAC-ADC 回环测试:基于 Zephyr RTOS 的模拟信号通路验证
Zephyr ADC / DAC API
调试设备树 / pinctrl
校准 ADC / DAC 偏差
硬件 Bring-up 阶段测试
发表于 01-16 15:22
【瑞萨FPB-RA6E2试用】【瑞萨RA × Zephyr开发板评测】基于PWM的电机转速控制
项目使用瑞萨的FPB-RAE62作为控制板,主要功能如下:
ADC采集控制器数据来控制PWM波形的占空比
电机驱动板来控制的电机的转速
PWM
发表于 01-17 16:18
【瑞萨RA × Zephyr评测】SSD1306显示MPU6050加速度计读数
本文介绍了在瑞萨RA6E2单片机上基于Zephyr RTOS操作SPI与I2C总线的实验




评论