 汽车CAN FD系统基础芯片TCAN1164-Q1:特性、应用与设计要点
汽车CAN FD系统基础芯片TCAN1164-Q1:特性、应用与设计要点

汽车CAN FD系统基础芯片TCAN1164-Q1:特性、应用与设计要点
在汽车电子领域,随着高级驾驶辅助系统(ADAS)、汽车信息娱乐系统等的不断发展,对高速、可靠的通信技术需求日益增长。CAN FD(Controller Area Network with Flexible Data Rate)作为一种重要的汽车通信协议,能够满足汽车电子系统对数据传输速率和可靠性的要求。而TCAN1164-Q1作为一款符合AEC Q100标准的汽车CAN FD系统基础芯片(SBC),为汽车电子设计提供了强大的支持。本文将详细介绍TCAN1164-Q1的特性、应用以及设计要点,帮助电子工程师更好地了解和应用这款芯片。
文件下载:tcan1164-q1.pdf
一、芯片概述
TCAN1164-Q1是一款高速控制器局域网(CAN)系统基础芯片,符合ISO 11898-2:2016高速CAN规范的物理层要求。该收发器支持传统CAN和CAN FD网络,数据速率高达8兆位/秒(Mbps)(TCAN1164-Q1)或5Mbps(TCAN1164T-Q1),能够满足不同汽车应用场景对数据传输速率的需求。
同时,TCAN1164-Q1支持宽输入电源电压范围,并且集成了5V LDO输出。5V LDO输出(VCCOUT)可在内部为CAN收发器提供电压,并在外部提供额外电流,为系统设计提供了便利。
二、特性亮点
2.1 符合汽车标准与规范
该芯片符合面向汽车应用的AEC Q100(1级)标准,符合ISO 11898-2:2016的要求,具备功能安全质量管理型,还提供可帮助进行功能安全系统设计的文档,确保了在汽车环境中的可靠性和安全性。
2.2 强大的电源与性能
- 宽工作输入电压范围:支持宽范围的输入电源电压,为系统设计提供了更大的灵活性。
- 集成LDO输出:集成了具有100mA输出电流能力的5V LDO,可为CAN收发器及其他外部设备供电。
- 高速数据传输:支持高达8Mbps(TCAN1164-Q1)或5Mbps(TCAN1164T-Q1)的传统CAN和CAN FD通信,满足高速数据传输需求。
2.3 丰富的保护与诊断功能
- 总线故障保护:具备±58V CAN总线容错能力,能够有效应对总线短路等故障情况。
- 电源保护:支持VSUP上的负载突降保护、IEC ESD保护、欠压和过压保护以及热关断保护,确保芯片在各种恶劣电源环境下正常工作。
- TXD显性状态超时保护:防止因TXD长时间处于显性状态而影响网络通信。
2.4 灵活的工作模式与看门狗功能
2.5 良好的封装与检测特性
采用无引线VSON(14)封装,具有可湿性侧面,提高了自动光学检测(AOI)能力,方便生产制造过程中的检测和组装。
三、应用领域
3.1 高级驾驶辅助系统(ADAS)
在ADAS系统中,需要大量的传感器数据进行实时处理和传输,TCAN1164-Q1的高速数据传输能力和可靠的通信性能能够满足传感器与控制器之间的数据交互需求,确保系统的实时性和准确性。
3.2 车身电子装置和照明
车身电子装置如车门控制、车窗控制、照明系统等,需要稳定的通信协议来实现各个模块之间的协同工作。TCAN1164-Q1的可靠性和低功耗特性使其成为车身电子系统的理想选择。
3.3 汽车信息娱乐系统和仪表组
汽车信息娱乐系统和仪表组需要处理大量的多媒体数据和车辆状态信息,TCAN1164-Q1的高速数据传输和灵活的工作模式能够满足这些系统对数据传输速率和稳定性的要求。
3.4 混合动力、电动和动力总成系统
在混合动力、电动和动力总成系统中,电池管理、电机控制等模块之间需要进行精确的数据通信,TCAN1164-Q1的高精度和可靠性能够确保这些系统的正常运行。
四、详细特性解析
4.1 引脚功能与配置
TCAN1164-Q1共有14个引脚,每个引脚都有其特定的功能。例如,TXD为CAN发送数据输入引脚,集成了上拉电阻;VCCOUT为5V LDO调节输出电压引脚;CANH和CANL为CAN总线的高低电平输入/输出引脚等。了解每个引脚的功能和配置要求,对于正确使用芯片至关重要。
4.2 电气特性与性能参数
文档中详细列出了芯片的各项电气特性和性能参数,包括绝对最大额定值、ESD额定值、推荐工作条件、电源特性、电气特性、开关特性和典型特性等。这些参数为工程师在设计电路时提供了重要的参考依据,确保芯片在合适的条件下工作,发挥最佳性能。
4.3 功能模块与工作模式
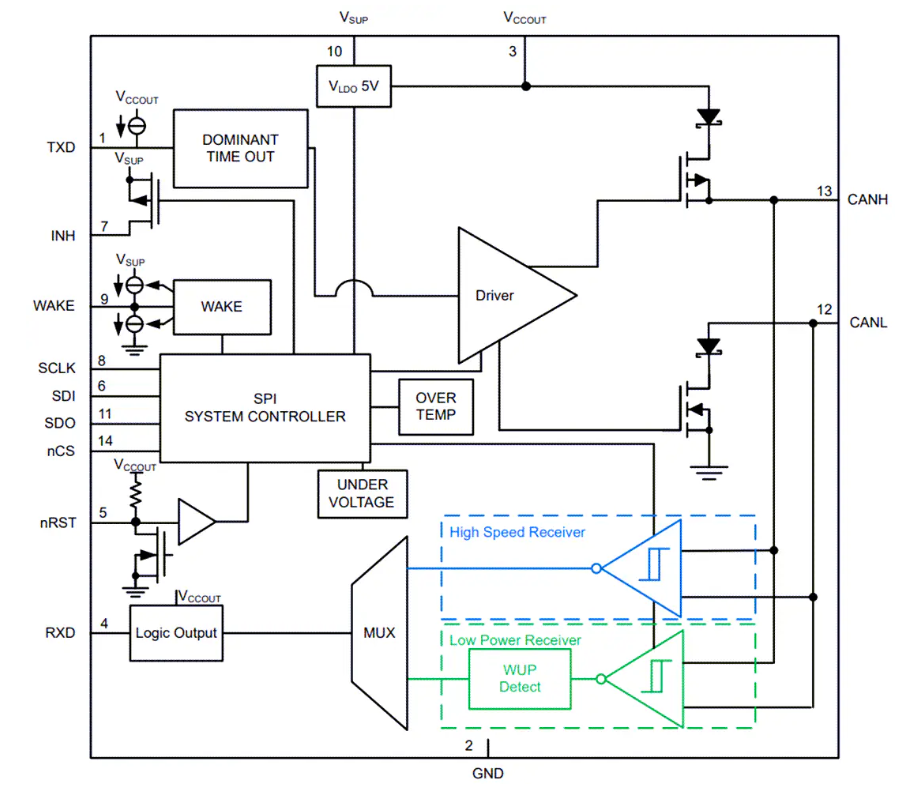
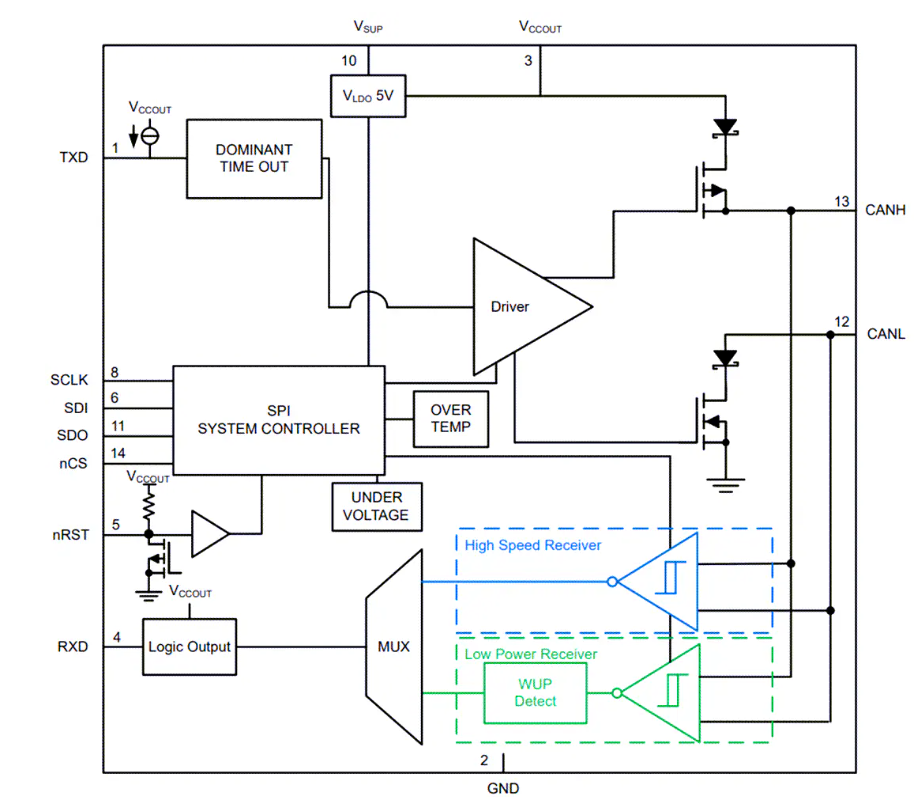
4.3.1 功能模块
芯片内部包含多个功能模块,如CAN收发器、LDO调节器、看门狗电路、故障检测电路等。这些模块协同工作,实现了芯片的各种功能。例如,CAN收发器负责数据的发送和接收,LDO调节器为芯片和外部设备提供稳定的电源,看门狗电路用于监控系统的运行状态,故障检测电路能够及时发现并处理各种故障情况。
4.3.2 工作模式
TCAN1164-Q1支持多种工作模式,包括正常模式、静音模式、待机模式、复位模式和故障安全模式等。不同的工作模式适用于不同的应用场景,工程师可以根据实际需求通过SPI编程进行选择。例如,正常模式下CAN收发器和接收器都处于工作状态,实现双向数据通信;静音模式下CAN驱动器禁用,仅接收器工作,实现单向数据接收;待机模式下芯片处于低功耗状态,当检测到唤醒事件时可快速恢复正常工作。
4.4 看门狗功能
看门狗功能是TCAN1164-Q1的一个重要特性,它可以确保系统在出现故障或异常时能够及时恢复正常运行。芯片提供了窗口基于的看门狗以及可选的自主、超时或问答(Q&A)看门狗模式,可通过SPI编程进行配置。
在使用看门狗功能时,需要注意以下几点:
- 错误计数器:芯片具有看门狗错误计数器,用于记录错过窗口或输入错误触发事件的次数。当计数器达到设定的阈值时,将触发相应的动作。
- 定时配置:不同的看门狗模式需要根据实际需求进行合理的定时配置,以确保系统的稳定性和可靠性。例如,在需要更频繁输入触发事件的场景下,建议使用超时模式。
- 问答看门狗:问答看门狗模式要求MCU从芯片读取“问题”,进行数学计算后将答案写回芯片。正确回答问题才能使看门狗正常工作,否则将触发错误处理机制。
4.5 总线故障检测与通信
TCAN1164-Q1具备先进的总线故障检测功能,能够检测CAN总线的短路、断路、接地等故障情况,并设置相应的状态/中断标志,以便MCU及时了解故障信息。
在实际应用中,由于CAN网络的复杂性,并非所有故障都能精确到具体位置。芯片通过监测CANH和CANL引脚的电流来判断故障类型,但故障检测结果可能会受到设备位置的影响。因此,在系统设计中,需要对每个节点进行系统级的诊断,并将诊断信息反馈到中央点,以实现对整个CAN网络的全面故障检测和管理。
五、设计要点与注意事项
5.1 电源设计
- 输入电压范围:TCAN1164-Q1的输入电源电压范围为5.5V至28V,输入电源必须经过良好的稳压处理。建议在靠近芯片VSUP供电引脚处放置一个100nF的旁路电容,以减少开关电源输出的电压纹波,并补偿PCB电源平面和走线的电阻和电感。
- LDO输出:VCCOUT引脚为5V LDO调节输出,该引脚需要一个10μF的外部电容,且应尽可能靠近引脚放置,以确保输出电压的稳定性。在CAN总线发生故障需要LDO提供额外电流时,可能会影响外部负载组件的可用电流,因此在设计时需要考虑这种情况。
5.2 布局设计
- 保护和滤波电路:将保护和滤波电路尽可能靠近总线连接器放置,以防止瞬态、ESD和噪声传入电路板。可以添加瞬态电压抑制(TVS)器件进行额外的保护,如双向TVS二极管或压敏电阻,其额定值应符合应用要求。
- 信号路径设计:按照信号路径设计总线保护组件,避免瞬态电流偏离信号路径到达保护器件。使用电源和接地平面提供低电感路径,以减少信号干扰。
- 电容和连接:旁路电容和大容量电容应尽可能靠近收发器的电源端子放置。对于旁路电容和保护器件的电源和接地连接,建议使用至少两个过孔,以最小化走线和过孔的电感。
- 总线终端:布局示例中展示了分裂终端的设计,即将终端电阻分为两个电阻,通过电容将终端的中心或分接头连接到地。这种设计可以为总线提供共模滤波。当总线终端放置在电路板上而不是直接在总线上时,需要特别注意确保终端节点不会从总线上移除,以免影响总线的正常工作。
5.3 编程与配置
- SPI通信:芯片采用标准的SPI接口进行通信,每个SPI事务包含一个地址和读写命令字节,后面跟着一到三个数据字节。在进行SPI通信时,需要注意时钟信号(SCLK)的频率和边沿触发特性,以及数据输入(SDI)和输出(SDO)的采样和变化时刻。
- 寄存器配置:芯片的各种功能和参数通过寄存器进行配置,如模式控制寄存器、看门狗配置寄存器、中断使能寄存器等。在进行寄存器配置时,需要仔细阅读文档,了解每个寄存器的功能和位定义,确保正确设置寄存器的值。
5.4 ESD防护
由于该集成电路容易受到ESD的损坏,在处理和安装芯片时必须采取适当的预防措施。ESD损坏可能会导致芯片性能下降甚至完全失效,特别是对于精密集成电路,微小的参数变化都可能导致芯片无法满足其规格要求。因此,在整个生产和使用过程中,都要确保良好的静电防护措施。
六、总结
TCAN1164-Q1作为一款高性能的汽车CAN FD系统基础芯片,具有丰富的特性和强大的功能,能够满足汽车电子系统对高速、可靠通信的需求。在实际设计中,电子工程师需要充分了解芯片的特性、引脚功能、电气参数、工作模式等方面的知识,合理进行电源设计、布局设计和编程配置,并注意ESD防护等问题,以确保系统的稳定性和可靠性。
同时,随着汽车电子技术的不断发展,对芯片的性能和功能要求也在不断提高。TCAN1164-Q1在设计上已经考虑了很多未来的发展趋势,但在实际应用中,工程师还需要不断关注新技术、新标准的发展,结合具体的应用场景进行优化设计,以充分发挥芯片的优势,为汽车电子系统的发展做出贡献。
你在使用TCAN1164-Q1芯片的过程中遇到过哪些问题?或者你对芯片的哪些特性更感兴趣?欢迎在评论区留言讨论。
-
汽车电子
+关注
关注
3048文章
9228浏览量
173405 -
CAN FD
+关注
关注
0文章
96浏览量
13426
发布评论请先 登录
TCAN1164-Q1 具有 LDO 输出和看门狗的汽车 CAN FD系统基础芯片数据表

汽车级CAN FD系统基础芯片TCAN1167-Q1技术解析
TCAN1164-Q1汽车CAN FD系统基础芯片技术解析



评论