 【技术分享】RK3588如何搭建xenomai3+ethercat
【技术分享】RK3588如何搭建xenomai3+ethercat

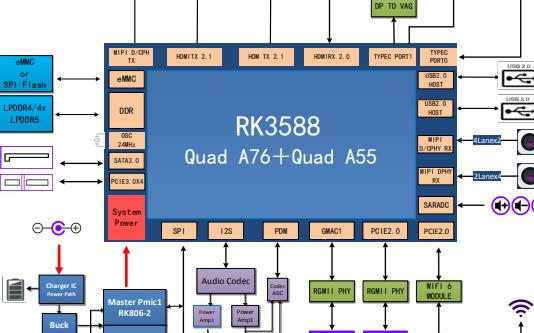
使用的RK3588的分支版本是linux-6.1-stan-rkr6 内核版本是6.1.99 把瑞芯微的SDK更新到linux-6.1-stan-rkr6这个版本即可。

编译xenomai3的内核
请参考上一篇技术分享:技术分享 | RK3588如何增加Xenomai3实时补丁
修改ethercat
下载源码:
gitclonehttps://gitlab.com/etherlab.org/ethercat.git
# 使用这个tags的版本
git checkout 1.6.7 -b kehu
用通用驱动ec_generic.ko虽然也可以,但是1ms周期的抖动延时有20us左右,那就用专用的驱动让抖动延时更低一些,ethercat的源码把stmmac的驱动移植下就可以了。可以直接使用preempt_rt的RK已经适配过ethercat源码的stmmac的部分,把devices/stmm/文件夹复制过来然后./bootstrap把Makefile的文件给配置出来,编译的时候要使用--enable-stmmac-pci参数。
rtdm是实时性的接口,也是xenomai的接口,编译的时候发现rtdm是在ec_master里面。
编译驱动
交叉编译
SDK_DIR=/home/yangx/linux2/yangx/RK3588/IAC-RK3588-MB-kernel-6.1/
TOOLS_PATH=$SDK_DIR/prebuilts/gcc/linux-x86/aarch64/gcc-arm-10.3-2021.07-x86_64-aarch64-none-linux-gnu/bin/CROSS_PATH=$TOOLS_PATH/binexportPATH=$TOOLS_PATH:$CROSS_PATH:$PATHexportCROSS_COMPILE=aarch64-none-linux-gnu-exportARCH=arm64KERNEL_SRC=/home/yangx/linux2/yangx/RK3588/IAC-RK3588-MB-kernel-6.1/kernel/xenomaiinstalldir=/home/yangx/linux2/yangx/RK3588/IAC-RK3588-MB-kernel-6.1/xenomai/build/usr/xenomai/xenomaidir=/home/yangx/linux2/yangx/RK3588/IAC-RK3588-MB-kernel-6.1/xenomai/./bootstrap./configure --prefix=/home/yangx/linux2/yangx/RK3588/IAC-RK3588-MB-kernel-6.1/ethercat/build/ --host=aarch64-none-linux-gnu --enable-kernel --with-linux-dir=${KERNEL_SRC}--enable-8139too=no --enable-stmmac-pci=yes --enable-generic=no --enable-wildcards=yes --enable-rtdm --with-xenomai-dir=${xenomaiinstalldir}mkdir -p buildmake ARCH=arm64 modules# 交叉编译这个库文件时一直提示缺少头文件,我就索性在3588里面编译exportC_INCLUDE_PATH=${xenomaidir}/include/:$C_INCLUDE_PATHexportC_INCLUDE_PATH=${xenomaiinstalldir}/include:$C_INCLUDE_PATHexportC_INCLUDE_PATH=${xenomaiinstalldir}/include:${xenomaiinstalldir}/include/cobalt/:$C_INCLUDE_PATHexportLIBRARY_PATH=${xenomaiinstalldir}/lib/:$LIBRARY_PATHmake ARCH=arm64 CROSS_COMPILE=aarch64-none-linux-gnu- install DESTDIR=/home/yangx/linux2/yangx/RK3588/IAC-RK3588-MB-kernel-6.1/ethercat_igh/build/# 安装的时候有个systemctl的配置文件需要注意下make install systemdsystemunitdir=(编译后你需要存放的目录,和configure命令上的prefix下跟的参数需要一致)
RK3588本机编译
apt install autoconf automake
# 把源码直接放到根目录下
./bootstrap
./configure --with-linux-dir=/usr/src/linux-headers-6.1-rockchip --enable-rtdm=yes --disable-8139too --enable-generic --disable-e1000e --disable-igb --enable-kernel --disable-hrtimer --disable-eoe --with-xenomai-dir=/usr/xenomai --prefix=/opt/etherlab --enable-ec_master --enable-ec_slave
make
make modules
make install
本机编译的时候会把服务什么的配置好,但是不想用的话,可以重新配置
insmod phylink.ko
insmod pcs_xpcs.ko
# 把网口的MAC地址填上,加载上这个ko,就会有/dev/EtherCAT0 节点。
insmod ec_master.ko main_devices=32b5e3:d5
insmod ec_stmmac.ko
insmod ec_stmmac.ko后的日志:
[ 587.218264] rk_gmac-dwmac fe1b0000.ethernet eth0: Link is Up - 100Mbps/Full - flow control off
[ 587.218282] IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready
[ 606.986538] ec_master: loading out-of-tree module taints kernel.
[ 606.988109] EtherCAT: Master driver 1.6.0-rc1 unknown
[ 606.988309] EtherCAT: 1 master waitingfordevices.
[ 615.636814] ec_generic: EtherCAT master generic Ethernet device module 1.6.0-rc1 unknown
[ 615.636837] EtherCAT: Accepting 32B5E3:D5 as main deviceformaster 0.
[ 615.636854] ec_generic: Binding socket to interface 2 (eth0).
[ 615.643519] EtherCAT 0: Starting EtherCAT-IDLE thread.
[ 615.643688] EtherCAT 0: Link state of ecm0 changed to UP.
[ 615.645179] EtherCAT 0: 3 slave(s) responding on main device.
[ 615.645185] EtherCAT 0: Slave states on main device: INIT.
[ 615.645586] EtherCAT 0: Scanning bus.
[ 615.956631] EtherCAT 0: Bus scanning completedin311 ms.
[ 615.956634] EtherCAT 0: Using slave 0 as DC reference clock.
[ 615.972223] EtherCAT 0: Slave states on main device: PREOP.
配置/etc/init.d:
mkdir /etc/sysconfig
cp /opt/etherlab/etc/sysconfig/ethercat /etc/sysconfig/
cp /opt/etherlab/etc/init.d/ethercat /etc/init.d/
# 把模块放到系统目录
cp devices/ec_generic.ko /lib/modules/$(uname -r)
cp master/ec_master.ko /lib/modules/(uname -r)
depmod -a
# 配置启动的网口MAC MASTER0_DEVICE=" "
vi /etc/sysconfig/ethercat
# 里面也有驱动类型的配置,配置之后可以自动加载ec_stmmac.ko,但是还是手动加载吧。
# 启动主站 服务启动需要modules的依赖文件
/etc/init.d/ethercat start
/etc/init.d/ethercat status
/etc/init.d/ethercat stop
# 实际上是一个脚本,启动另一个脚本,ethercatctl的脚本,这个脚本实际上就是配置ethercat这个二进制文件参数的,通过这个二进制文件写入网口的MAC地址。
常用的ethercat命令:
# 查看主站状态
ethercat status
# 查看从站状态
ethercat slaves
# 查看从站的寄存器
ethercat cstruct
实际测试
测试程序:
exportLD_LIBRARY_PATH=/usr/xenomai/lib/:/opt/etherlab/lib/:$LD_LIBRARY_PATH
cd
./a
taskset 0x4 ./a
Ethercat模块是EL1008,EL2008,网线直连RK3588和ethercat模块,1ms周期,10us的抖动延时。
如图所示:

/ 启扬智能自媒体矩阵 /
-
ethercat
+关注
关注
20文章
1573浏览量
46042 -
RK3588
+关注
关注
8文章
585浏览量
7540
发布评论请先 登录
瑞芯微RK3588开发板RK3588 EVB和RK3588S EVB解读
迅为RK3588开发板实时系统编译-Preemption系统/ Xenomai系统编译-获取Linux源码包
基于 RK3588 debian 搭建 RK3588 Kernel 编译环境

【LGA封装RK3588核心板】基于RK3588,小而强大的ArmSom-W3 CORE BOARD
rk3588和rk3588s的区别
RK3588与3588s的区别
RK3588系列有多少型号?


技术分享 | RK3588增加Xenomai3实时补丁

技术分享 | RK3588如何搭建preempt_rt+ethercat




评论