 国科温州研究院和南京工业大学:研究机械和肌电双信号水凝胶传感器推动假肢精准操控
国科温州研究院和南京工业大学:研究机械和肌电双信号水凝胶传感器推动假肢精准操控

针对现有假肢控制中表面肌电(sEMG)信号难以区分单个肌肉动作、无法精准控制单个手指的痛点,国科温州研究院陈强课题组和南京工业大学孙庚志团队、金陵科技学院张曌团队合作开发了一种可同时检测机械信号与 sEMG 信号的非侵入式表皮传感器(UHSH 传感器)。该传感器通过双网络水凝胶基底、脆性导电纳米复合膜的裂纹传感机制及点击化学的强界面黏附设计,实现了对肌肉收缩产生的微弱机械形变(皮肤凸起)与生物电信号的同步捕捉。其机械传感灵敏度在 10% 应变下高达 622,检测范围覆盖 400%,且能稳定工作 5 万次以上;肌电检测界面阻抗低于 3 kΩ,信噪比达 44.7 dB。结合机器学习算法,该传感器对单个手指动作的识别准确率达 96%,可成功控制机械假肢完成抓取、移动、释放等精细动作,为肢体残疾人群的假肢精准操控提供了全新解决方案,也为下一代人机交互技术发展奠定基础。该工作由多方合作共同完成,国科温州研究院史鑫磊助理研究员、金陵科技学院张曌博士和哈尔滨工程大学刘鑫同学为共同第一作者,孙庚志教授和陈强研究员为共同通讯作者。
前沿背景:假肢控制的 “精准化” 困境亟待突破
全球肢体残疾人群面临诸多生活挑战,假肢作为改善其生活质量的关键辅助设备,“精准操控” 始终是研究核心 —— 能否像健康手臂一样灵活控制单个手指,直接决定了假肢能否完成穿衣、吃饭等日常精细动作。
目前,基于表面肌电(sEMG)信号的假肢控制是主流方案,其凭借安全、舒适、低成本的优势被广泛应用。但核心局限始终存在:sEMG 信号是多个肌肉收缩的 “叠加信号”,无法精准定位单个肌肉的运动状态。这导致现有假肢大多只能实现整体抓取,难以控制单个手指的独立弯曲,极大限制了假肢的实用价值。
为解决这一问题,研究者曾尝试提升 sEMG 信号精度(如降低电极与皮肤阻抗)或集成传感器阵列,但前者仍无法区分单个肌肉动作,后者则增加了电路设计负担与数据分析难度。在此背景下,“同步捕捉肌肉的生物电与机械形变信号” 的创新思路,成为突破假肢精准控制瓶颈的关键方向。
一、传感器设计:三大核心创新突破双信号检测瓶颈
本研究的核心在于构建 “能同时‘听’(sEMG 信号)和‘摸’(机械形变)肌肉动作” 的传感器,通过三大设计策略实现性能突破:
1. 双网络水凝胶基底:兼顾柔性、导电性与保水性
传感器基底采用Agar/P(AAm-co-GMA)双网络有机水凝胶,通过物理交联(琼脂)与化学交联(聚丙烯酰胺网络)结合,既具备与人体皮肤匹配的柔性(杨氏模量 0.3 MPa,接近皮肤的 0.5~1.95 MPa),又拥有优异的机械强度(断裂伸长率 1909%)。同时,通过甘油与 NaCl 的溶剂交换,基底实现了长效保水(30 天内重量保留率超 88%)与离子导电能力,为 sEMG 信号检测提供稳定载体。
2. 脆性导电复合膜:裂纹机制实现高灵敏度机械传感
在水凝胶表面涂覆 AgNW(银纳米线)/MXene/BSA(牛血清白蛋白)脆性导电膜,通过 “裂纹传感机制” 突破传统水凝胶传感器灵敏度低的问题:当肌肉收缩引发皮肤微变形时,脆性导电膜会产生细微裂纹,导致电阻急剧变化,从而精准捕捉微弱机械信号。这种设计使传感器在 10% 应变下的灵敏度(GF 值)达到 622,远超传统水凝胶传感器(仅 0.12),且能检测低至 0.1% 的微小应变,足以识别肌肉收缩的细微动态。
3. 点击化学界面:解决导电膜与基底的脱落难题
通过点击化学反应(水凝胶表面的环氧基团与 BSA 的氨基形成 C-N 共价键),实现导电膜与水凝胶基底的强黏附(黏附强度达 127 kPa),确保传感器在反复拉伸(400% 应变)与长期使用(5 万次循环)中,导电层不脱落、信号不中断,解决了柔性传感器常见的 “层间分离” 失效问题。
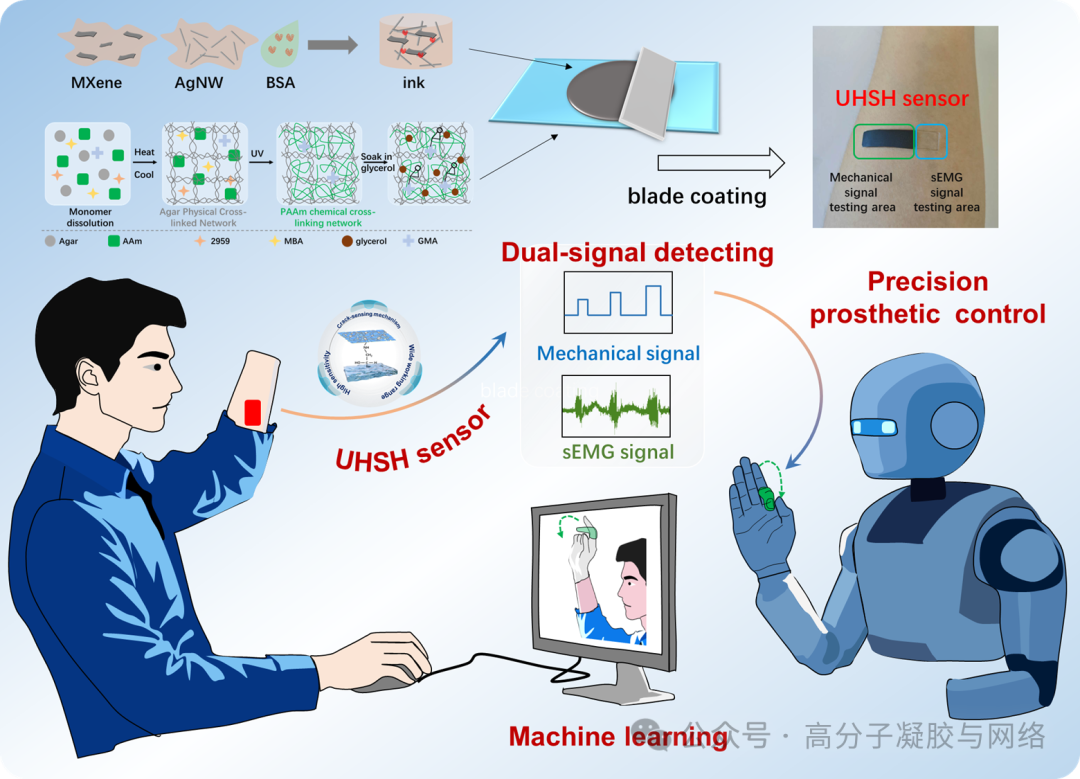
图1. 超高敏感性水凝胶基机械 / 表面肌电信号传感器示意图
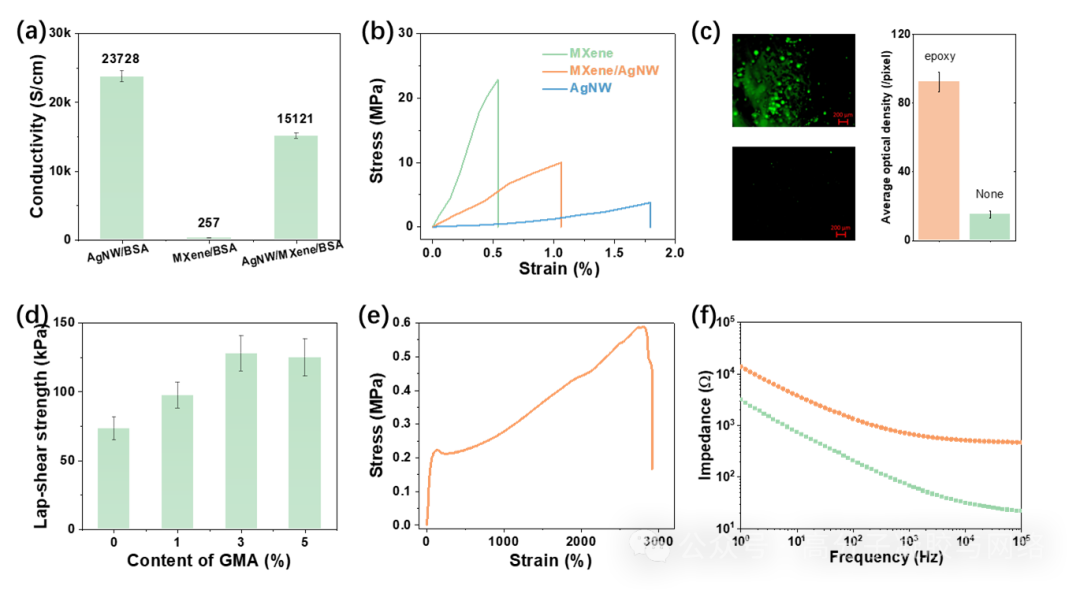
图2.超高应变敏感性水凝胶基(UHSH)传感器的表征
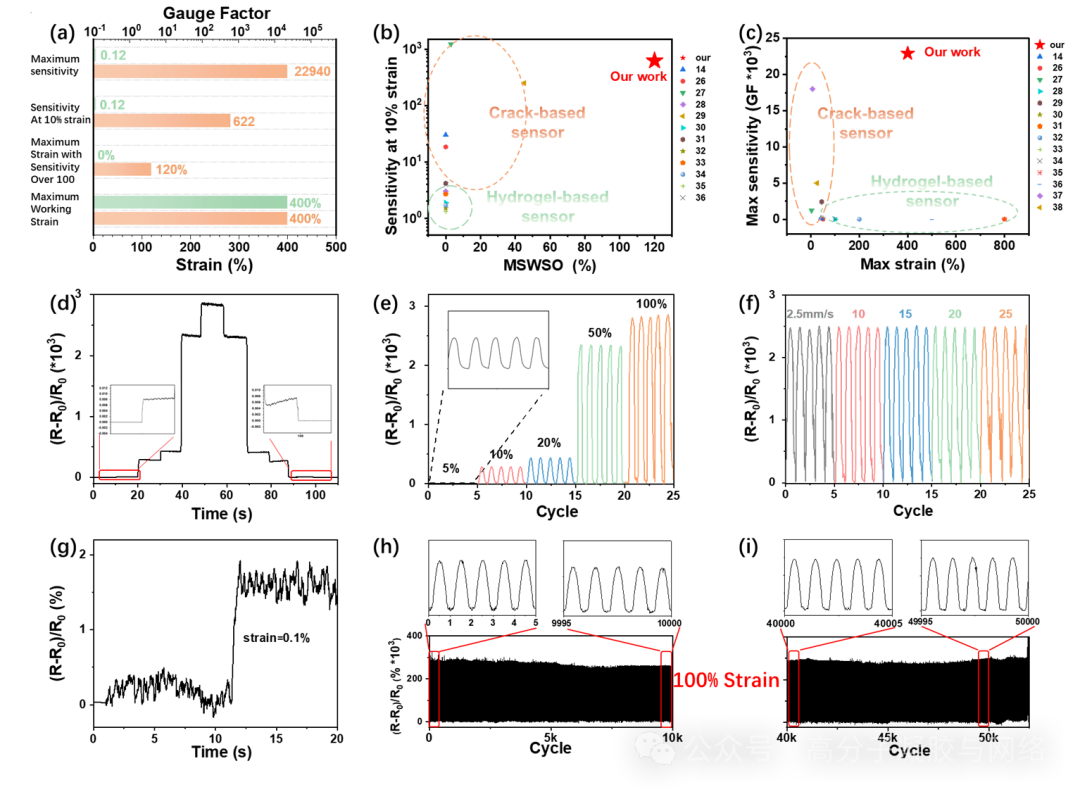
图3. UHSH 传感器的应变传感性能
二、性能验证:机械与肌电传感 “双优”,满足实用需求
1. 机械传感性能:灵敏、稳定、抗干扰
高灵敏度与宽检测范围 除 10% 应变下 GF 值 622 外,传感器最大检测范围达 400%,可覆盖从手指微屈到手臂大幅动作的全场景形变;
超长稳定性 在 100% 应变下循环拉伸 5 万次后,电阻变化峰值与基线仍保持稳定,无明显衰减;
抗干扰能力 拉伸状态下(400% 应变)界面阻抗仅增加不到 4 倍,避免机械形变对 sEMG 信号检测的干扰,确保双信号独立可靠。
2. 肌电传感性能:低阻抗、高信噪比
传感器基底的离子导电性使其与皮肤界面阻抗低于 3 kΩ,远低于传统电极(通常数十 kΩ),可有效减少信号损耗;同时,44.7 dB 的高信噪比确保 sEMG 信号清晰,即使是肌肉轻微收缩产生的微弱信号也能被精准捕捉。此外,细胞毒性实验显示,传感器与细胞共培养 24 小时后细胞存活率超 80%,具备良好生物相容性,可长期贴肤使用。
三、潜在应用:从 “信号识别” 到 “假肢操控” 的全链条验证
1. 精准识别单个手指动作:双信号的协同优势
人体手指弯曲主要由指浅屈肌(FDS)控制,不同手指对应 FDS 的不同区域 —— 肌肉收缩时,对应皮肤会产生特定的机械形变(凸起 / 凹陷)与 sEMG 信号。UHSH 传感器通过同步捕捉这两种信号:
机械信号反映皮肤形变的 “位置与幅度”,sEMG 信号反映肌肉收缩的 “强度”;
结合两者差异,可精准区分 “拇指伸展”“食指弯曲”“中指弯曲” 等 5 种典型动作,解决了单一 sEMG 信号无法定位单个肌肉的难题。
2. 机器学习赋能:动作识别准确率达 96%
研究团队构建了包含输入层、隐藏层、自适应软阈值层的机器学习模型,将双信号数据(sEMG 的频率域特征 + 机械信号的电阻均值)输入模型训练。最终在验证集上,单个手指动作的识别准确率达 96%,且对不同个体的适应性良好,为批量应用提供可能。
3. 假肢操控实战:完成精细抓取动作
通过将 UHSH 传感器贴附于残肢的 FDS 区域,传感器可实时将双信号传输至假肢控制系统。实验显示,该系统能精准复刻残肢者的动作意图,控制机械假肢完成 “抓取小球”“拿起钢笔”“释放物品” 等精细动作,动作响应延迟低,稳定性强,真正实现了假肢从 “粗控” 到 “精控” 的跨越。
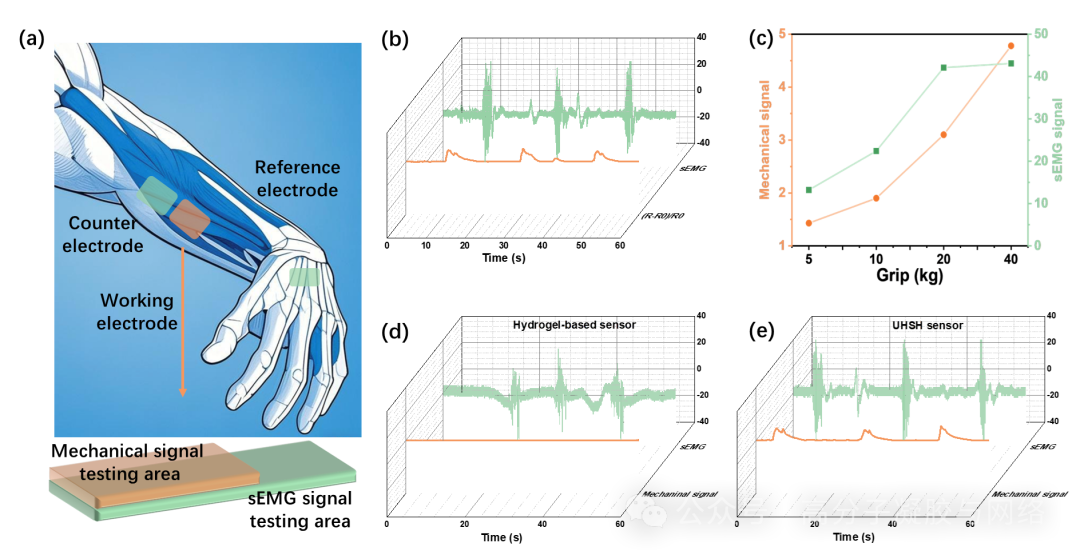
图4. UHSH 传感器结构、测试区域及信号检测性能图
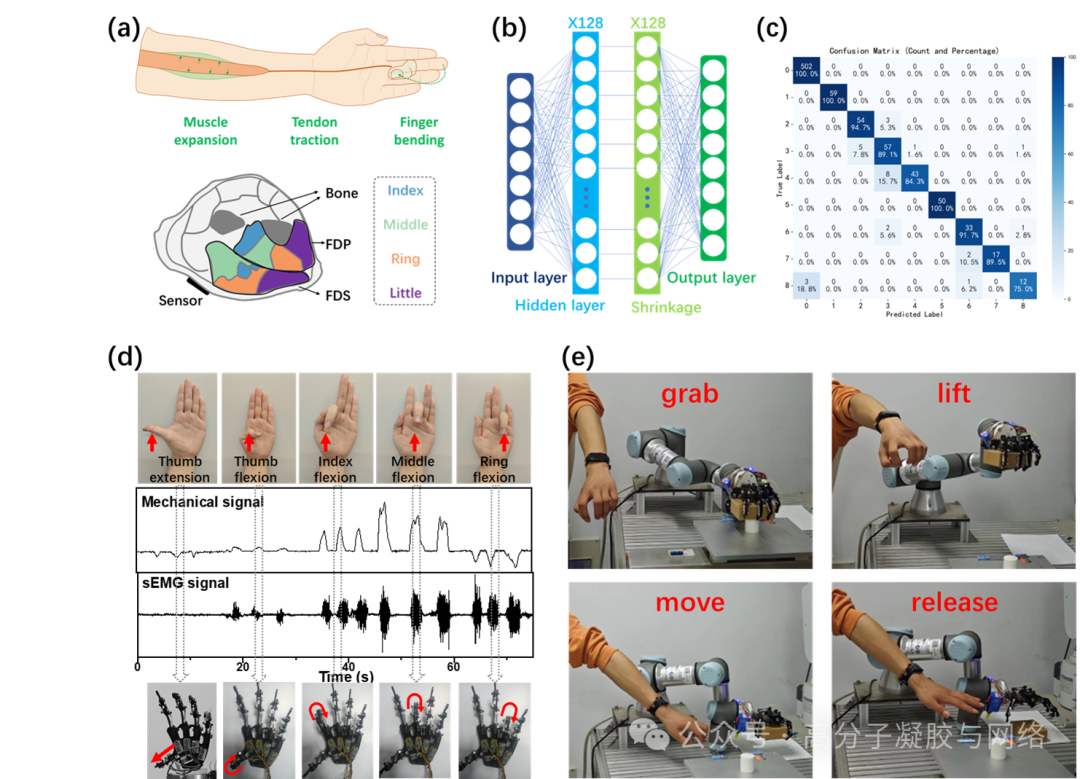
图5. 手指弯曲运动控制机制、机器学习算法及假肢操控演示图
小结
本研究以 “解决假肢精准操控痛点” 为核心,提出了 “机械 + sEMG 双信号同步检测” 的创新策略,通过三大设计突破(双网络水凝胶基底、裂纹传感导电膜、点击化学界面),成功开发出性能卓越的 UHSH 传感器。该传感器不仅在技术上实现了 “单传感器实现双信号精准检测” ,更在应用上基于非侵入式传感器的单个手指假肢控制,为肢体残疾人群带来了更贴近自然的假肢操控体验。
未来,随着该技术与人工智能、大数据的深度融合,其应用场景有望进一步拓展至智能健康监测(如肌肉疾病早期预警)、运动康复辅助(如术后动作矫正)等领域,为人体工学与医疗康复的交叉创新提供新路径。
原文链接:https://doi.org/10.1016/j.cej.2025.169648
来源:高分子凝胶与网络
-
传感器
+关注
关注
2577文章
55513浏览量
793965
发布评论请先 登录
华工科技联合共建光谷智能传感技术创新研究院
诚迈科技携手应急管理大学、中铁十九局共建智慧应急科技创新研究院

广电计量与长沙三大研究院达成战略合作
哈尔滨工业大学领导莅临美信检测交流指导
北京工业大学开源鸿蒙技术俱乐部正式揭牌成立
TÜV莱茵联合德累斯顿工业大学推出智能机器人技师国际资格认证项目
西北工业大学:实现航天器柔性传感系统首次在轨验证
华工科技与国机集团机械工业规划研究院深化战略合作
国仪电镜助力PANC/T-Fe水凝胶在不同环境温度下的微观结构分析
北京工业大学机械类学子赴昱栎技术开展深度研学

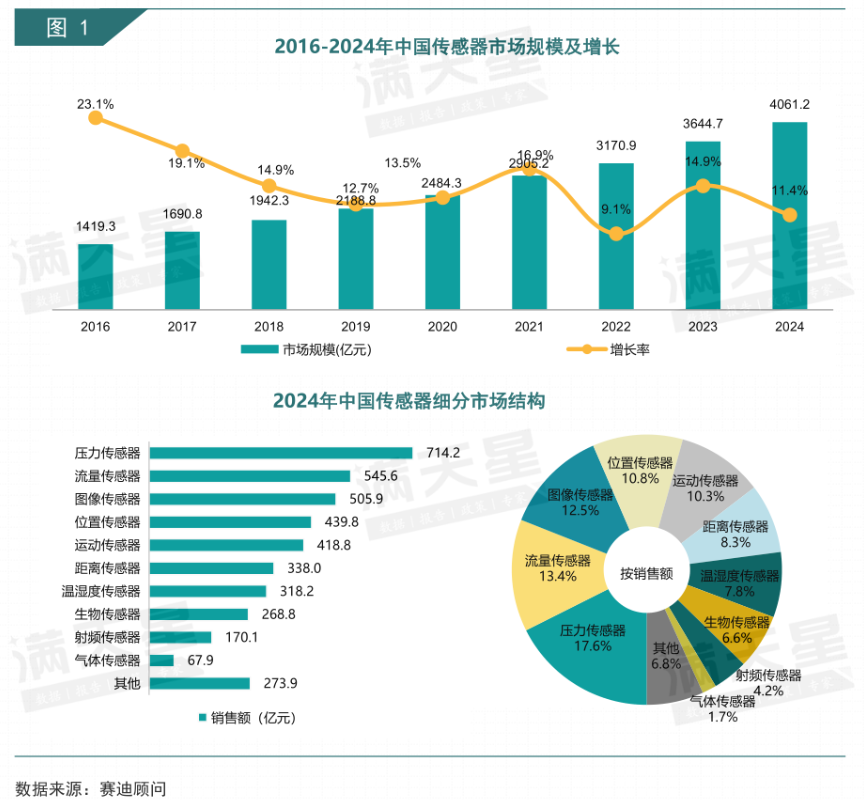
中国传感器市场规模突破4000亿!工信部产业研究院最新数据出炉
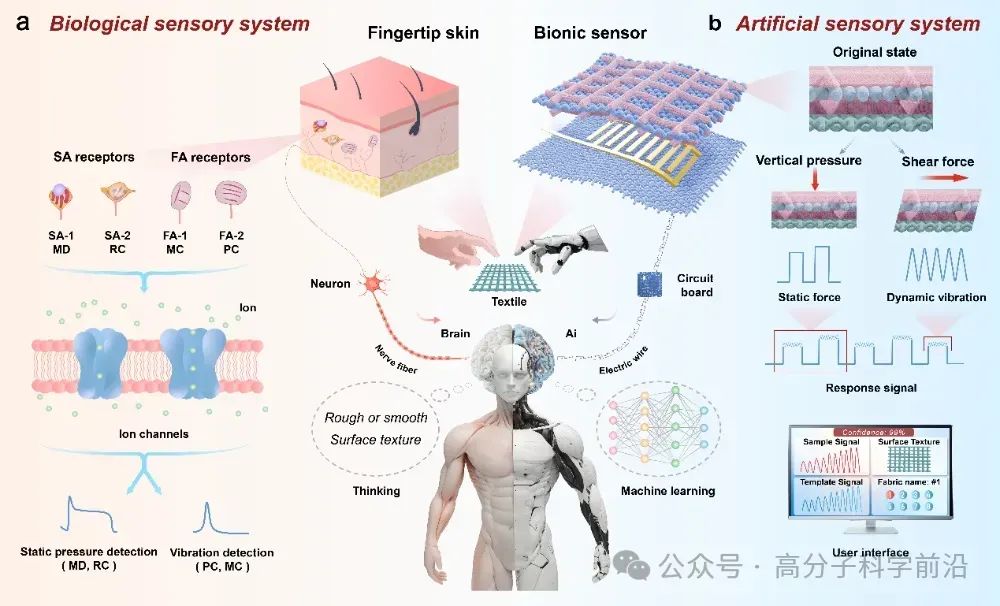
南京工业大学:仿生触觉传感系统让机器人拥有“人类指尖”般的细腻感知
导远科技与清华大学无锡应用技术研究院达成合作
石墨烯增强生物基凝胶导热和导电性能研究

齐鲁工业大学:研究聚苯胺改性细菌纤维素基水凝胶柔性传感器



评论