 ABB工业机器人中不使人注意的5大实用技巧详细概述
ABB工业机器人中不使人注意的5大实用技巧详细概述

1.复制粘贴参数加快编程时间
有的时候我们需要快速大量的更改指令语句里的参数,很浪费时间,实际上参数是可以复制的,步骤如下。

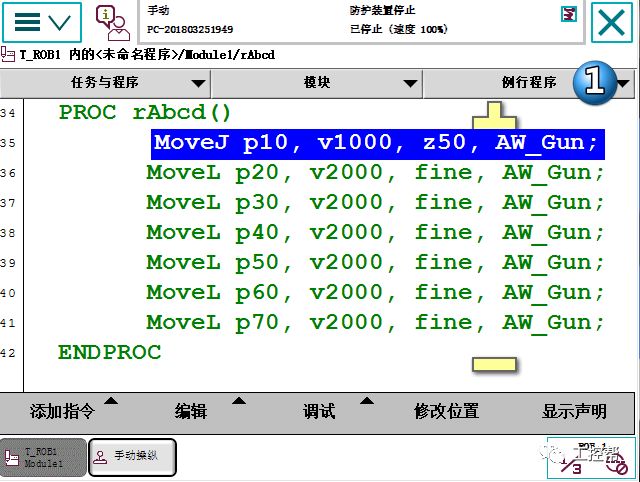
比如我们有个这样的需求,就是将上面的V1000更改为V2000。
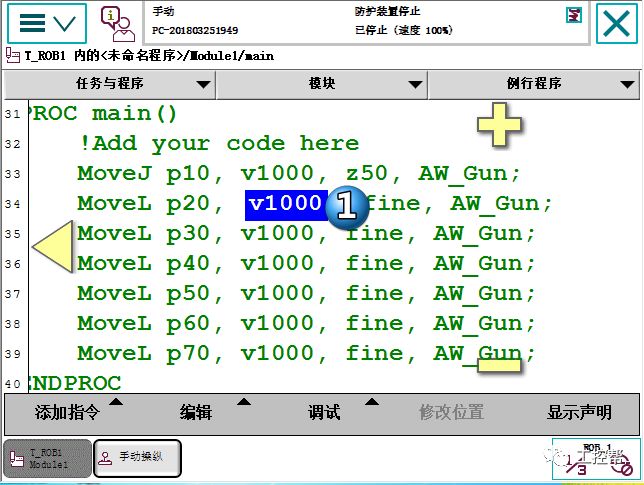

鼠标左键双击“V1000”进入选择“V2000”速度数据,单击确定。
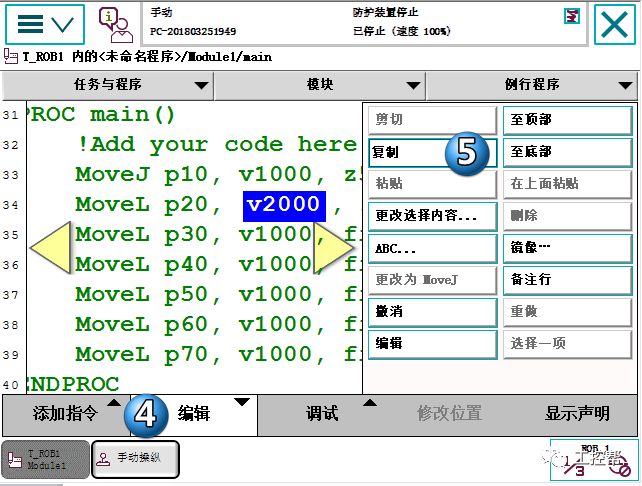
然后选择“编辑”在下拉菜单中选择“复制”对其单项速度参数进行复制。
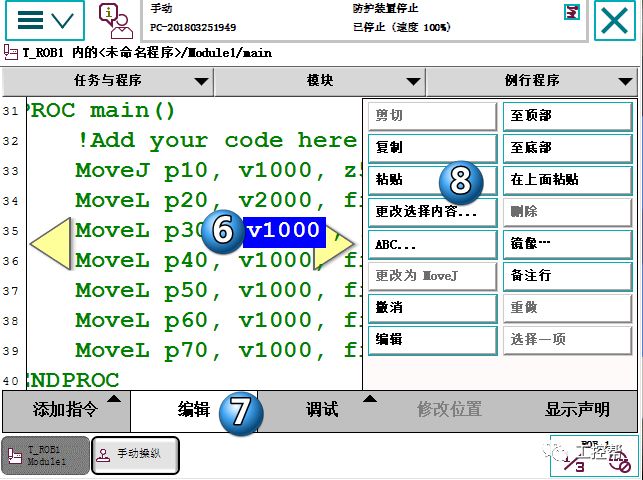
选择下一条的“速度”参数,然后选择“编辑”,在下拉菜单中单击“粘贴”选项。

这样速度数据就已经复制粘贴了一条,下面的速度数据也可以一直粘贴下去如下图。
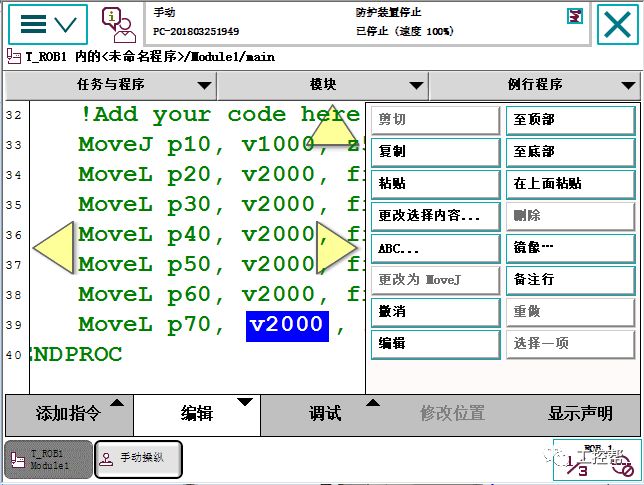
他的参数一样可以复制粘贴,快动手试试吧!
二、如何复制例行程序

首先要新建一个例行程序,比如这里新建立了一个rAbcd例行程序。
选择“例行程序”

选择“文件”菜单中的“复制例行程序”

确认名称(不要与其他例行程序重名),确认复制到哪个任务里(默认就一个任务),确认复制到的模块然后点击确定。


复制完成
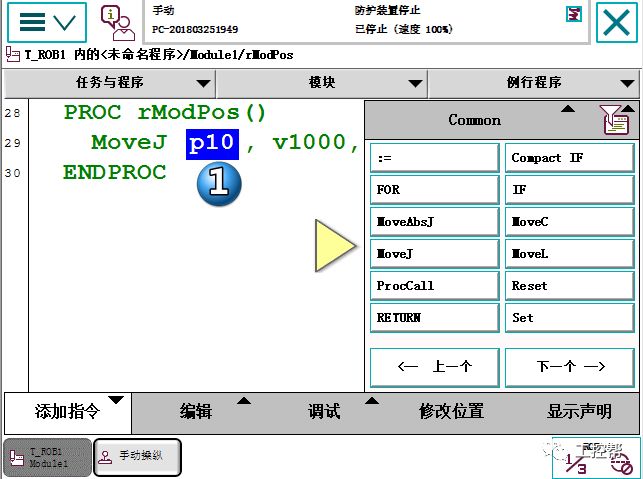
首先需要在需要对其的工作台上建立一个工件坐标系,这里工件坐标系建立在矩形体表面上。
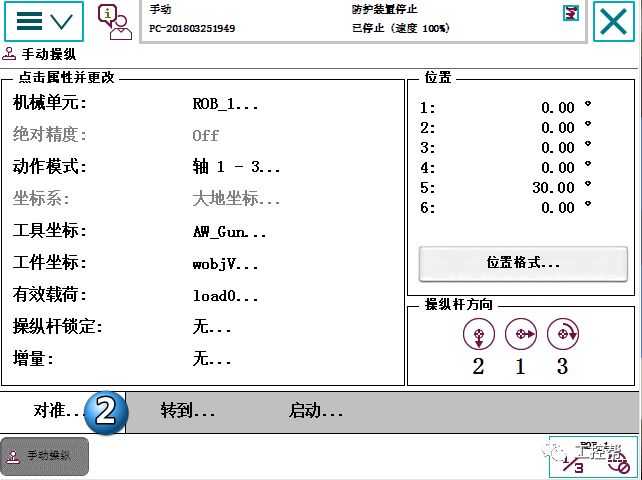
然后选择对准。
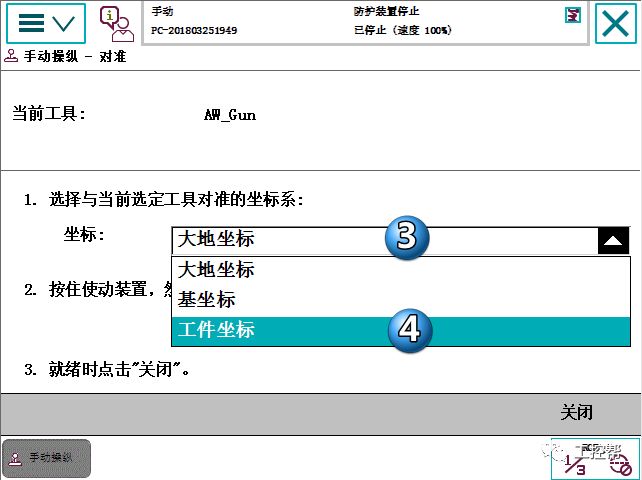
将坐标系选择为工件坐标。
按下使能按钮,点住开始对准,对准之后工具末端z轴就会垂直于工作台表面了。
3.对齐坐标系
有时候需要调整工具末端垂直于工作台表面,如果工作台表面有工件坐标系这一切就简单多了,我们有快速对正工件坐标系的方法,下面来一起学习一下。
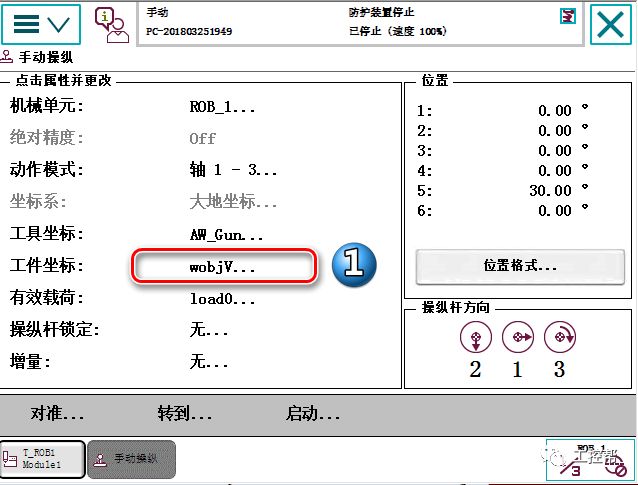
首先需要在需要对其的工作台上建立一个工件坐标系,这里工件坐标系建立在矩形体表面上。
然后选择对准。

将坐标系选择为工件坐标。
按下使能按钮,点住开始对准,对准之后工具末端就会垂直于工作台表面了。
4. 如何快速查找指令
ABB工业机器人指令很多,有的时候需要切菜单进行查找,很繁琐,这时候我们可以使用添加指令里面的过滤功能,达到快速查找指令的目的,以添加一条TPWrite指令为例,步骤如下。
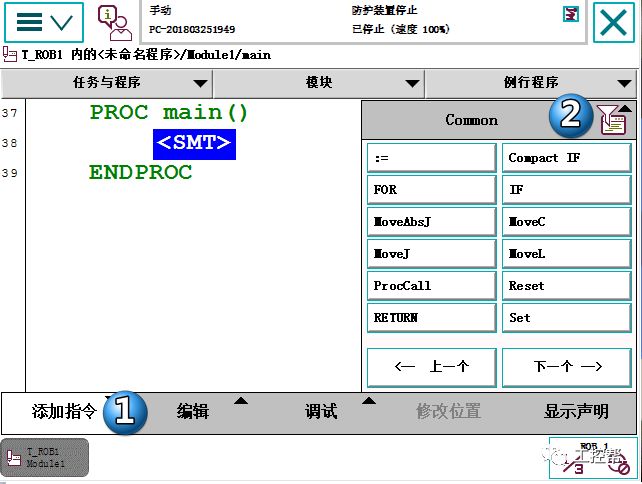
点击添加指令,选择指令菜单右上角的漏斗标识(有些旧版本没有,如果没有漏斗标识只能通过切换指令菜单来寻找指令)。

在活动过滤器输入框里面输入“TPWRITE”,鼠标左键单击“过滤器”。

这时候就能看见TPWrite指令了,点击即可添加。
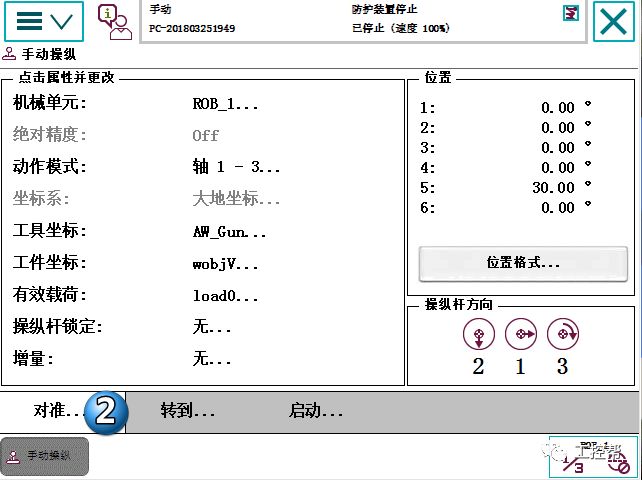
5.如何快速转到位置
在现场编程中我们有时候需要确认已经示教过点的位置,下面来学习一下转到位置的操作步骤。
首先要有目标点
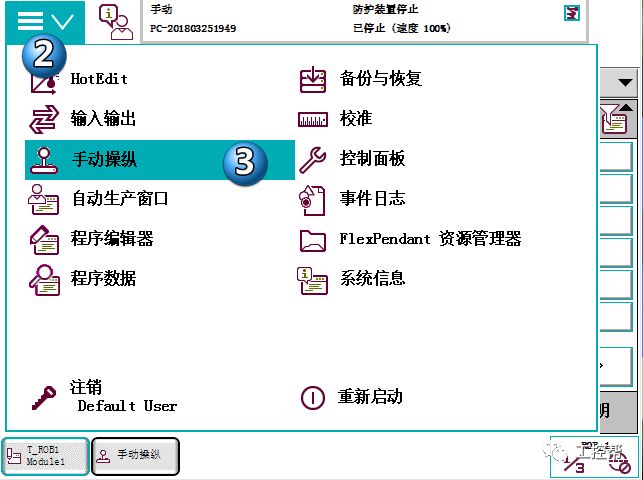
然后进入菜单点击手动操纵。
确认机械单元活动工具活动工件等信息之后打开使能,选中P10目标点点击转到。
-
编程
+关注
关注
90文章
3723浏览量
97439 -
工业机器人
+关注
关注
91文章
3551浏览量
98511 -
ABB
+关注
关注
26文章
573浏览量
57388
原文标题:ABB工业机器人经常忽略的实用技巧
文章出处:【微信号:GKB1508,微信公众号:工控帮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业显示器在3D缝纫机器人中的应用
工业显示器在医疗配送消毒机器人中的应用
突发!ABB机器人业务易主,软银53.75亿美元接盘
工业机器人的智能之选:永铭电容器解锁性能潜能

工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点

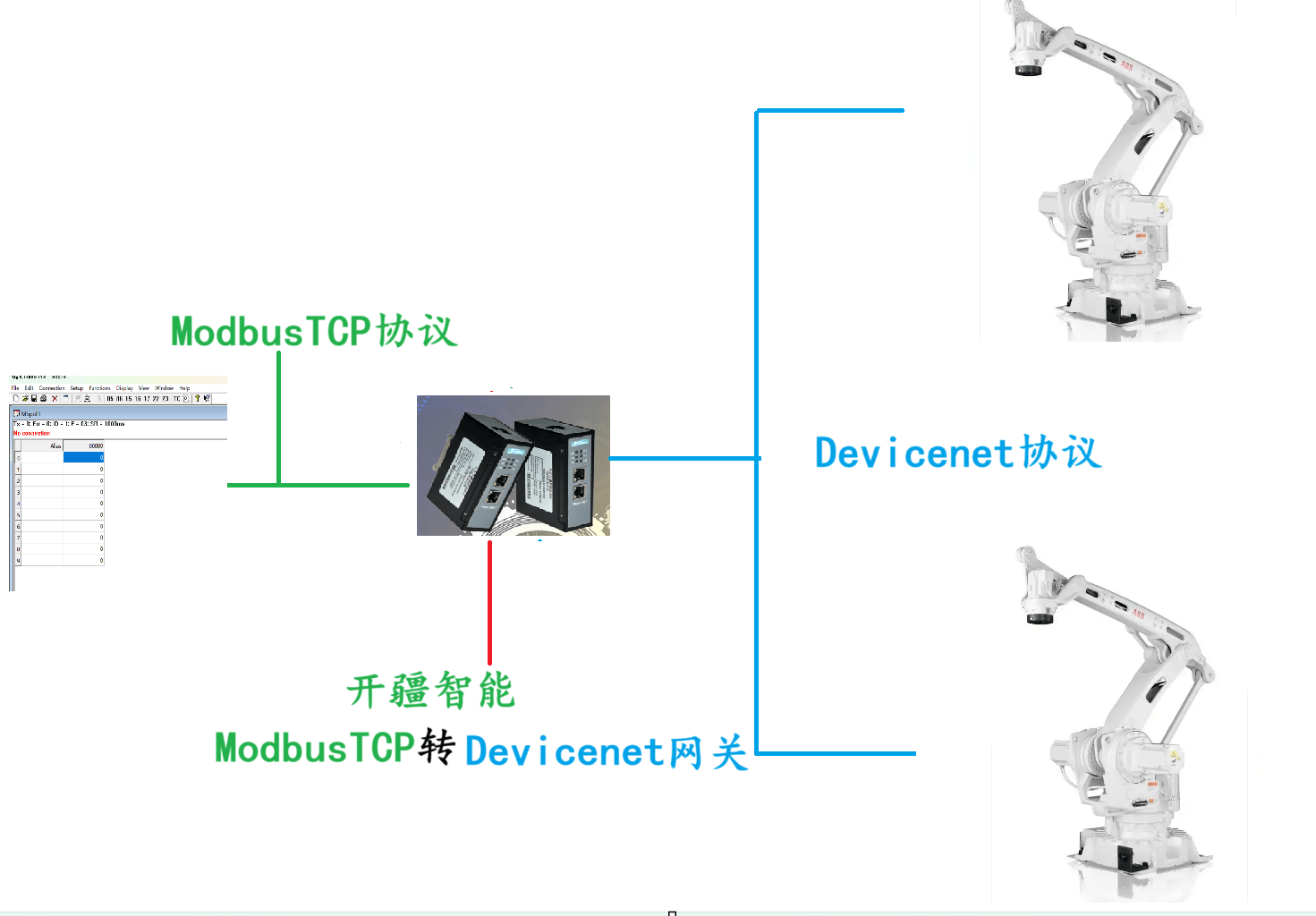
开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例

开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
工业机器人与协作机器人概念不同

开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例




评论