 79GHz将取代24GHz实现更佳的角度分辨率,有效提升感测精确性
79GHz将取代24GHz实现更佳的角度分辨率,有效提升感测精确性

毫米波雷达因频段介于厘米波与光波间,故同时具备光波导与电磁波导特性,在军事领域已被广泛应用。随汽车电子发展与自动驾驶需求,1999年Merccedes Benz率先将毫米波雷达应用汽车领域,此后车载毫米波雷达技术发展逐渐成熟,目前已成为ADAS关键传感器之一。相较于车载镜头与LiDAR,毫米波雷达受天候与光线影响程度较低,故其探测稳定度较佳,主要用于实现避障功能。
避免与其他设备频段冲突,车载雷达需要分配专属频段,各国频段画分略有不同,2005~2013年欧盟将24GHz作为车载毫米波雷达的频段,随后增加79GHz;而美国则使用24GHz、76~77GHz两个频段;日本系选用60~61GHz频段。各国车载毫米波雷达频段混乱的情况,使其发展受到限制,直至2015年WRC-15会议上,决议将77.5GHz~78.0GHz划分予无线电定位业务,从而使76~81GHz皆可用于车载雷达,为全球车载毫米波雷达发展提供支持。
车载毫米波雷达频段抵定,代表目前用于短距的24GHz将逐渐转由79GHz取代,对于车厂而言,除为符合国际频段标准外,79GHz亦可实现更佳的角度分辨率,进而提升感测精确性。
79GHz角度分辨率较24GHz佳的原因是目前载毫米波雷达多采用相控阵天线,天线设计方式取决于频段,即讯号的波长,波长愈短使用的发射天线愈小,故79GHz采用的天线尺寸较24GHz小,在相同尺寸下79GHz能够设计更多的收发阵列,形成较大的发射孔径与更窄的波束,借此以实现更佳的角度分辨率,惟较小的天线尺寸代表在制作工艺难度会比24GHz更高,故目前77/79GHz毫米波雷达市场多由国际Tier 1厂商把持。
车载毫米波雷达厂商着力于识别能力提升,缩短与光学传感器之差距
承如上述,车载毫米波雷达对于天候的适应能力较LiDAR与车载镜头更佳对于目标物仅有感知,并不具有识别功能,在ADAS中可实现AEB、BSD与ACC等应用,但要实现Level 3以上自动驾驶,仅有感知障碍物能力并不足够,故如何增加车载毫米波雷达对于感测物件的识别能力,缩短与光学传感器间的差距,已成为各厂商投入的重点方向,此亦为Metawave被众多车厂与Tier 1所看好的原因。
目前提升车载毫米波雷达识别能力主要方式包括合成孔径雷达技术(SAR)、结合微多普勒(Micro-Doppler)效应的自动目标识别(ATR)算法或与镜头整合等。
当然透过增加频宽、扩展天线尺寸、增加天线数量等以提升角度分辨率的方式,亦有助提升识别率,然而此类方案在传感器尺寸朝向小型化的发展趋势下,可发挥空间有限,使得车载毫米波雷达厂商多朝向SAR、ATR与结合镜头的研发方向发展。
-
adas
+关注
关注
311文章
2363浏览量
212329 -
自动驾驶
+关注
关注
795文章
15097浏览量
182223 -
毫米波雷达
+关注
关注
110文章
1193浏览量
66520
发布评论请先 登录
ADF4157:6 GHz 高分辨率分数 N 频率合成器的深度解析
探索BGT24LTR11N16 24GHz雷达MMIC:特性、电气参数与应用潜力
BGT24MTR12:24GHz收发器MMIC的技术剖析与应用指南
BGT24MTR11:24GHz收发器MMIC的详细剖析
普源精电发布16GHz带宽DHO50000系列高分辨率数字示波器
AWR1642:77/79GHz FMCW雷达传感器的卓越之选
探索AWR1443:77/79GHz FMCW雷达传感器的卓越性能与应用
AWR1843:77 - 79GHz单芯片FMCW雷达传感器深度解析
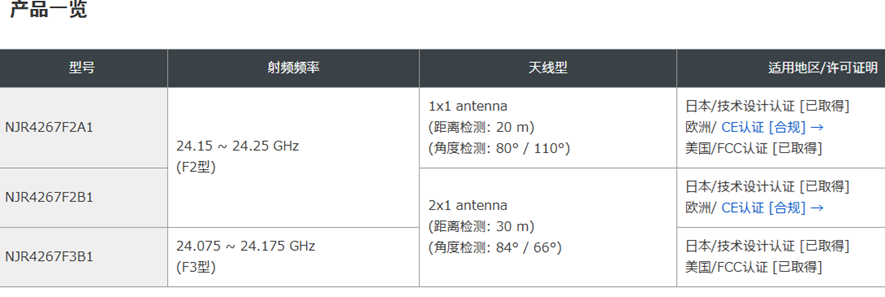
NJR4267系列 24GHz 移动检测/多普勒传感器, 数位输出, 高精度检测类型
雷达技术原理与典型应用:24GHz毫米波雷达及5.8GHz微波雷达分析

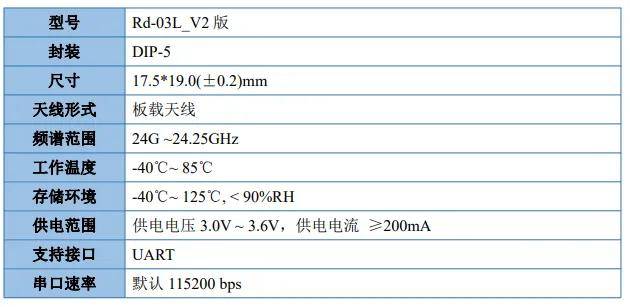
24GHz毫米波雷达模块:人体存在感知特点在智能家居应用的“技术解剖”
分辨率对于模拟到数字转换器有什么重要性
极细同轴线束是如何提升高分辨率成像的稳定性与清晰度的?
仅80μA!24GHz超低功耗,小体积人体存在雷达模组



评论