 传统机械臂遇瓶颈?为何GRID大模型让机器人自主决策产线变更?
传统机械臂遇瓶颈?为何GRID大模型让机器人自主决策产线变更?

精密制造领域内,传统单臂机器人面对复杂装配任务时的局限性日益凸显,而融合“手、脚、眼、脑”一体化设计的双臂人形机器人正在突破这一瓶颈。
在工业4.0的浪潮中,传统制造模式正面临效率与精度的双重挑战。面对多工序协同、精密操作及柔性换产等核心痛点,富唯智能以前沿技术推出双臂人形机器人解决方案,以仿生结构重新定义上下料场景的智能化边界。 通过“富智1号”、“富智2号”等系列产品,富唯智能已在汽车、电子、半导体、生命科学等关键领域实现规模化落地,为企业构建“零误差、无人化”的未来工厂提供核心引擎。

一、汽车制造业:双臂协同开启装配效率跃升
在汽车零部件装配线上,富唯双臂人形机器人展现了革命性的价值。其搭载双机械臂协同系统,重复定位精度高达±0.02mm-±0.05mm,结合3D视觉定位实现±0.2mm抓取精度。

这一技术特性直接解决了发动机装配中的同步操作难题:左臂固定7.8kg缸体,右臂同步执行螺丝拧紧与焊接,将原本8道工序压缩至双工位完成,效率提升40%,人力成本直降60%。
全球知名零部件厂商的实践印证了其效益——引入后生产线整体效率提升50%,产品一致性达到国际顶尖水平。
二、电子与半导体:微米级操作的“零误差”保障
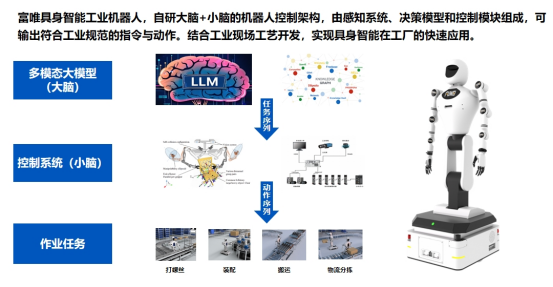
在电子芯片与半导体领域,传统人工操作面临微米级精度与洁净环境双重挑战。富唯机器人依托GRID大模型(具身智能工业机器人任务规划大模型)实现环境自适应决策:
在深圳某芯片工厂Class 100洁净车间内,双臂协同振动控制精度达0.02g,保障12英寸晶圆搬运零破损。
当突发气流导致传送带偏移时,系统实时重构路径,晶圆破片率从0.7%降至0.02%,年省损耗超2000万元。
贴片机上下料环节中,机器人以99.9%良品率完成微米级芯片抓取与贴装,颠覆传统分拣模式。
三、生命科学:无菌环境下的精准协作
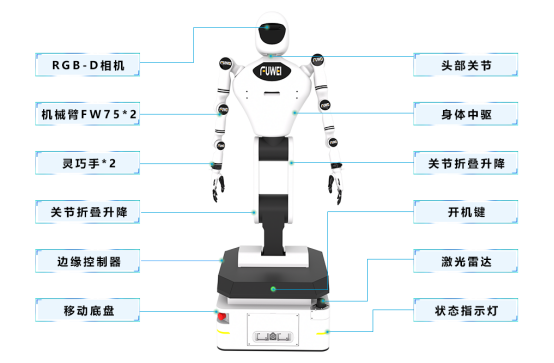
实验室场景对无污染操作与数据可靠性要求严苛。富唯机器人通过模块化躯干设计(升降高度0.6-1.8米可调)和渐进式安全机制,在试剂调配与样本转运中实现突破:

双臂协作完成液体转移与试管分装,杜绝人为接触导致的样本污染;
六维力传感器遇突发干扰时,10ms内触发关节力矩补偿,避免液体溅洒,确保实验环境完整性。
四、技术内核:刚柔并济的工业级设计
富唯智能的行业应用实效源于三大技术优势的深度融合:
1. GRID大模型:工业场景的“超级大脑”
融合语义地图与知识图谱,将物理环境转化为可推理的数字化空间;
支持长序列任务拆解(如“识别-抓取-装配-质检”),在30%产线变更下仍保持±5mm导航精度。
2. 刚柔并济的负载系统
富智1号双臂负载达8kg,覆盖90%工业零部件重量需求;
碳纤维轻量化结构实现自重与负载比1:0.4,确保重载下±0.02mm定位精度。
3. 零代码柔性部署
ForwardControl系统支持拖拽式编程,新任务调试时间从数周压缩至15分钟;
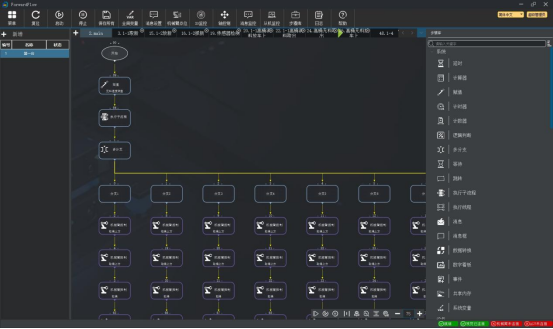
同一设备可白天装配手机主板,夜间切换搬运电池模组,设备利用率达92%。
东莞某电路板厂的深夜车间内,富唯双臂机器人以0.2毫米精度将芯片嵌入电路板,同时移动底盘承载300公斤原料箱穿梭于设备间——这种“精密操作+重型转运”的能力,正是现代柔性制造的缩影。
全球工业客户已见证其价值:从汽车产线40%的效率跃升,到半导体车间千万级成本节约,富唯智能的双臂人形机器人正以仿生结构、自主决策、极速重构三大内核,推动制造业向无人化、高柔性、零误差的未来加速进化。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31452浏览量
223678 -
大模型
+关注
关注
2文章
3772浏览量
5273
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
EtherNet/IP转CANopen——焊装产线的“协议破壁人”:让机器人听懂焊机

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
解放CNC产线的全能伙伴:一体复合机器人开启智能上下料新篇章

为什么复合机器人是未来无人化工厂的核心设备?

复合机器人对比传统AGV和机械臂的优势何在?

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
工业人形机器人电池更换:富唯智能引领柔性制造新变革
RDK × 腿臂机器人:这只 “机械汪” 竟会说人话、走花路!

GRID大模型:富唯智能人形机器人的“工业大脑”革命

大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品




评论