 固态LiDAR与机械LiDAR该如何选择
固态LiDAR与机械LiDAR该如何选择

Velodyne在2000年代中期发明了现代3D(三维)LiDAR(激光雷达)扫描仪。但近年来,传统观念认为,Velodyne的设计(将64个激光器安装于一个旋转平台)很快将被新一代固态LiDAR传感器淘汰,这类固态传感器仅使用单个固定激光器进行场景扫描。但是一家名为Ouster的创业公司正试图挑战这一观点,正以极具竞争力的价格销售类似Velodyne的旋转式机械LiDAR。
近期,我们有幸与Ouster首席执行官Angus Pacala进行了对话,他对旋转式和固态LiDAR之间的优劣权衡有着独到的专业见解,因为Pacala之前曾是固态LiDAR最著名的创业公司——Quanergy的联合创始人。在我们的谈话中,Pacala拒绝了评价其前任公司。但行动胜于雄辩。我们可以认为,作为Quanergy的联合创始人,Pacala肯定非常了解固态LiDAR技术的优缺点。而当他决定创建另一家LiDAR公司时,他决定不再做固态LiDAR,这或许能说明一些问题。“固态LiDAR”实际上是一类涵盖几种非旋转式机械LiDAR设计的总称。
主要可分为三种技术方案:一种为MEMS(微机电系统)方案,采用微型MEMS扫描镜来控制激光束;另一种,采用称为光学相控阵的技术来控制激光束,而无需任何运动部件;第三种,则被称为泛光(Flash)成像LiDAR,无需光束转向,只需一次闪光即可照明整个场景,再通过类似于数码相机的二维阵列图像传感器探测返射回来的光线。Pacala此前创办的Quanergy虽然没有详细公开解释其技术细节,但是根据报道判断,该公司主要采用的是光学相控阵方案。由于很微小或没有移动部件,所有这三种设计方案都可能带来更坚固、更经济的LiDAR传感器。
从长远来看,业内倡导将几乎所有的电子器件(包括激光器本身、光束控制电路、检测器和运算支持)都集成封装在一起。因而,未来消费类产品中的固态LiDAR很可能将不像旋转式机械LiDAR那样,必须突兀地安装在汽车顶部才能正常工作。这在理论上听起来不错,Pacala在2012年联合创立Quanergy公司时大概也是这么认为的。但是,后来他显然改变了想法,因为他的第二次LiDAR创业,采用了更传统的旋转式机械LiDAR方案。
旋转式机械LiDAR有其独特优势Pacala指出了传统旋转式机械LiDAR设计的几大优势。其中,最明显的优势是其360°视场。 我们可以在汽车顶部固定安装一个激光雷达,从而360°地感知汽车周围的情况。相比之下,固态LiDAR需要固定在某些适当的位置(例如车身前后方或四角),视场角一般在120°或以内。因此,自动驾驶汽车采用固态LiDAR传感器,至少需要4台才能达到跟旋转式机械LiDAR一样的覆盖范围。另一个不太明显的优势是,人眼安全法规允许运动的激光源发射比固定激光源更高的功率。
据Pacala介绍,所有1级安全系统的设计必须确保人员不眨眼直视激光设备数秒钟,仍然不会受到伤害。当采用固态扫描单元时,如果人眼处于激光扫描器几英寸的地方,可能会导致100%的激光射入眼内。但是如果采用旋转式LiDAR传感器时,激光只集中于某个特定的方向,只有360°旋转的一小部分。因此,旋转式LiDAR可以为每个激光脉冲提供更高的功率,而不会造成眼睛损伤。这样可以更容易地检测到返射光,因此在可预见的未来,旋转式LiDAR单元可能要比固态LiDAR单元具有更大的探测范围优势。
上图为谷歌早期的自动驾驶原型车。车顶有一个巨大的旋转式LiDAR传感器,前翼子板上有个黑色的雷达(共4个),后轮上安装有“车轮编码器”,车内还有视频摄像头。这款原型车装配的各类传感器总价高达15万美元同时,大部分领先的固态LiDAR设计,都面临着“远距离探测”这个显著的挑战。MEMS系统中的微型扫描镜能投射的激光量有限。这使得远处物体反射激光束并被探测的难度很大。光学相控阵方案相对于其它技术,产生的光束发散性更大,因此很难兼顾长距离、高分辨率和宽视场。
而对于泛光成像LiDAR,每次发射的光线会散布在整个视场内,这意味着只有一小部分激光会投射到某些特定点。此外,光电探测器阵列中的每个像素都必须非常小,限制了它可以捕捉的反射光量。“固态LiDAR方案挑战很大,” Pacala表示。他提出,传统旋转式LiDAR技术拥有独特的优势,在接下来的十年将继续保持一定的市场地位,尤其是在高端市场。据Pacala预测,绝大部分LiDAR系统将在未来十年逐步转为固态方案,但是,仍将会有一些具有真正高性能和高价值的旋转式机械LiDAR传感器。Pacala用硬盘市场做了一个有趣的比喻。
15年前左右,固态存储设备越来越受欢迎,特别是在移动设备中。然而,时至今日仍然有大量具有旋转磁盘的传统硬盘驱动器正在销售。因为,这种设计提供了高容量和低成本的完美组合。同样,Pacala预计未来的低端激光雷达设备将大多采用固态设计,就像今天的大部分移动设备都采用固态存储一样。但对于要求最苛刻的应用(包括自动驾驶汽车),他预计高端旋转LiDAR还将占据重要的市场位置,提供远距离、高分辨率和更宽广的视野。Ouster对Velodyne带来了价格压力虽然Ouster采用了与Velodyne相同的基本技术方案,但Ouster提供了透明且激进的定价方案,这可能会让Velodyne略感头疼。
64线OS-1在展会现场的实时演示据麦姆斯咨询此前报道,Ouster目前提供了三种LiDAR型号:一款低端的16线LiDAR传感器OS-1,售价3500美元,一款64线OS-1版本,售价12000美元,以及一款探测距离更长的64线传感器OS-2,售价24000美元。
那Velodyne的产品售价如何?Velodyne的16线LiDAR“传感冰球”的售价为4000美元,这与Ouster的3500美元16线机型大致相当。就在去年12月,福布斯报道称,Velodyne老款64线机型的售价仍然高达75000美元,仅比10年前的85000美元略有降幅。当Velodyne总裁Marta Hall被问及Velodyne的HDL-64E与64线OS-1的价格比较时,她回答道:“Velodyne的HDL-64E是十年前开发的产品,自那时起,Velodyne已经做出了很多改进。请将Ouster 的LiDAR产品跟Velodyne最新的128线LiDAR传感器VLS-128比较才够合理,VLS-128的批量定价将是12000美元或以下。”的确,VLS-128比Ouster的OS-1拥有更惊人的参数规格。Velodyne这款高端LiDAR单元具有更大的探测范围,比Ouster售价24000美元的OS-2更加吸引人。
拥有一台VLS-128的成本将是多少?Hall表示它目前“尚未定价销售。”当然她也没有明确表示大批量客户现在是否可以拿到12000美元或更低的价格。说到底,LiDAR单元的单价并不重要。所有这些LiDAR厂商的长期目标,是以数千甚至数百万台为单位出售这些传感器,用于消费级车辆。批量采购LiDAR的汽车制造商,肯定能从单个价格中获得很大折扣。但是,像Ouster那样公布立即交付的具体价格有助于建立信誉。我们相信Velodyne将会尽一切努力在未来的某个时间点,匹配Ouster打出的12000美元价格牌。
但是,未来要做到这一点,与今天能够做到这一点并不是一回事,不是吗?LiDAR创业公司Luminar首席执行官Austin Russell对于LiDAR成本问题,也表示:“对于消费级汽车来说,这类LiDAR系统的售价的确需要低至小几千美元或以下”,并承诺价格对Luminar来说不是问题。听Austin Russell的意思,Luminar的LiDAR传感器似乎还没有达到“小几千美元”的价格目标,目前实际上可能要比那个目标数字更高。
总的来说,通过与Ouster首席执行官Pacala的交流,使我对LiDAR成本很快能够得到大幅降低持谨慎乐观态度。不过,价格确实正在下降,正如Velodyne今年宣布16线产品降价50%。如果你愿意接受探测范围略小、分辨率更低的LiDAR解决方案,你可以找到售价几千美元甚至几百美元的LiDAR单元。
但是,市场上最好的LiDAR单元(可能也是唯一能真正支持全自动驾驶汽车的那些LiDAR单元),仍然需要花费数万美元。值得注意的是,另一个LiDAR技术主要竞争厂商Waymo。这家Alphabet(谷歌)子公司近十年一直在研究自动驾驶汽车,他们已经从使用Velodyne的LiDAR系统转为采用他们自己生产的LiDAR技术。并且,该公司仍在使用相同的传统旋转式机械LiDAR方案,但据报道,Waymo已经研究出如何将LiDAR单元的成本降低10倍。由于市场没有公开Waymo的原始成本数据,因此无法判断其产品的具体价格,但可以肯
定的是,Waymo的LiDAR单元成本不会超过8500美元,并且有可能少于这个数字。如果你不是一家像Waymo这样的公司,那自己解决这个问题可能很困难。一款产品再复杂,只要产量上去了,价格自然会下降。目前,LiDAR传感器的市场需求只是未来五到十年内的一小部分,到了那时无人驾驶出租车公司将开始大举扩大车队规模。随着LiDAR生产规模的扩大,制造技术的不断改进以及规模经济所带来的影响,LiDAR传感器势必会越来越便宜。
-
传感器
+关注
关注
2577文章
55505浏览量
793963 -
LIDAR
+关注
关注
11文章
368浏览量
31596
原文标题:选择固态LiDAR还是机械LiDAR?听听Ouster公司CEO怎么说!
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
激光雷达LiDAR技术的工作原理和应用场景

深入解析LMH32401:一款适用于LIDAR的高性能跨阻放大器
探索LMH32404:一款适用于LIDAR的四通道跨阻放大器
探索MAX40662:用于LiDAR的四通道跨阻放大器
MAX40658/MAX40659:适用于LiDAR的跨阻放大器
MAX40213跨阻放大器:LiDAR应用的理想之选
LiDAR线圈如何驱动无人驾驶技术
智驾感知系统中立体视觉相对于LiDAR的性能优势

激光雷达创新思路:机械扫描+Flash合二为一

恒利泰T/R组件:模块设计工程师必知干货
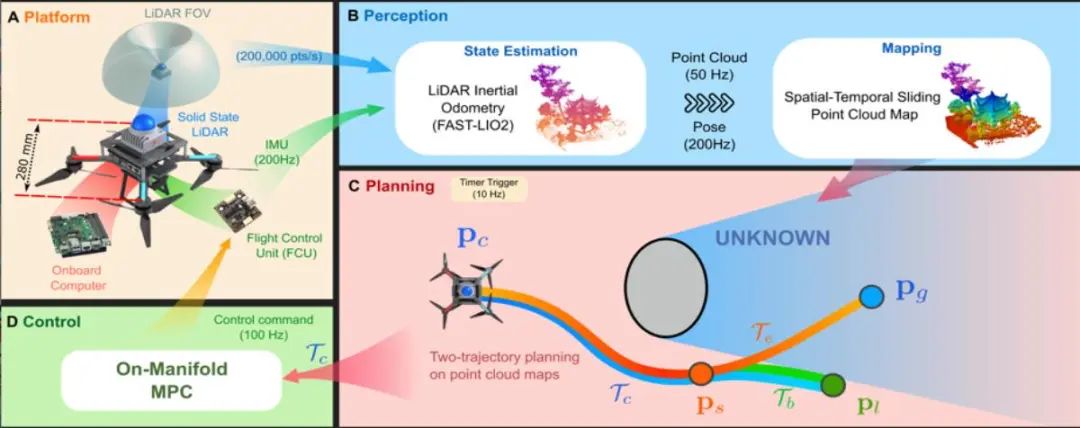
港大开发新型无人机飞控,LiDAR传感器采集信息传至云端生成路径
Jtti.cc服务器用固态硬盘还是机械硬盘比较好?服务器硬盘挑选指南
自动驾驶中纯视觉替代不了激光雷达?
机械、半固态、全固态激光雷达有何区别?谁更适合自动驾驶?

SONY推出新型dTOF激光雷达(LiDAR)深度传感器AS-DT1



评论