 机器人步态的选择以什么步态移动最节能?
机器人步态的选择以什么步态移动最节能?
步态的选择,也就是我们是走路还是跑步,对于我们来说是非常自然的事,我们甚至都未曾想过它。我们慢慢地走路,快速地奔跑。如果我们在跑步机上慢慢加快速度,我们就会从一开始的慢慢走路,在某个临界点变成跑步;这一切地发生都是不由自主地,因为那样感觉更舒服。
我们已经习惯了这一点,当我们看到奥运会赛道上有人快速地走路时,就会觉得特别有趣。几乎所有动物都会自动选择步态,尽管有时步态不同。例如,马往往以慢速行走,以中速疾驰,以高速驰骋。是什么让我们觉得低速适合行走,高速适合跑步呢?我们怎么知道我们必须改变选择,为什么我们不像马那样跳跃或驰骋呢?究竟是什么构成了走路、跑步、小跑、疾驰以及其他可以在自然界找到的步态?
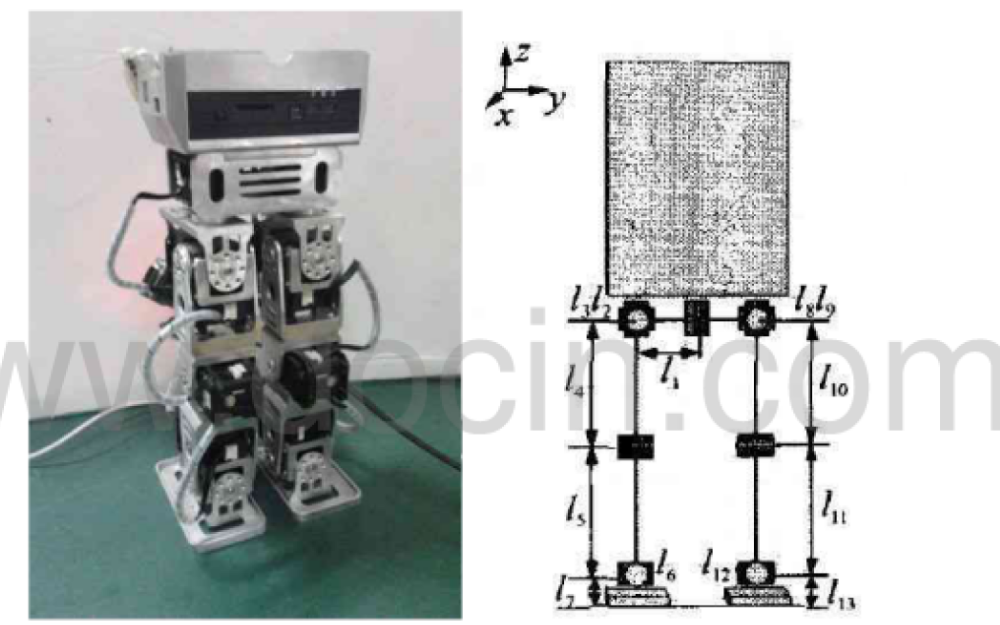
密歇根大学机器人与运动实验室(RAM-Lab)的C. David Remy博士领导的研究团队对此及相关问题非常感兴趣,原因非常简单:他们希望打造敏捷、快速而节能的腿式机器人。使用不同步态的能力可能是这项任务中的关键因素,因为对人类和动物有益的可能对腿式机器人同样有利。
这仍然是一个很大的“可能”,因为我们目前不知道使用不同的步法是否会真正获得回报,或者机器人适合的步态看起来如何。它们会以某种形式的走路或跑步,还是一些完全不同的东西?
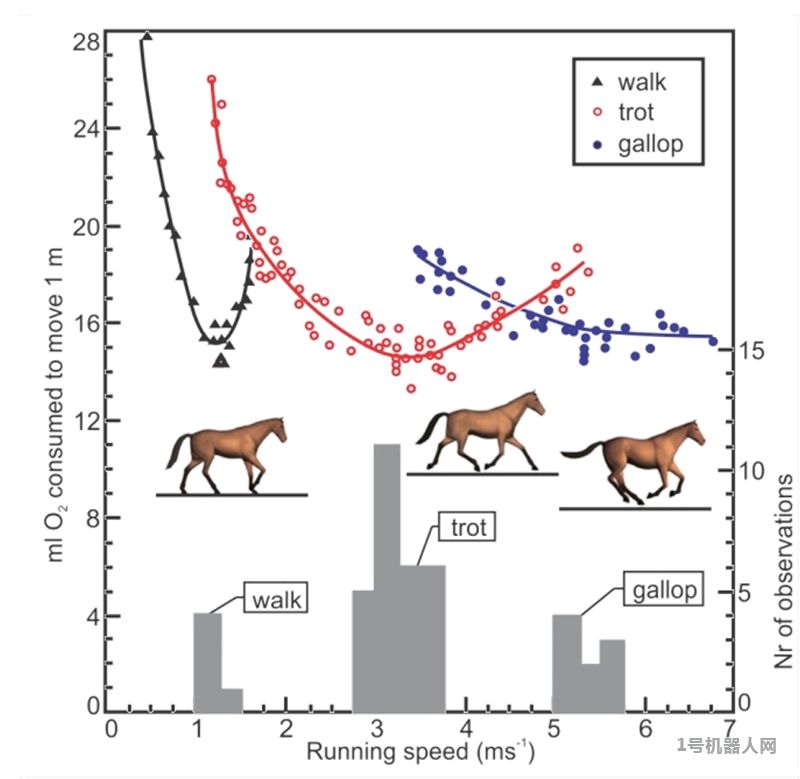
在自然界,生物力学研究表明,步态的选择与运输的能量成本密切相关。这个成本表明移动特定距离需要消耗多少卡路里。对许多动物而言,这是一项重要措施,食物往往是稀缺资源,高效的运动可能是生存的关键。
为了理解步态对运输成本的影响,研究人员可以通过测量人或动物在使用不同步态行走时消耗的氧气量来估算能量消耗。使用这种技术已经表明,在低速状态下,只需要较少的能量就可以走路,而在高度下,跑步所使用到的能量反而更少。
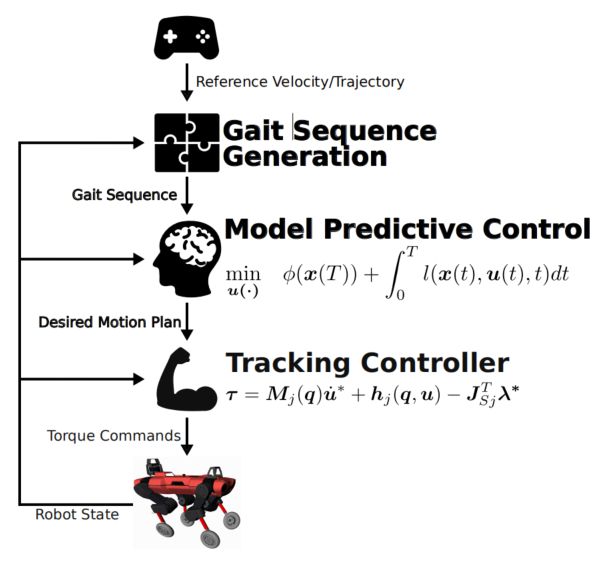
为了了解机器人是否也能实现同样的节能,Remy博士的团队使用大规模的数值优化。也就是说,在建立了一个腿式机器人的计算机模型后,他们基本上要求一种算法来自动找到最有效的经济的前进方式。也就是说,他们发现成本最小化的运动。
计算机通过简单地尝试以一种系统化的方式解决这个难题,使用模型腿向前移动的任何可能方式。这些优化的结果非常显着。即使计算机没有先前的走路、跑步或步态的概念,通过此过程出现的最佳运动与自然界中发现的步态和步态序列非常相似。
通过改变每个运动的目标速度,然后可以识别最佳步态序列。令人惊讶的发现是,基本上没有惊喜:为了以尽可能少的能量移动,双足机器人应该以低速走路和高速跑步;四足机器人则要分走路、疾驰和驰骋。值得注意的是,尽管动物和机器人在结构和动作方面存在巨大差异,但仍然发现了这一结果。
-
机器人
+关注
关注
206文章
27064浏览量
201449
原文标题:机器人以什么步态移动最节能?
文章出处:【微信号:robot-1hjqr,微信公众号:1号机器人网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【Embedded Pi申请】六足机器人的创新研发
什么是龙人四足机器人?
自动步态识别系统如何实现?
开源资料六足仿生机器人(原理图+PCB+源码等)
分解式虚拟模型步态算法VMC介绍
日本推出弱力四足机器人,能自动生成步态
怎么样实现双足机器人参数化步态规划详细方法说明
腿+轮式动力!瑞士四足机器人展示最佳混合步态、运动更灵活
四足机器人步态规划与接触状态

四足机器人的步态规划测试代码





 工商网监
工商网监
评论