 PCIe EtherCAT实时运动控制卡PCIE464点胶工艺中的同步/提前/延时开关胶
PCIe EtherCAT实时运动控制卡PCIE464点胶工艺中的同步/提前/延时开关胶

一.硬件介绍
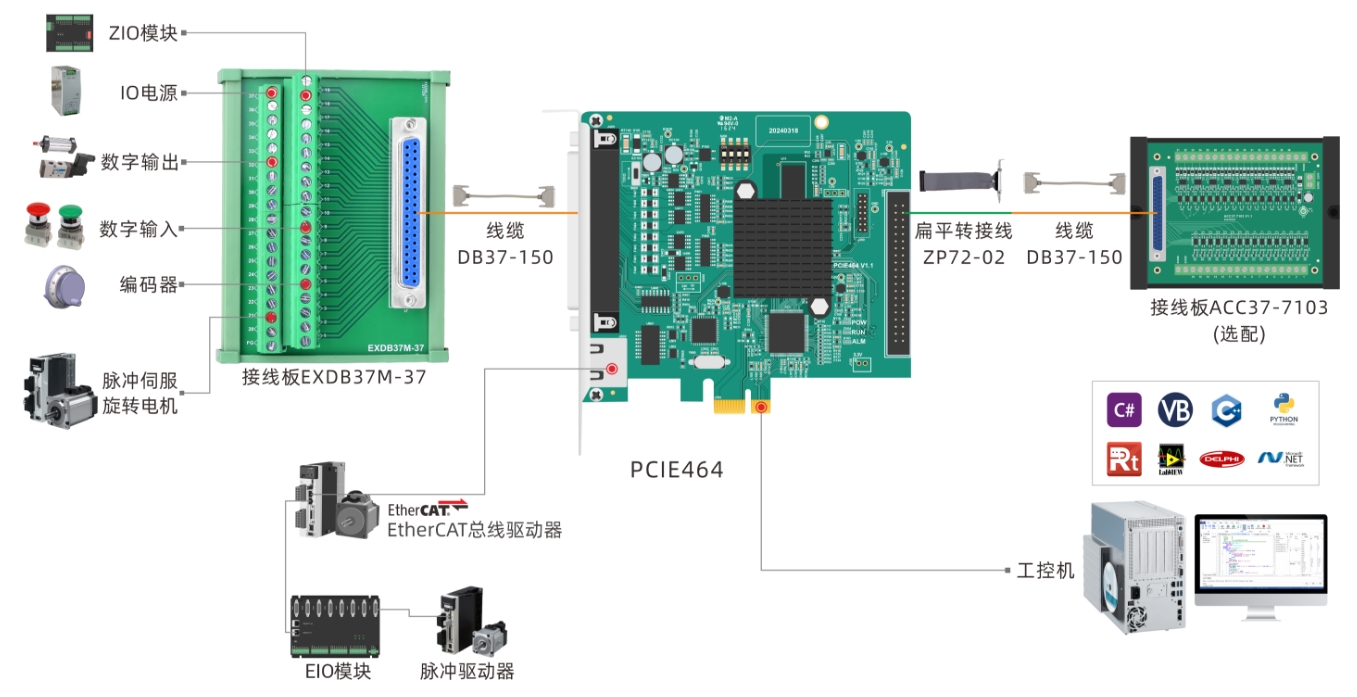
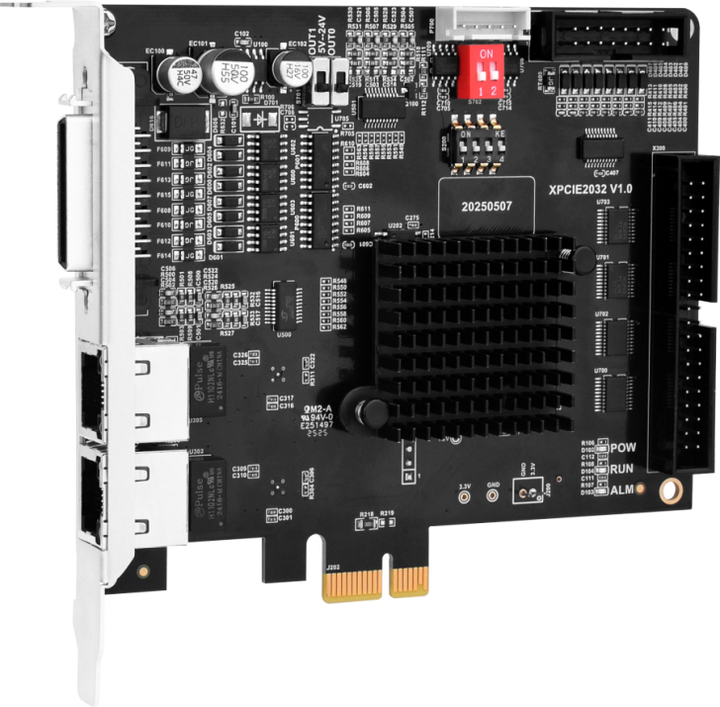
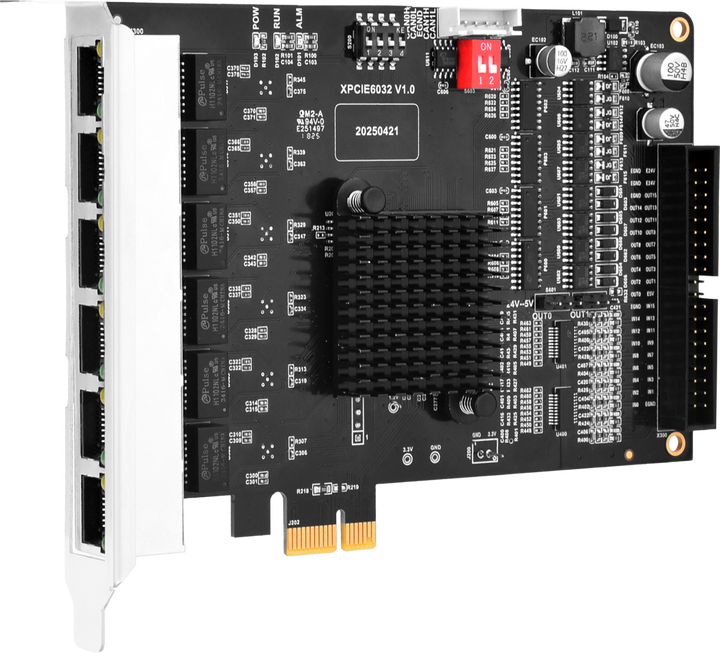
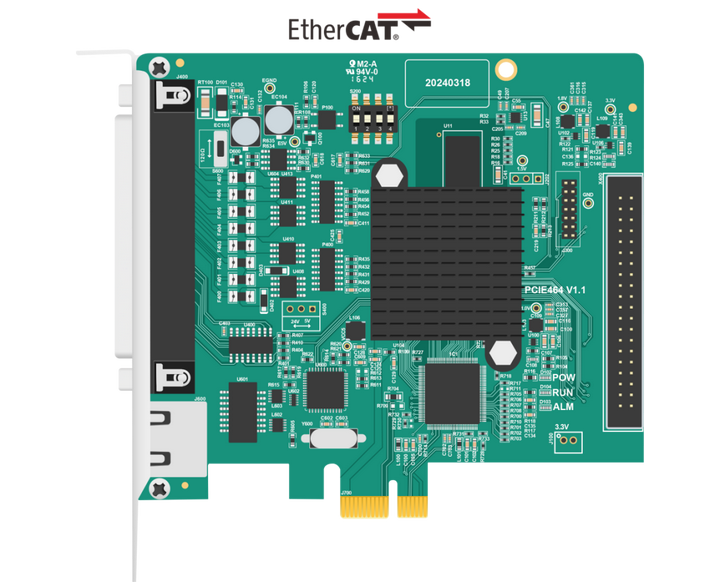
PCIE464运动控制卡是正运动推出的一款EtherCAT总线+脉冲型、PCIE接口式的运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。
PCIE464运动控制卡适合于多轴点位运动、插补运动、轨迹规划、手轮控制、编码器位置检测、IO控制、位置锁存等功能的应用。PCIE464运动控制卡适用于3C电子加工、检测设备、半导体设备、SMT加工、激光加工、光通讯设备、锂电及光伏设备、以及非标自动化设备等高速高精应用场合。
PCIE4系列控制卡的应用程序可以使用VC,VB,VS,C++,C#等软件开发,程序运行时需要动态库zmotion.dll,调试时可以将RTSys软件同时连接控制器,从而方便调试、方便观察。

更多关于PCIE464的详情介绍,点击“PCIE464 — 高速高精,超高实时性的PCIe EtherCAT实时运动控制卡”查看。
二.接线参考
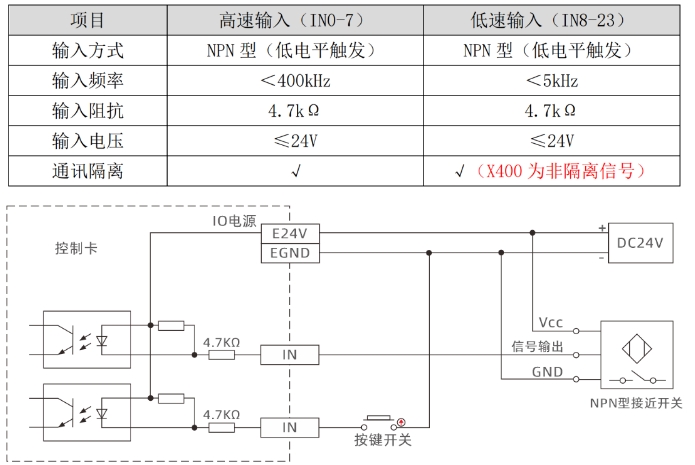
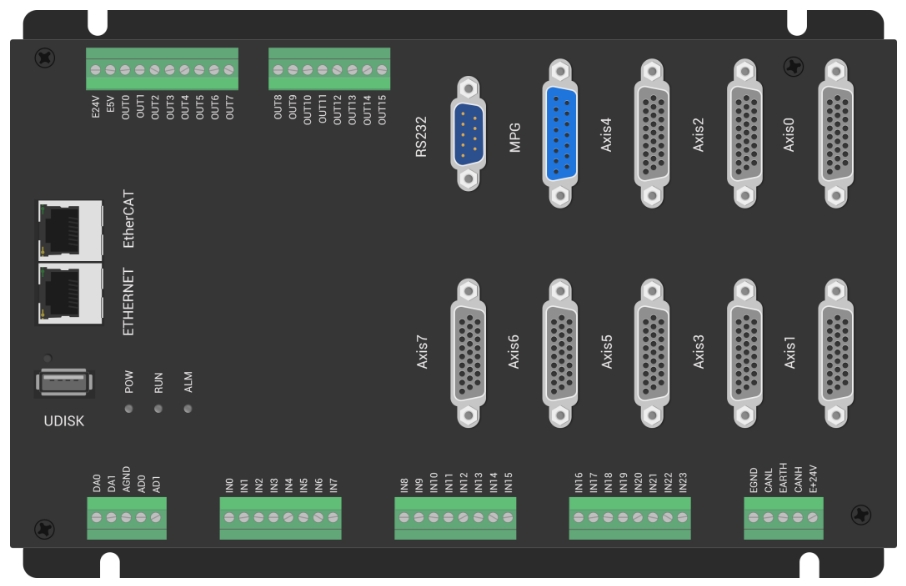
1.IN数字量输入接口
数字输入分布在J400(IN0-IN7)和X400(IN8-IN39)信号接口中。
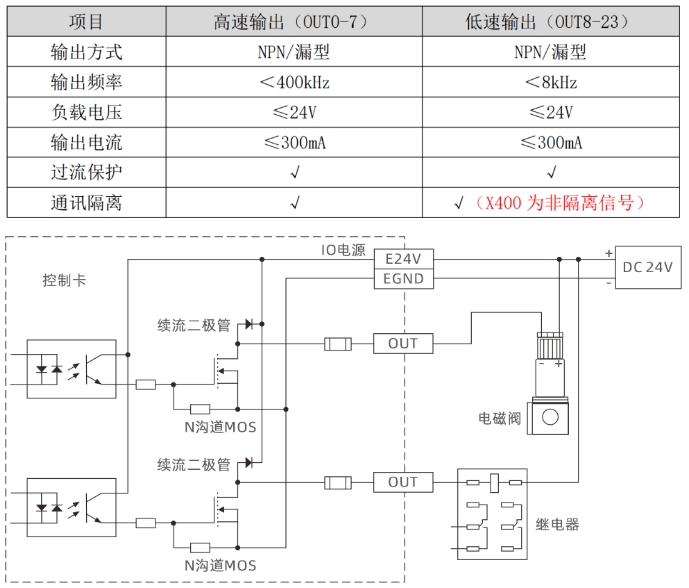
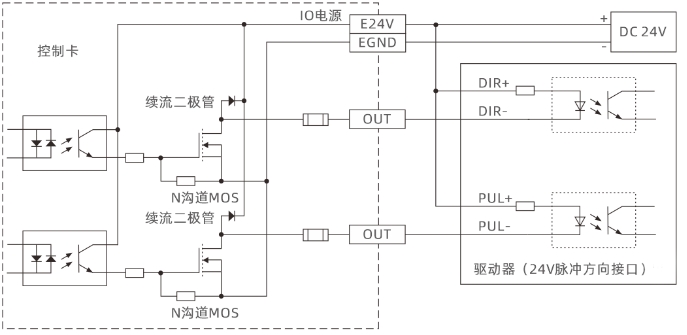
2.OUT数字量输出接口
数字输出分布在J400(OUT0-7)和X400(OUT8-OUT39)信号接口中。
3.单端编码器及单端脉冲接线
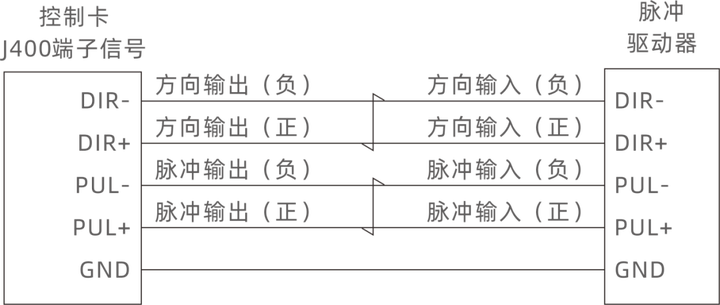
 单端脉冲接线图
单端脉冲接线图
 差分脉冲接线图
差分脉冲接线图
 单端编码器接线图
单端编码器接线图
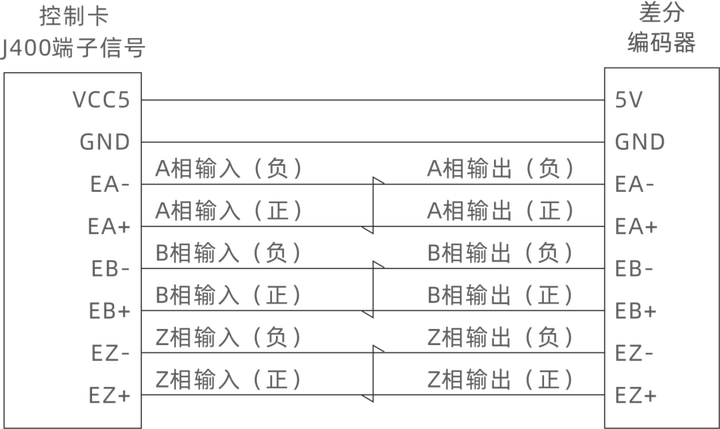 差分编码器接线图
差分编码器接线图
注:PCIE464的J400接口中有一个差分脉冲轴接口和三个单端脉冲轴接口,两个差分编码器接口(其中一个与差分脉冲轴接口复用,取决于固件设定)和两个单端编码器接口,具体引脚定义参见PCIE464硬件手册。
三.使用运动缓冲实现同步/提前/延时开关胶
1.运动缓冲
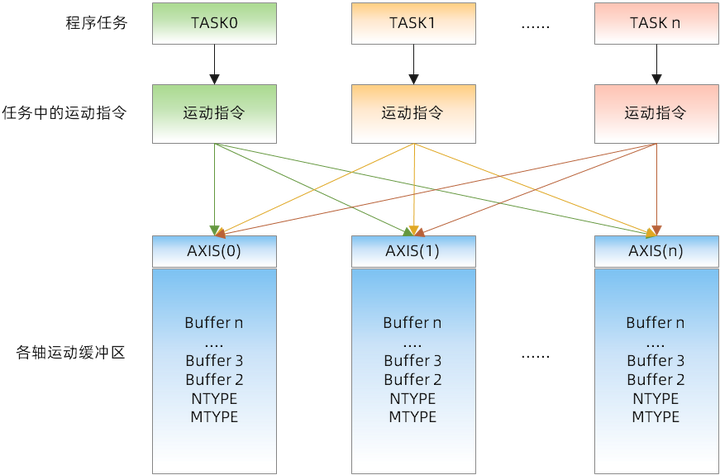
ZMotion运动控制器具有多级的运动缓冲,并且遵循先进先出原则。当运动缓冲开启的时候,程序在扫描识别到程序任务的第一条运动指令时,将运动指令分配到指定轴的运动缓冲区,电机开始运动,此时程序继续向下扫描到第二条运动指令时,再往运动缓冲区中存,在不断扫描存入运动指令的同时,从运动缓冲区中依次取出运动指令执行。
运动缓冲原理参考下图:
①MTYPE,NTYPE分别是当前运行的运动指令类型和MTYPE后面的第一条指令类型。
②任意一段程序的运动指令都可以进入任意轴的运动缓冲区,由轴号指定。
③每个轴的运动缓冲区都是独立的,互不干扰。
如下图:当运动缓冲区还有空间,运动指令就会进入运动缓冲区。然后可以通过MOVE_MARK设置标识,表示下一条要调用的运动指令的MARK标号,这个标号会和运动指令一起写入运动缓冲。等指令执行完成后,则退出运动缓冲区,之前的下一条指令变成正在运动指令,循环往复,直到缓冲区没有指令去执行。
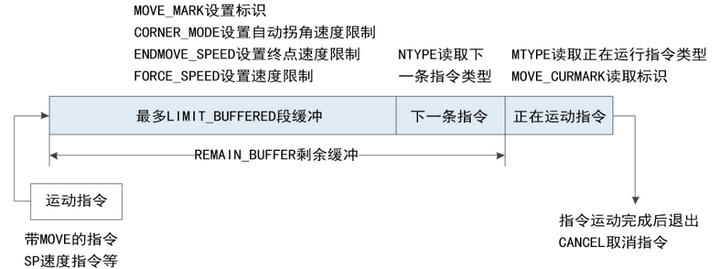
缓冲多条运动指令时,为了判断当前运动执行到哪一条,提供MOVE_MARK运动标号和MOVE_CURMARK当前运动标号指令。 MOVE_MARK运动标号每扫描一条运动指令+1。 MOVE_CURMARK指令为当前运动的标号,提示当前运动到第几条运动指令,所有运动完成后为-1。 当前运动完成后会自动执行运动缓冲区内的下一条运动。运动指令全部执行完后,运动缓冲区为空,或者使用CANCEL/RAPIDSTOP指令清空运动缓冲区。
2.使用到的运动缓冲指令以及Basic效果演示
在点胶的应用场景中,运动控制系统需要精准调节点胶阀开闭时机与针头运动轨迹,通过开胶延时,关胶延时,提前关胶等参数,确保胶量精准可控,满足工艺要求。 正运动技术提供了MOVE_OP等运动缓冲中控制输出的指令,用来实现点胶工艺中的同步/提前/延时开关胶功能。
(1)运动缓冲开关OP指令(MOVE_OP -- 缓冲输出)
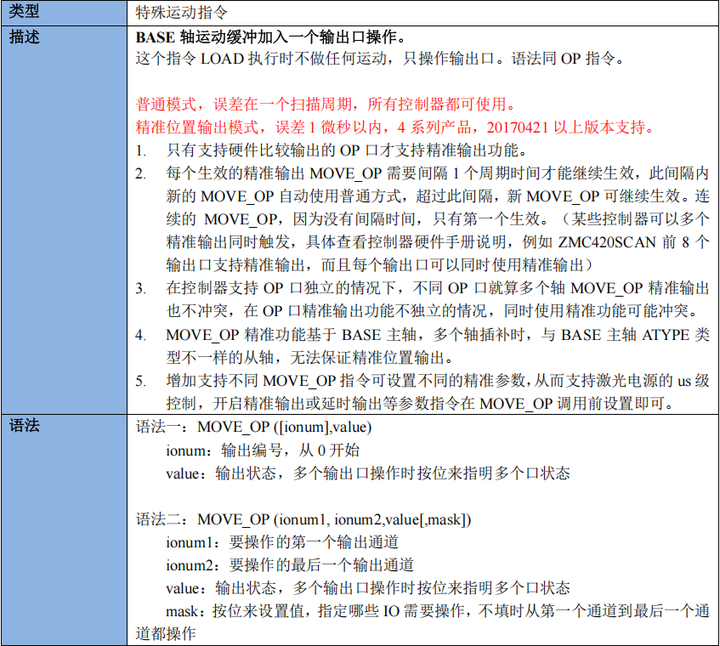
MOVE_OP指令和MOVE/MOVEABS等指令一样属于运动指令,属于只操作I/O的特殊运动指令,并不会阻塞后续运动指令的执行。 MOVE_OP指令与MOVE/MOVEABS等缓冲运动指令配合时可以实现在运动过程中指定位置同步开关胶。
Basic效果演示:
BASE(0,1) '依次例如点胶XY轴 UNITS = 1000000,1000000 SPEED = 100,100 ACCEL = 1000,1000 DECEL = 1000,1000 MPOS = 0,0DPOS = 0,0 MERGE = 1 OP(0,OFF) TRIGGER MOVEABS(100,100) '开胶点100,100 'XY走轨迹 MOVE_OP(0,ON) MOVE(0,70) MOVE(-100,0) MOVE(0,-70) MOVE(50,0) MOVEABS(100,100)'关胶点 MOVE_OP(0,OFF) MOVEABS(0,0)
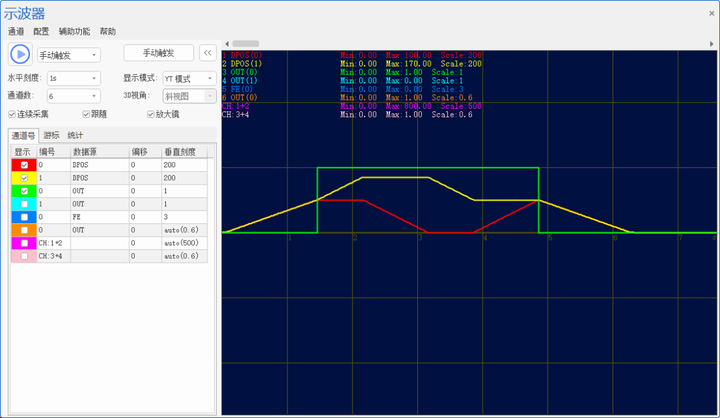
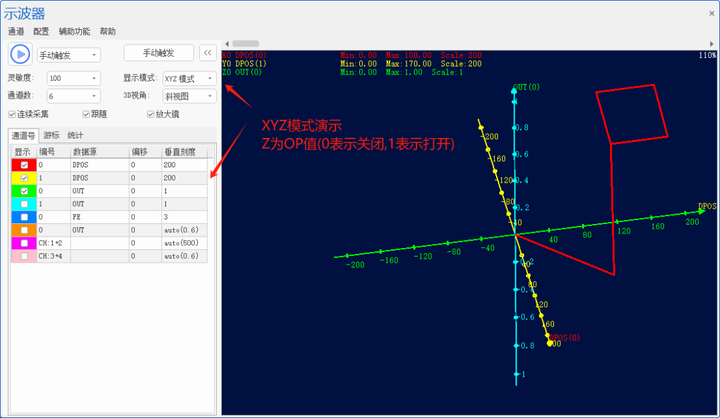
可以看到xy插补的时候,先运动到100,100打开OP,走完一个长方形轨迹后,再到100,100的位置关闭OP。
(2)MOVE_OP精准输出模式
实际点胶应用中有时精度要求比较高,用普通MOVEOP是比较指令位置(DPOS)满足不了要求,这时候我们需要开启MOVEOP精准模式。 开启精准模式后,MOVEOP执行时会在缓冲比较编码器位置(MPOS)到达前一条运动的目标位置再输出。
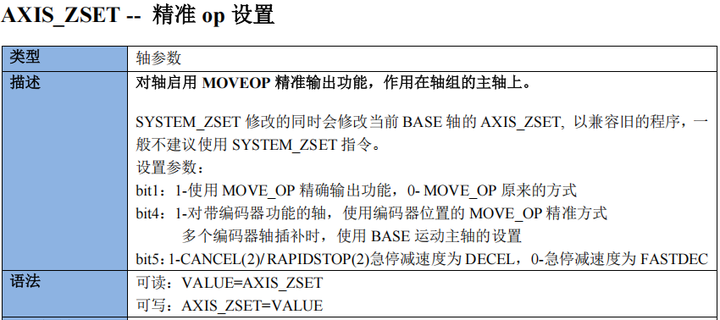
能够开启精准模式的OP需要硬件支持,一般4系列有4个通道可以用于精准输出,部分型号有8个,不同型号支持的通道数可以咨询正运动厂家。
Basic演示:
BASE(0,1) '依次例如点胶XY轴 UNITS = 1000000,1000000 SPEED = 100,100 ACCEL = 1000,1000 DECEL = 1000,1000 MPOS = 0,0 DPOS = 0,0 MERGE = 1 OP(0,OFF)AXIS_ZSET = 19 '主轴设置精准输出模式 'XY走轨迹 MOVEABS(100,100) '关胶点100,100 MOVE_OP(0,ON) MOVEABS(300,400) '关胶点300,400 MOVE_OP(0,OFF)
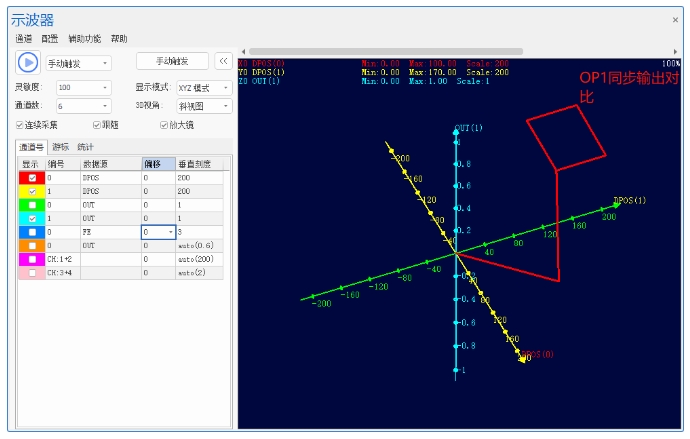
(3)使用MOVEOP_ADIST设置提前/滞后一定距离开关胶
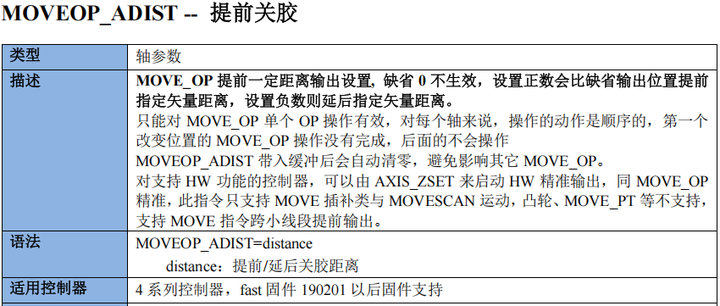
通过设置矢量距离来控制提前滞后开关胶,设置正数会比缺省输出位置(MOVE_OP上一条运动指令的目标位置)提前指定矢量距离,设置负数则延后指定矢量距离。可以由AXIS_ZSET来启动精准输出,同MOVE_OP精准,比较反馈位置。
Basic效果演示:
BASE(0,1) '依次例如点胶XY轴 UNITS = 1000000,1000000 SPEED = 100,100 ACCEL = 1000,1000 DECEL = 1000,1000 MPOS = 0,0 DPOS = 0,0 MERGE = 1 OP(0,OFF) TRIGGER MOVEABS(100,100) '开胶点100,100 'XY走轨迹 MOVEOP_ADIST = -50 '滞后50mm打开 MOVE_OP(0,ON) MOVEOP_ADIST = 0 MOVE_OP(1,ON) MOVE(0,70) MOVE(-100,0) MOVE(0,-70) MOVE(50,0) MOVEABS(100,100) '关胶点 MOVEOP_ADIST = 50 '提前50mm关闭 MOVE_OP(0,OFF) MOVEOP_ADIST = 0 MOVE_OP(1,OFF) MOVEABS(0,0)
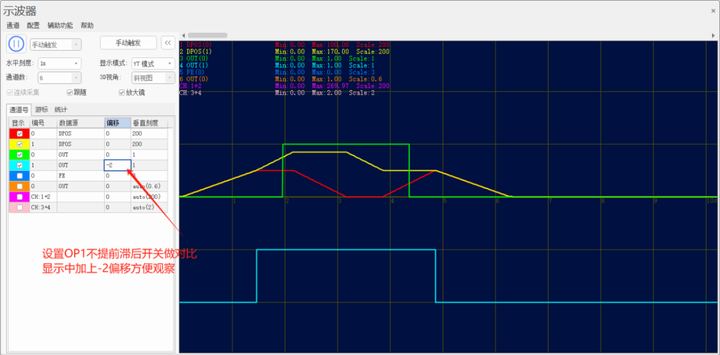
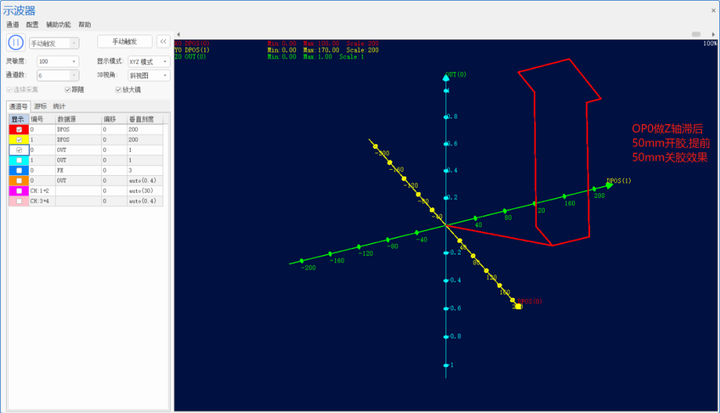
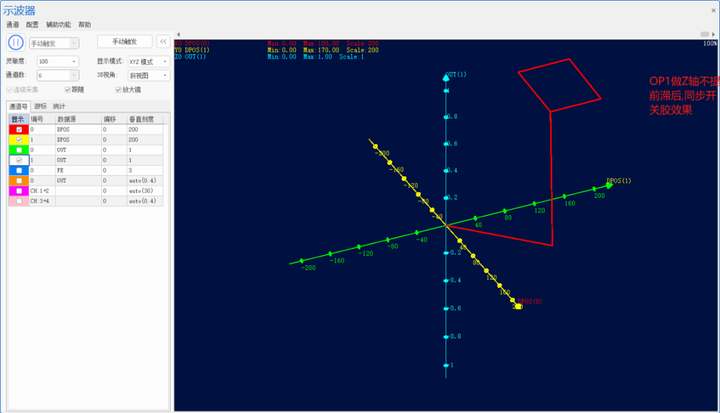
设置OP1开关不做提前延后设置与OP0进行对比,可以看到OP0根据程序设置滞后50mm打开,提前50mm关闭了。
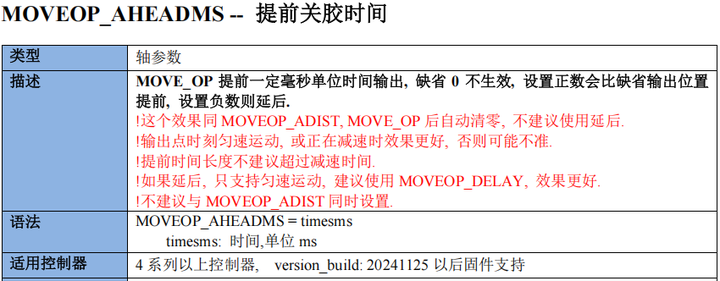
(4)使用MOVEOP_AHEADMS设置提前开关胶时间和MOVEOP_DELAY设置延后开关胶时间
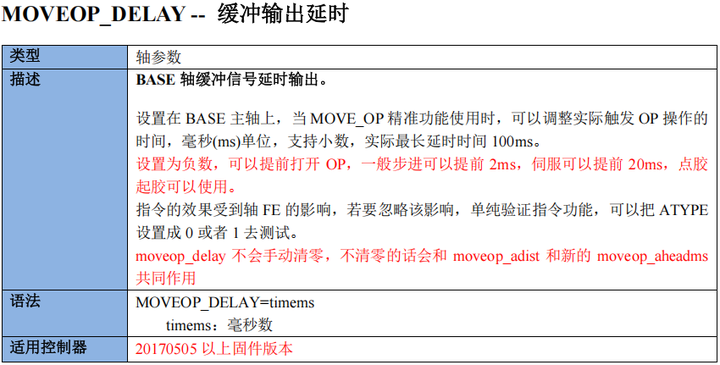
注意MOVEOP_DELAY指令的效果受到轴FE的影响,若要忽略该影响,单纯验证指令功能,可以把ATYPE设置成0或者1去测试。
Basic效果演示:
BASE(0,1) '依次例如点胶XY轴 UNITS = 1000000,1000000 SPEED = 100,100 ACCEL = 1000,1000 DECEL = 1000,1000 MPOS = 0,0 DPOS = 0,0 MERGE = 1 AXIS_ZSET = 19 '主轴设置精准输出模式 OP(0,OFF) TRIGGER MOVEABS(100,100) '开胶点100,100 'XY走轨迹 MOVEOP_DELAY = 100 '滞后50ms打开 MOVEOP_AHEADMS = 0 MOVE_OP(0,ON) MOVEOP_DELAY = 0 MOVEOP_AHEADMS = 0 MOVE_OP(1,ON) 'OP1对比 MOVE(0,70) MOVE(-100,0) MOVE(0,-70) MOVE(50,0) MOVEABS(100,100) '关胶点 MOVEOP_DELAY = 0 MOVEOP_AHEADMS = 100 '提前50ms打开 MOVE_OP(0,OFF) MOVEOP_DELAY = 0 MOVEOP_AHEADMS = 0 MOVE_OP(1,OFF) 'OP1对比 MOVEABS(0,0)
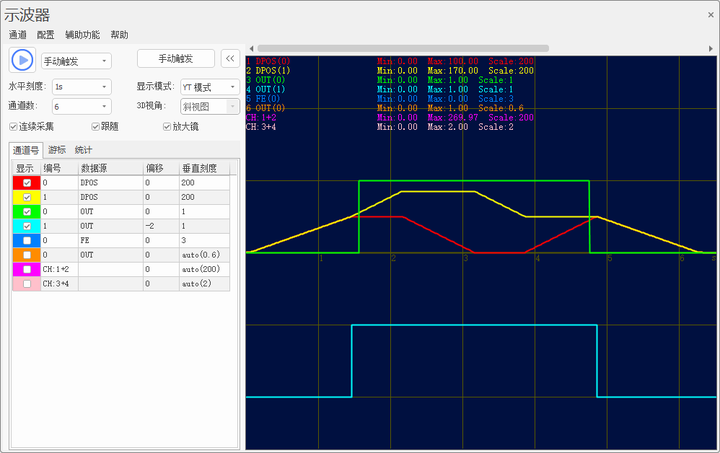
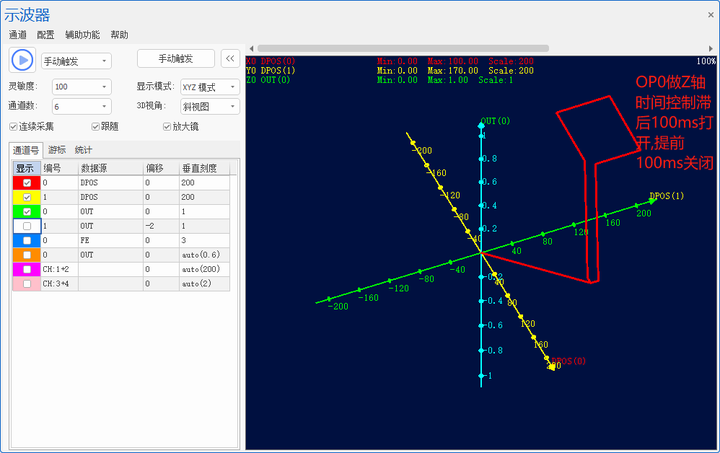
同样设置OP1开关不做提前延后设置与OP0进行对比,可以看到OP0根据程序设置滞后100ms打开,提前100ms关闭了。
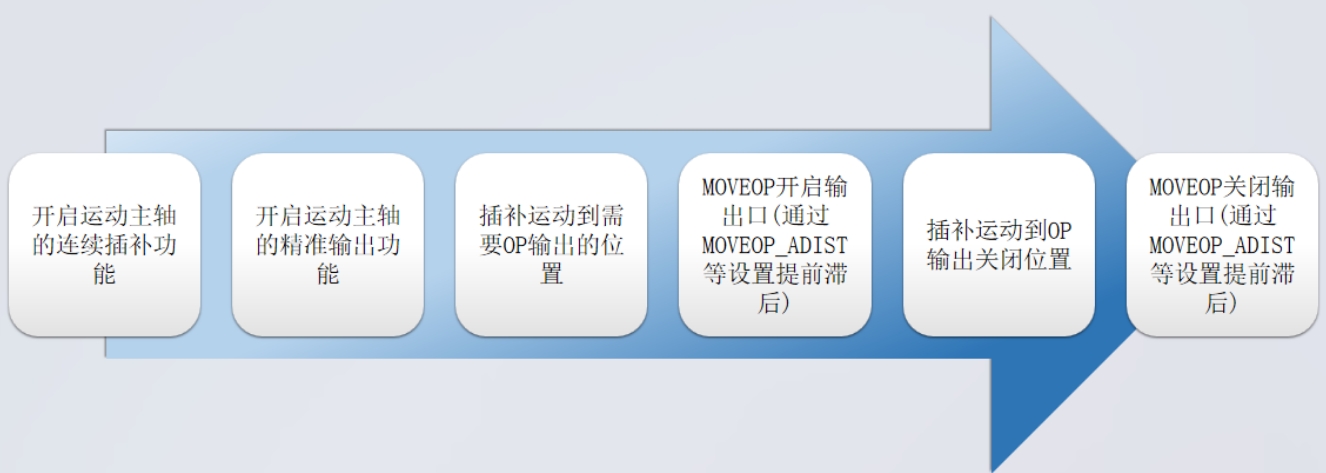
3.流程总结
四.C#编程进行运动控制项目开发
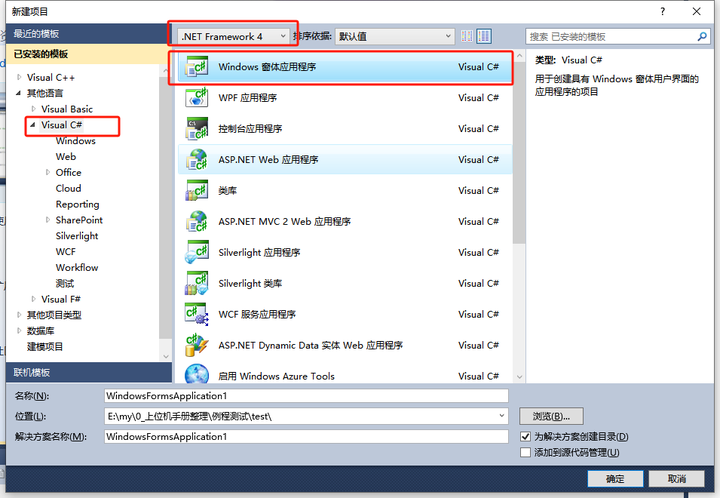
1.在VS2010菜单“文件”→“新建”→“项目”,启动创建项目向导。
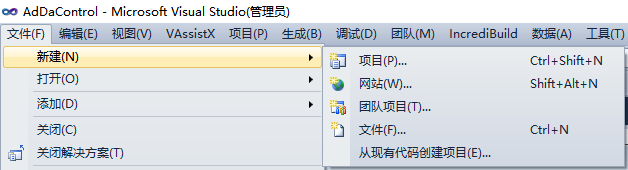
2.选择开发语言为“Visual C#”和.NET Framework 4以及Windows窗体应用程序。
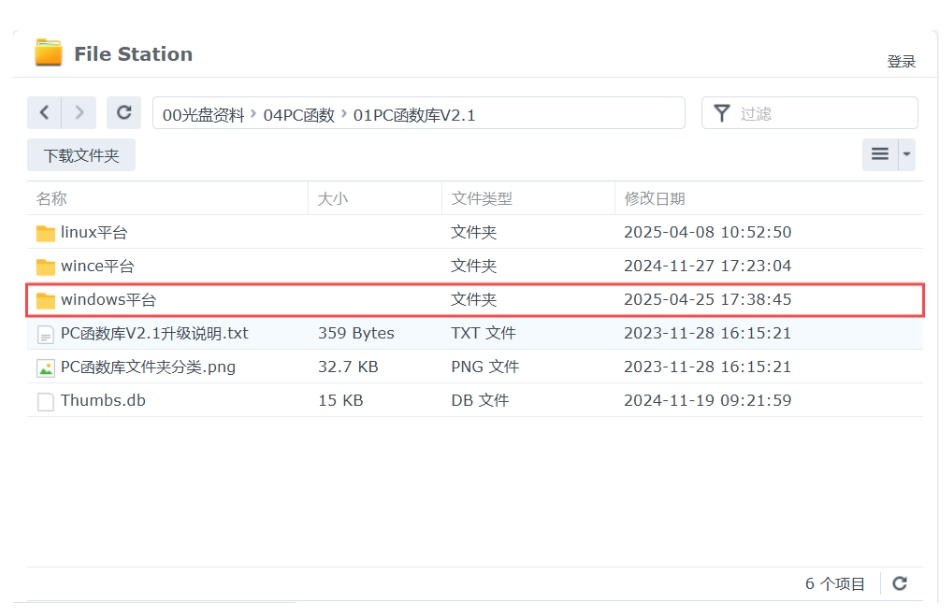
3.找到厂家提供的光盘资料里面的C#函数库,路径如下(32位库为例)。
(1)进入厂商提供的光盘资料找到“04PC函数”文件夹,并点击进入。

(2)选择“01PC函数库2.1”文件夹。

(3)选择“Windows平台”文件夹。
(4)选择“C#”文件夹。
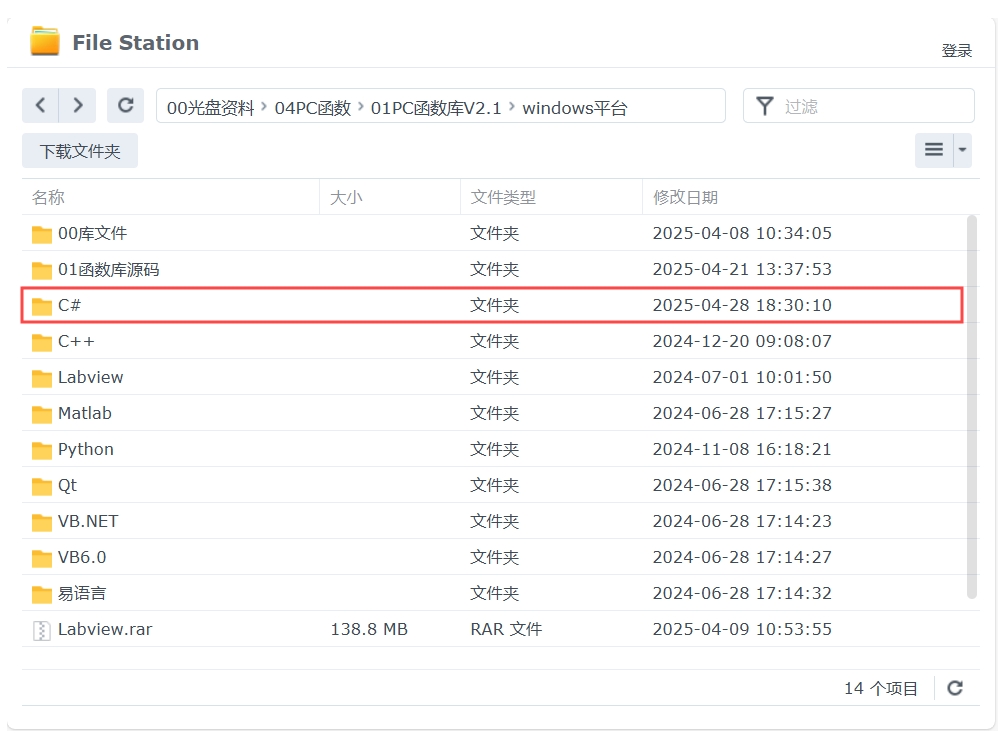
(5)根据需要选择对应的函数库,这里选择32位库。

4.将厂商提供的C#的库文件以及相关文件复制到新建的项目中。
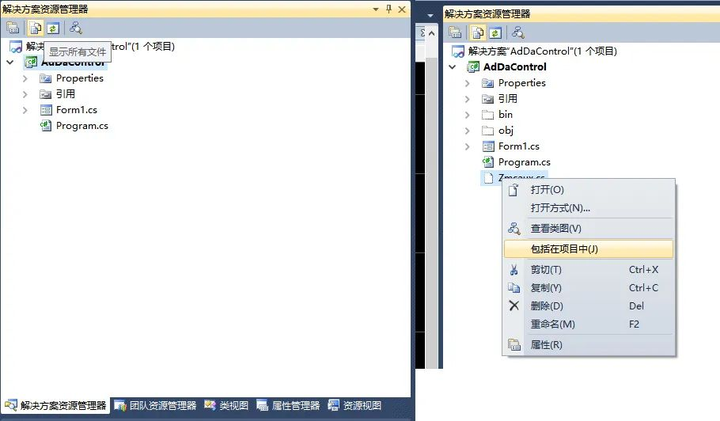
(1)将zmcaux.cs文件复制到新建的项目里面中。
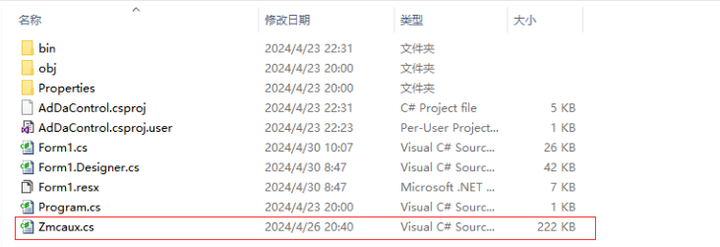
(2)将zauxdll.dll和zmotion.dll文件放入bindebug文件夹中。
5.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入using cszmcaux,并声明控制器句柄g_handle。
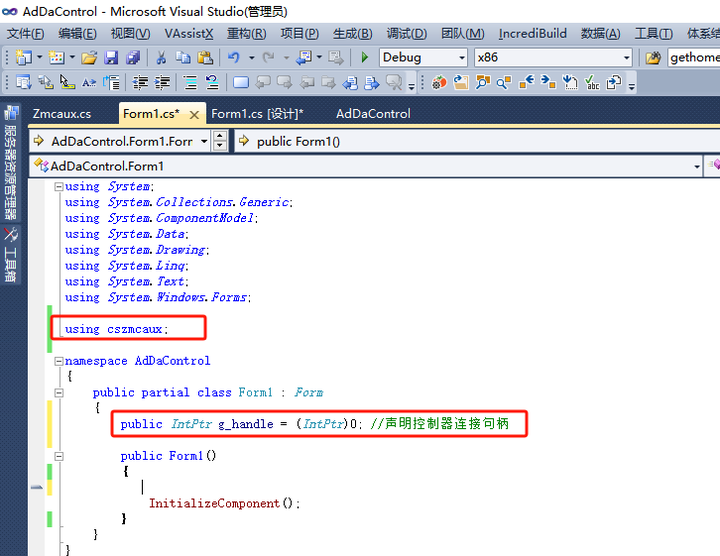
6.至此,项目新建完成,可进行C#项目开发。
五.相关PC函数
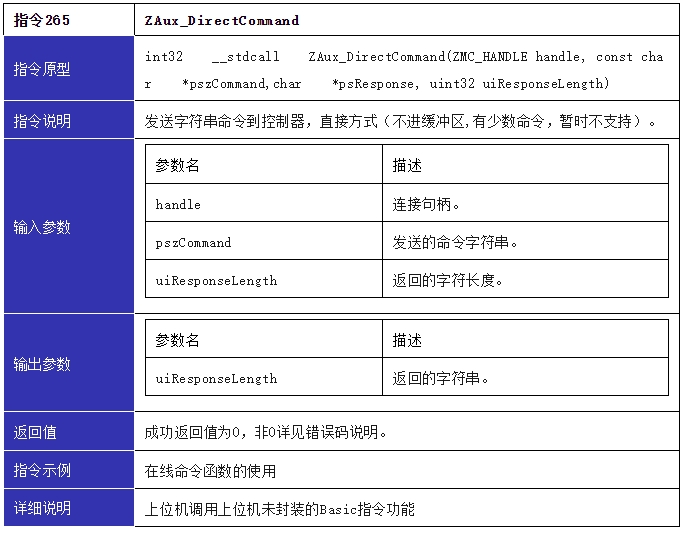
由于函数库未封装对应MOVEOP_ADIST / MOVEOP_AHEADMS / MOVEOP_DELAY的函数,所以需要用ZAux_DirectCommand来发送对应Basic指令。
C#主体代码:
privatevoidauto_move()
{
ThreadFlag =true;
zmcaux.ZAux_Direct_SetSpeed(g_handle,0, Convert.ToSingle(C_AutoSpeed.Text));
zmcaux.ZAux_Direct_SetAccel(g_handle,0, Convert.ToSingle(C_AutoAccel.Text));
zmcaux.ZAux_Direct_SetDecel(g_handle,0, Convert.ToSingle(C_AutoDecel.Text));
stringcmdbuff ="AXIS_ZSET(0) = 19 ";
UInt32 uiResponseLength =2048;
StringBuilder psResponse =newStringBuilder((Int32)uiResponseLength);
Int32 iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength); //设置主轴开启精准输出模式
zmcaux.ZAux_Direct_MoveAbs(g_handle,2,newint[] {0,1},newfloat[] {0,0});//走到零位
while(true)
{
if(checkFrameAxisIdleState() ==true)break;
}
zmcaux.ZAux_Trigger(g_handle);
//相对运动走轨迹
zmcaux.ZAux_Direct_Move(g_handle,2,newint[] {0,1},newfloat[] {0,-35}); //走到开胶点
cmdbuff ="MOVEOP_DELAY = 0";
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
if(!ifTimeControl) //距离控制
{
cmdbuff ="MOVEOP_ADIST = "+ C_OpenDis.Text;
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
}
else
{
if(Convert.ToSingle(C_OpenTime.Text) >0) //提前
{
cmdbuff ="MOVEOP_AHEADMS = "+ C_OpenTime.Text;
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
}
else //滞后
{
stringT_Value = (-Convert.ToSingle(C_OpenTime.Text)).ToString(); //moveop_delay滞后需要正值
cmdbuff ="MOVEOP_DELAY = "+ T_Value;
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
}
}
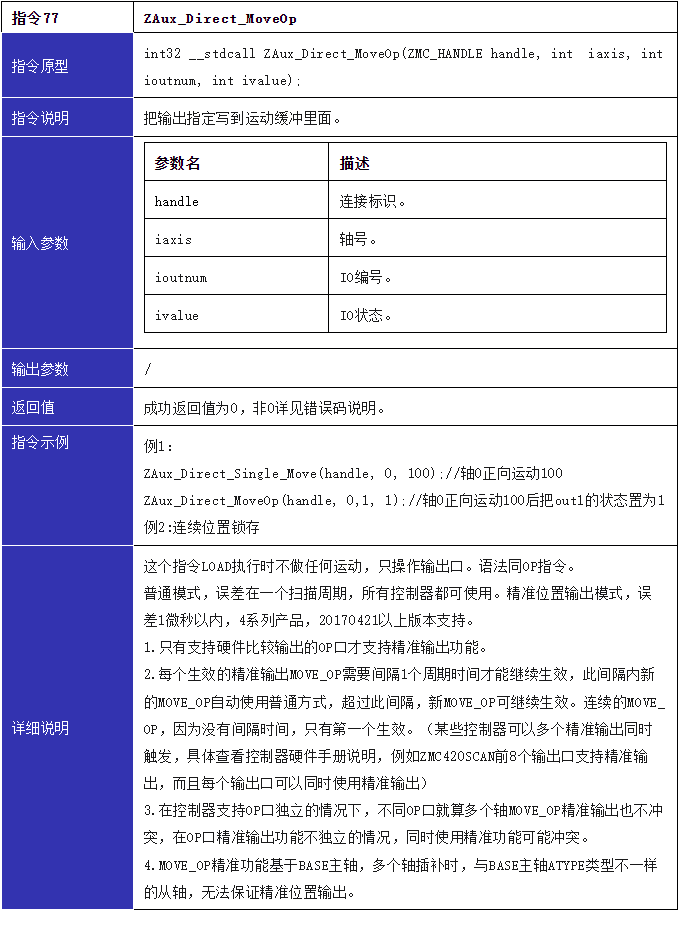
zmcaux.ZAux_Direct_MoveOp(g_handle,0,0,1);
//测试走点胶轨迹
zmcaux.ZAux_Direct_Move(g_handle,2,newint[] {0,1},newfloat[] {50,0});
//iresult = zmcaux.ZAux_Direct_MSpherical(g_handle, virAxisList.Length, virAxisList, 0, 100, 0, 50, 50, 0, mSphericalMode, 5, 90);
zmcaux.ZAux_Direct_Move(g_handle,2,newint[] {0,1},newfloat[] {0,70});
//iresult = zmcaux.ZAux_Direct_MSpherical(g_handle, virAxisList.Length, virAxisList, 0, -100, 0, -50, -50, 0, mSphericalMode, 5, 90);
zmcaux.ZAux_Direct_Move(g_handle,2,newint[] {0,1},newfloat[] {-100,0});
zmcaux.ZAux_Direct_Move(g_handle,2,newint[] {0,1},newfloat[] {0,-70});
zmcaux.ZAux_Direct_Move(g_handle,2,newint[] {0,1},newfloat[] {50,0}); //走到关胶点
//zmcaux.ZAux_Direct_Move(g_handle, 2, new int[] { 0, 1 }, new float[] { 0, 35 }); //走到关胶点
cmdbuff ="MOVEOP_DELAY = 0";
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
if(!ifTimeControl) //距离控制
{
cmdbuff ="MOVEOP_ADIST = "+ C_CloseDis.Text;
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
}
else
{
if(Convert.ToSingle(C_CloseTime.Text) >0) //提前
{
cmdbuff ="MOVEOP_AHEADMS = "+ C_CloseTime.Text;
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
}
else //滞后
{
stringT_Value = (-Convert.ToSingle(C_CloseTime.Text)).ToString(); //moveop_delay滞后需要正值
cmdbuff ="MOVEOP_DELAY = "+ T_Value;
iresult = zmcaux.ZAux_DirectCommand(g_handle, cmdbuff, psResponse, uiResponseLength);
}
}
zmcaux.ZAux_Direct_MoveOp(g_handle,0,0,0);
zmcaux.ZAux_Direct_MoveAbs(g_handle,2,newint[] {0,1},newfloat[] {0,0}); //走到零位
}
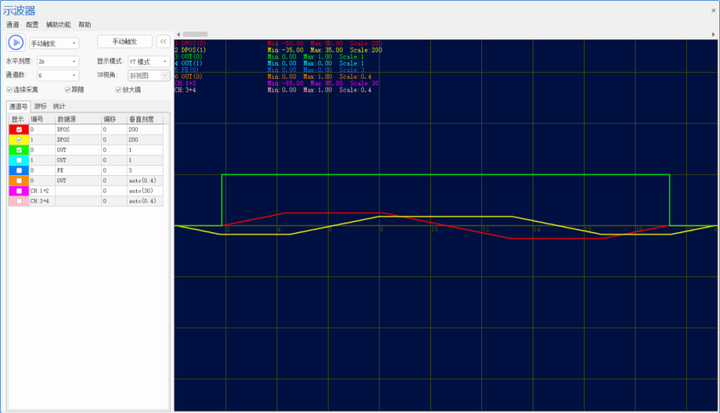
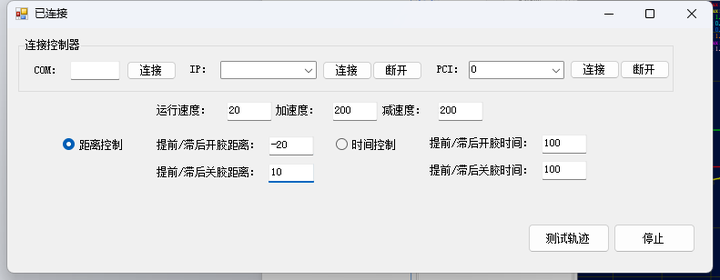
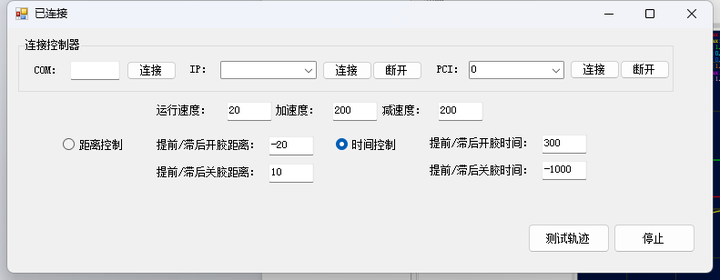
六.效果演示
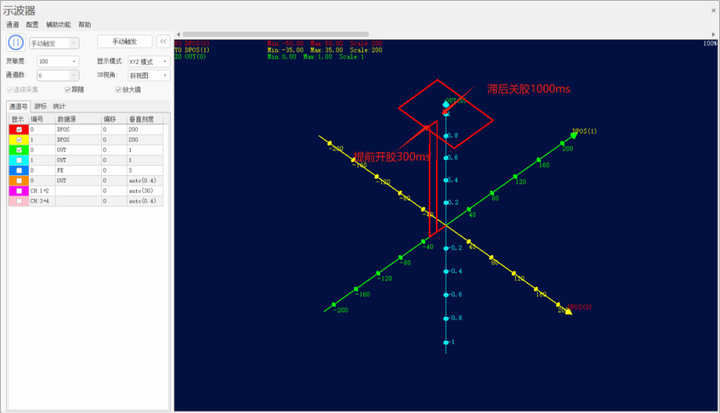
下面以C#代码跑测试和RTSys示波器抓取波形分析。
1.同步输出效果:
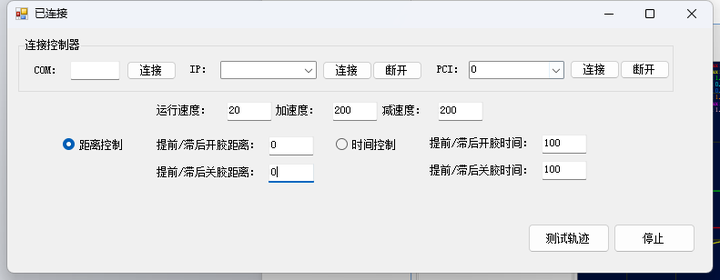
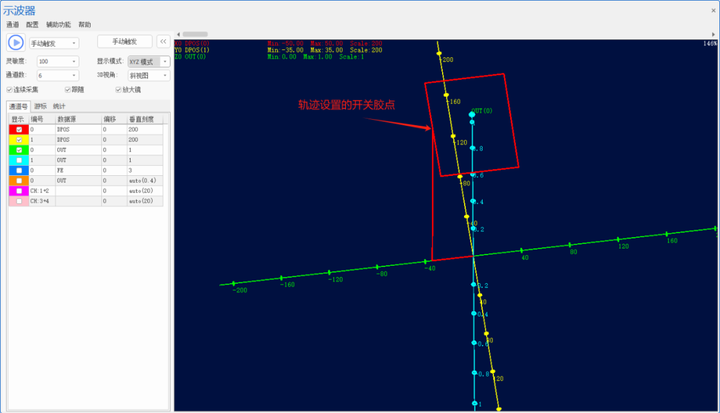
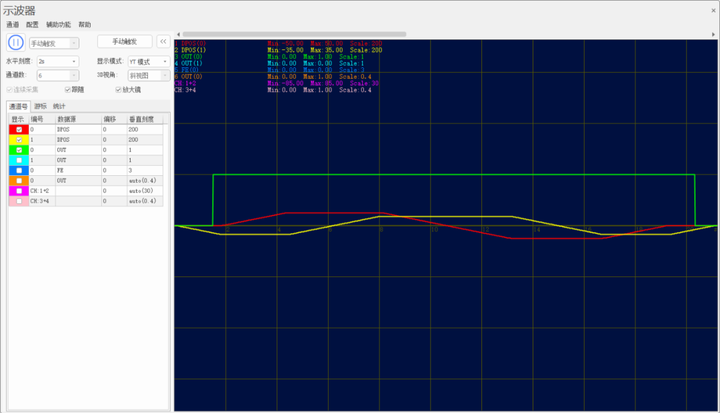
2.距离控制提前滞后输出效果:
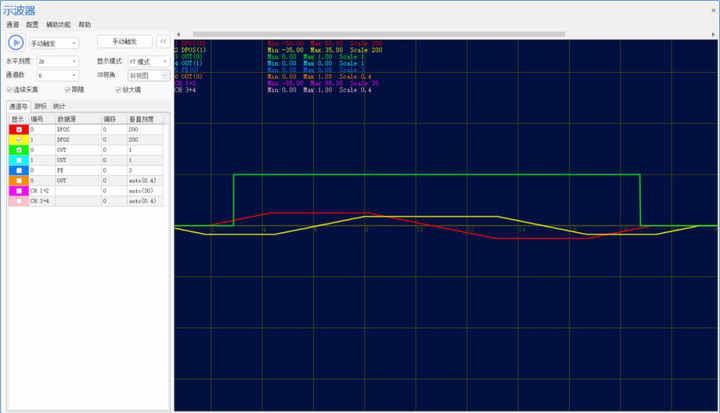
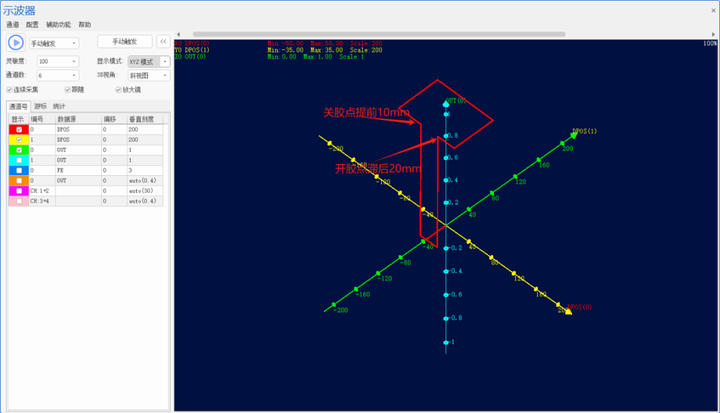
3.时间控制提前滞后效果:
视频讲解可点击→“PCIe EtherCAT实时运动控制卡PCIE464点胶工艺中的同步提前延时开关胶”查看。
完整代码获取地址
▼

本次,正运动技术PCIe EtherCAT实时运动控制卡PCIE464点胶工艺中的同步/提前/延时开关胶,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
PCIe
+关注
关注
16文章
1508浏览量
89227 -
运动控制
+关注
关注
5文章
845浏览量
34742 -
ethercat
+关注
关注
20文章
1635浏览量
46406 -
正运动技术
+关注
关注
0文章
142浏览量
925
发布评论请先 登录









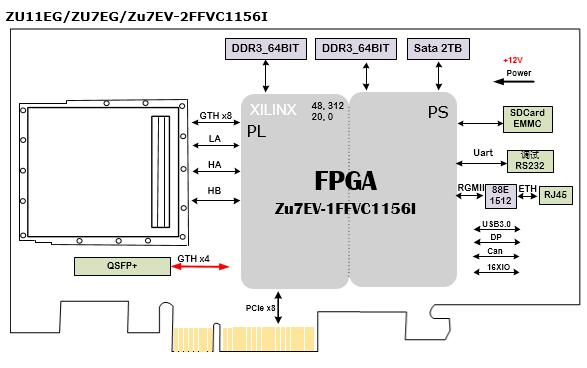
图像信号分析处理卡设计原理图:536-基于FMC接口的XCZU7EV 通用PCIe卡 视觉处理卡 工业控制卡



评论