 CAN XL车载网络验证,看这篇就够了!
CAN XL车载网络验证,看这篇就够了!

摘要
CAN XL满足了现代汽车系统日益增长的带宽需求。由于现有的CAN协议易于适配和重复使用(CAN协议可能是汽车中应用最广泛的网络协议),其灵活的数据速率和更大的有效载荷为不断增长的信息流提供了良好的解决方案。然而,该协议本身给设计者带来了一些挑战。系统的动态行为无法通过手动计算预测,这就迫使设计者使用仿真或测量手段来分析网络,以实现稳健设计,并研究随着CAN协议发展而变化的关键影响因素。在高速CAN网络中,传播延迟曾是限制因素,但随着CAN FD和SIC的出现,情况发生了彻底改变。对于CAN XL,必须检查新收发器以及填充规则、SIC与FAST模式切换等协议修改带来的影响。所有这些最终都归结为对物理层进行验证,以改善信号质量,并确保即使在最坏情况下也能实现准确无误的通信。
01# CAN技术的发展
20世纪80年代,控制器局域网(CAN),也就是经典CAN(CAN CC),最初是为工业应用开发的,后来被适配应用于汽车行业。
CAN能够通过非屏蔽双绞线传输高达1Mbit/s的比特率。对于经典基础帧格式(CBFF),其有效载荷大小限制为8字节,标识符为11位。为了实现高达1Mbit/s的比特率,开发了经典扩展帧格式(CEFF),它允许使用29位标识符。标识符用于优先级排序,以区分数据类型和寻址。
由于其多功能性、高可靠性、高数据速率和灵活的网络设计,CAN已成为汽车领域的主要标准,因此在车辆的许多不同领域都有应用。
车辆中可实现的最大电缆长度和网络结构取决于传输速度。在车辆中使用时,需要对网络的传输特性和信号行为进行适当的评估和验证。信号的传播延迟对于CAN网络的研究尤为重要。例如,传播延迟过长可能导致位采样错误,一方面会使正确的仲裁无法进行,另一方面会导致数据传输错误(错误帧)。这样的网络不适合在车辆中使用,必须根据要求进行调整。
灵活数据速率控制器局域网(CAN FD)是CAN CC的进一步发展。使用CAN FD,传输高达8Mbit/s的更高比特率成为可能,其有效载荷也显著增大,最高可达64字节。CAN FD标准采用29位标识符。与CAN CC相比,由于传输速度更高,根据所使用的收发器和传输线,CAN FD的电缆长度可能需要缩短。
更高的传输速率对CAN FD数据阶段相关的采样时间范围带来了进一步限制。网络中的时钟容差和信号不对称性在此起着尤为重要的作用。如果这些参数偏差过大,位长的偏移可能导致位采样错误,从而造成数据传输错误(错误帧)。例如,在发送器(接收器同理)中,隐性到显性和显性到隐性斜率之间的信号不对称性会发生偏移。建议不要将时钟容差设置得过高,否则所有发送和接收网络节点之间可能会出现差异。
此外,振铃等效应可能会在CAN CC和CAN FD网络中出现。这些效应也是由各种网络结构日益复杂导致的,会引起信号传输错误。
为了最大程度地减少这些特殊效应,尤其是振铃,开发了信号改进能力(SIC)方法。使用这些方法可显著改善CAN FD网络的信号行为和鲁棒性。通过使用SIC收发器,这些特殊的网络效应可以大大降低。在CAN高电平和CAN低电平之间,SIC收发器在隐性状态下的阻抗从高阻值变为传输线的特性阻抗。
02# CAN XL新技术
CAN XL是CAN的最新一代技术,它提供高达20Mbit/s的可配置数据比特率和最大2048字节的大有效载荷。借助合适的物理介质附件(PMA)实现和比特率适配,CAN XL不仅具有可扩展性,还具备灵活性,能够构建复杂的车载网络(IVN),如带有长支线的星形和线性总线。
CAN XL保持了CAN CC和CAN FD的可靠性。它仍然采用载波监听多路访问/冲突解决(CSMA/CR)的总线访问方法,从而确保更重要的消息能够传输。对于有效载荷较大的CAN XL帧,新的分片功能有助于减少车载网络中的延迟。

然而,与使用29位标识符的CAN FD协议不同,CAN XL仅支持11位标识符,其中包含帧的优先级ID。有关寻址和数据类型的信息现在位于数据字段中,不再是标识符的一部分,这带来了更快、更高效的数据速率。CAN XL中另一项改进的功能是循环冗余校验(CRC)。CAN CC中的CRC为15位,CAN FD中为17位或21位。而CAN XL的数据阶段有两个CRC字段:13位的前置CRC(PCRC)和32位的帧CRC(FCRC),这使得传输的汉明距离达到6,保证了传输的可靠性。
CAN XL不仅改进了现有功能还引入了新功能,包括:
■ 优先级(仲裁字段中)和寻址功能(现在位于控制字段中)分离:这使得在同一总线上运行多个高层协议/应用程序成为可能。
■ 支持虚拟CAN网络ID(VCID):这简化了帧过滤,增强了安全性。
凭借这些显著的增强功能和新特性,CAN XL可用于面向服务的通信(如以太网隧道)以及基于信号的通信(更快的CAN FD)。这使得CAN XL不仅非常适合在现有电子电气架构的基础上进一步发展,也能满足未来区域化车载网络架构的要求。
上述所有特性改进了CAN XL的技术和应用,但这并不影响车载网络的验证工作。对设计者工作产生影响的第一个变化是位填充。CAN XL中使用两种类型的填充位:动态填充位(仲裁阶段)和固定填充位(数据阶段)。
在仲裁阶段,每连续5位后会添加一个互补的动态填充位。在数据阶段,从DL1位开始(包括DL1位)到FCRC字段结束,每10位插入一个固定填充位,如图1所示。因此,连续位的最大数量为11位,现有的最坏情况模式必须进行调整。
CAN XL中的仲裁行为与CAN CC和CAN FD中的仲裁行为类似,因此,仲裁阶段使用的验证标准仍然适用于CAN XL,包括:
■ 考虑仲裁阶段位定时设置的时钟容差。
■ 仲裁场景以及对确认位的正确采样,重点关注不同节点之间显性到隐性边沿和隐性到显性边沿的传播延迟。
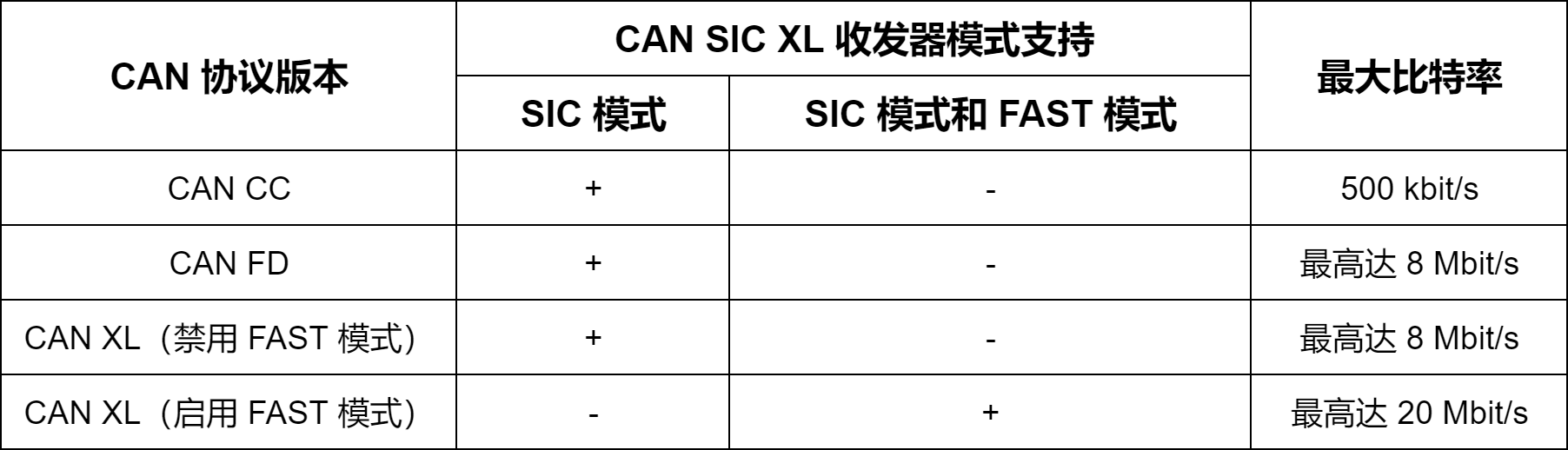
在网络验证方面,最大的变化之一是新的操作模式。CAN XL有两种操作模式:
模式切换关闭/错误信号开启
由于模式切换是软件可配置的,当模式切换关闭时,CAN SIC XL PMA的实现方式类似于常规的CAN FD SIC(有效载荷可能更大)。在这种情况下,必须启用错误信号。在这种场景下,CAN XL与CAN CC和CAN FD兼容。此操作模式适用于数据阶段比特率高达8Mbit/s的情况。
CAN XL模式对于判断信号边沿的不对称性至关重要。当收发器处于SIC模式时,数据阶段的验证过程与CAN FD采用相同的标准,包括:
■ 考虑数据阶段位定时设置的时钟容差,以确保正确通信。
■ 关注信号定时要求的场景。隐性位和显性位的信号对称性对于确保每位的安全采样尤为重要,并且随着比特率的增加,其重要性也会提高。
■ 在每个节点测量差分信号的模拟振铃。
有关CAN FD网络仿真验证标准的更多详细信息,请参见参考文献[1]。
由于CAN XL数据阶段填充率的变化,使用的最坏情况模式需要相应调整。为了验证车载网络,一种由连续位组成的最坏情况模式被用作CAN总线上每个发送节点的激励模式。根据测试用例的不同,该模式可能会有所不同。例如:
■ 通过评估模拟振铃(即所谓的稳定时间标准):将最长的无需重新同步的位序列用作最坏情况模式。在这种情况下,该模式由11个显性位后跟几个隐性位组成。
■ 对于信号对称性测试用例:所使用的模式类似于网络中电容充电和放电的最坏情况。这种最坏情况模式由11个显性位后跟1个隐性位组成。因为这一位的信号定时要求在最新的ISO 11898标准中有明确规定。
模式切换开启/错误信号关闭
对于高达20Mbit/s的比特率,需要使用CAN SIC XL实现。这些设备在仲裁阶段需要非归零(NRZ)编码,在数据阶段需要脉冲宽度调制(PWM)编码。
在此模式下,仲裁阶段使用SIC模式,数据阶段使用具有推挽(0电平/1电平)驱动器的FAST模式。CAN XL协议控制器在仲裁数据序列(ADS)和数据仲裁序列(DAS)字段期间发出模式切换信号。为了使接收节点能够读取0电平/1电平信号,接收器需要切换到FAST RX模式并相应调整阈值。为了切换接收器模式,接收节点在其TxD引脚发送1电平信号,以在整个数据阶段通知模式更改。PMA在CAN XL帧的仲裁到数据高位(ADH)和数据到仲裁高位(DAH)期间进行模式切换。
ADS字段由四位组成,即ADH、DH1、DH2和DL1,如下图1所示。ADH位是具有标称位时间的最后一位,通过稳定时间进行评估,以确保对后续的DH1位(即CAN XL数据字段中的第一位)进行正确采样。由于协议控制器会忽略ADH位,因此这种切换场景对于整个网络验证的影响较小。不过,在包含许多反射的大型网络中,仍需要对此进行检查。
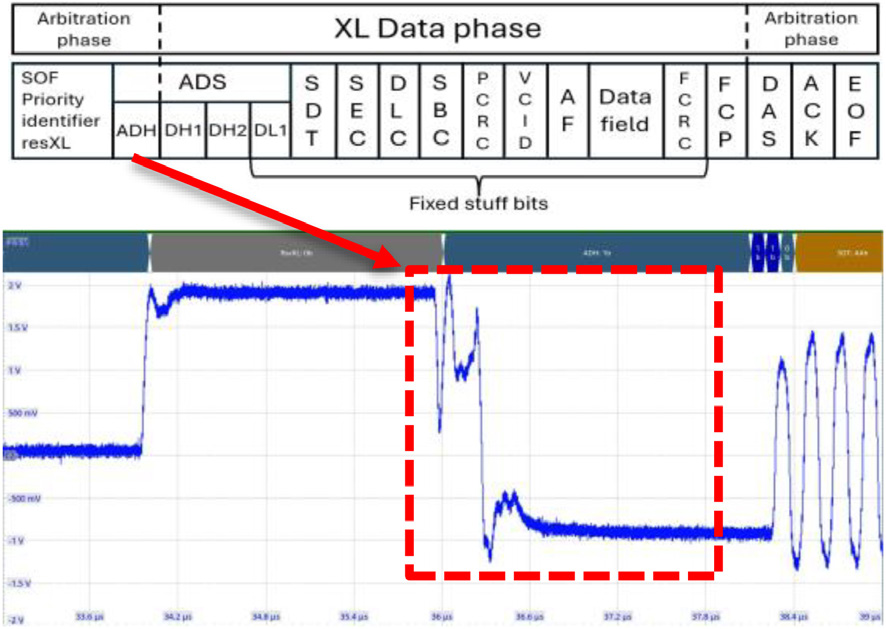 图1:仲裁到数据阶段的模式切换
图1:仲裁到数据阶段的模式切换需要注意的是,在这种模式下,错误信号是禁用的。因此,无需对接收自身消息的情况进行验证。
在FAST模式下,输出信号是0电平和1电平的对称交替差分信号,这两个电平均由发送器控制。此外,根据参考文献[2],FAST模式下接收器的阈值为±100mV,两个电平相对于接收器阈值是对称的。因此,与之前所有的实现方式相比,发送器和接收器中的信号不对称性现在都显著减小。
随着在FAST模式下实现高达20Mbit/s的更高数据比特率,眼图分析对于验证和评估CAN XL网络的数据阶段至关重要。稳定时间仅考虑位的缩短情况,而眼图则考虑了FAST模式下所有位的缩短、延长以及转换和总线电平。
03# 眼图和采样点的功能描述
眼图(Eye diagram)通常用于在幅度/时间域图中,将传输的比特流的各种信号转换显示为信号时钟的函数。对于CAN XL,FAST模式下的各个信号转换会叠加形成一个 「眼图」。通过这种可视化形式,可以显示并轻松评估各种影响因素,如抖动、噪声、偏移、振铃和其他网络效应,以检查信号完整性。此外,还可以利用上升/下降时间和符号持续时间。
评估这些影响因素的一个基本标准是一个多边形,也称为眼图模板。多边形的形状主要是根据最新的ISO-11898标准选择的参数来确定的。用于定义眼图模板区域的参数如下:
√ 比特率
√ 温度(低温/室温/高温)
√ 上下电压电平(阈值)
√ 上升/下降时间(20%-80%)
√ 位宽变化(发送/接收)
√ 通信控制器
√ 时钟容差(振荡器/锁相环 - PLL)
在评估时,将此眼图模板放置在眼图开口处。然后使用采样点确定眼图模板在眼图开口中的最终位置。
眼图模板在眼图中的位置,以及选定的影响因素与信号曲线的对应关系,如下图2所示。
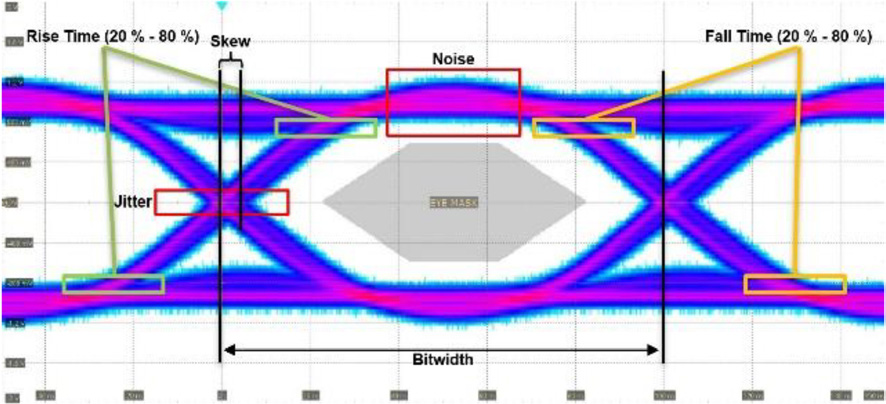 图2:眼图-嵌入眼图模板并标注影响因素
图2:眼图-嵌入眼图模板并标注影响因素以下因素对采样点位置的选择非常重要:
■ 时钟容差
■ 控制器影响
■PMA影响
■ 网络效应
这些因素会导致位长缩短或延长,如下图3所示。因此,FAST模式的采样点应位于位长的大约50%至80%之间。当采样点的位置发生偏移时,眼图模板的位置也必须相应调整。
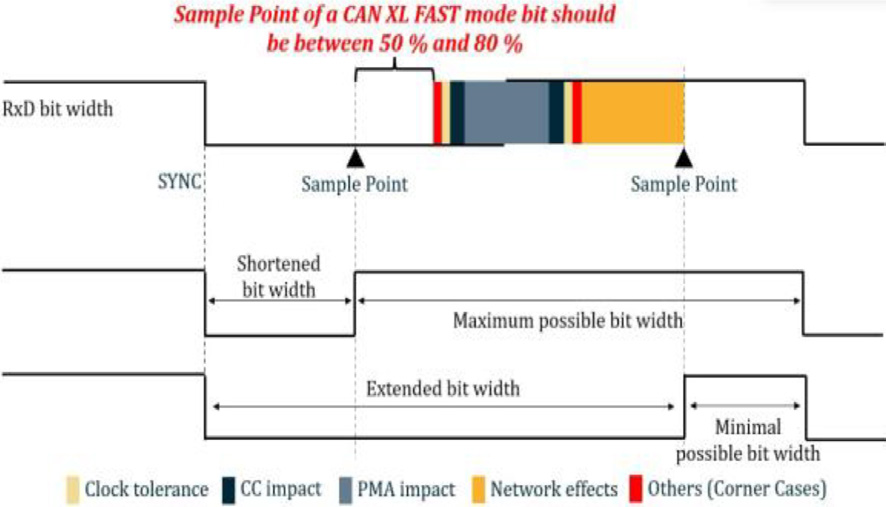 图3:各因素对采样点位置的影响
图3:各因素对采样点位置的影响如果信号序列位于此眼图模板内,则信号完整性受到损害,传输的比特流中可能会出现位错误。在这种情况下,眼图模板被违反,必须判定为 「失败」。如果眼图模板未被违反,则判定为 「通过」。
此处描述的过程将在下面的章节中,在最坏情况下通过示例网络进行软件验证评估。它展示了如何使用上述眼图和眼图模板进行验证,以及是否需要考虑任何额外的条件和参数。
04# 示例网络描述和验证的一般条件
该网络由九个节点组成,总电缆长度为24.85米。距离最远的两个节点相距14米,并且每个节点都端接一个100Ω的电阻。CAN XL通信通过特殊的评估板进行。
网络中使用了以下电气元件:
■ CAN XL通信控制器(CAN XL IP)
■ CAN SIC XL收发器
■PMA影响
■ 网络效应
所选的收发器和控制器符合最新的ISO 11898标准要求。使用的CMC和UTP也满足CAN XL网络通信的要求。
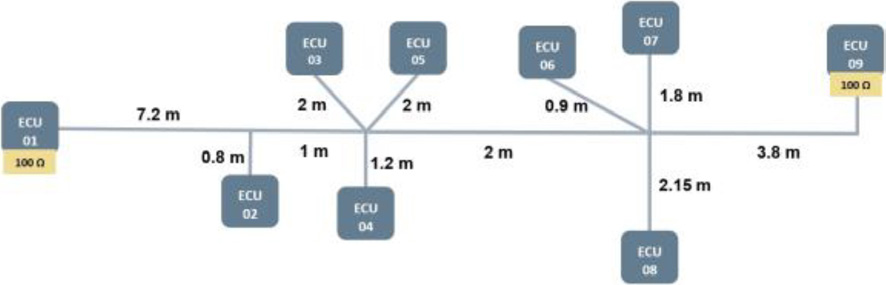 图4:用于仿真和测量的示例网络
图4:用于仿真和测量的示例网络为验证选择了以下特殊的框架条件:
■ 对于示例网络中FAST模式下的传输:选择了一种最坏情况模式,该模式由比特流信号转换的所有可能组合组成。
■为了产生尽可能强的振铃:选择的网络结构使网络节点的不同长度尽可能多地相互成倍数关系。
■ 使用10Mbit/s和12.3Mbit/s的比特率。选择的比特率越高,结合采样点在眼图开口中定位眼图模板的变化就越少。
仿真结果的验证是通过定义的测试设置和上述特殊框架条件进行的。
05# 评估标准
通常,作为网络验证的一部分,需要测试每一种可能的网络发送器和接收器组合。对前面描述的示例网络进行了此项测试。不过,为突出两个选定的节点,此处并未提及所有组合。根据定义的评估标准,未在此列出的节点在12.3Mbit/s和10Mbit/s速率下均通过了测试。考虑到上述框架条件,使用软件仿真对物理层进行验证得到以下结果。
在10Mbit/s的比特率下,网络通过了仿真测试。在12.3Mbit/s的比特率下,网络未通过仿真测试。还需要注意的是,验证是在室温下进行的。
作为结果的额外保障,使用了评估板可用的配置软件来检查协议IP内的错误情况。该软件可用于确定发送的信号是否能够被接收和解码。
可以得出结论,通过仿真获得的眼图与通过测量记录的眼图几乎相同,这适用于两种比特率。
12.3Mbit/s的验证
在仿真和测量结果的图5和图6中,可以观察到基于选定的采样点,眼图模板被违反。将采样点向右移动1个最小时间量子(MTQ),眼图模板也随之移动,这只会减少违反的程度,但眼图模板仍会被违反,而且现在是两侧都被违反!
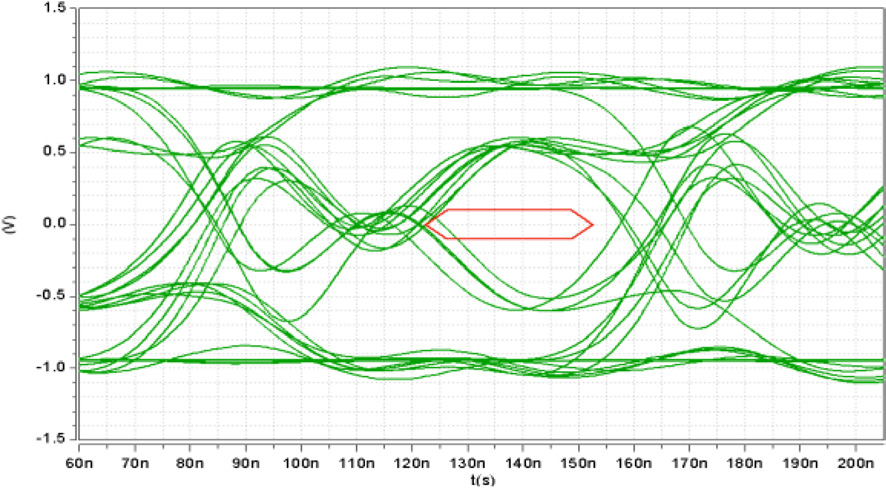 图5:12.3Mbit/s FAST模式仿真眼图
图5:12.3Mbit/s FAST模式仿真眼图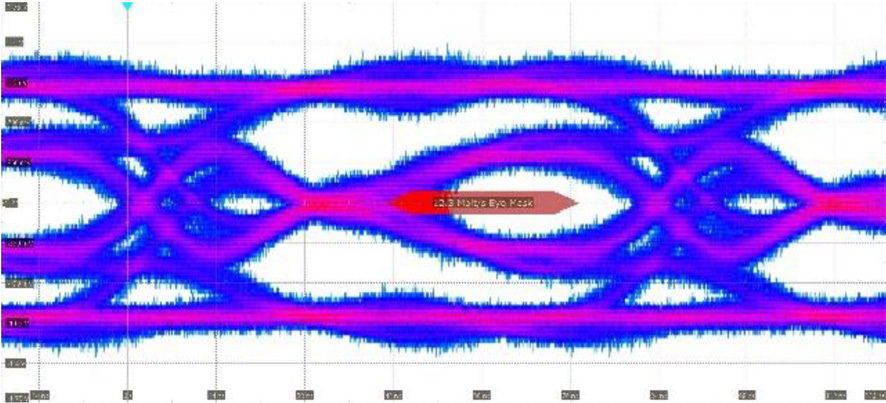 图6:12.3Mbit/s FAST模式测量眼图
图6:12.3Mbit/s FAST模式测量眼图通过评估板的软件确认,两个选定节点之间的传输存在故障,如图7所示。因此,该网络未通过验证。
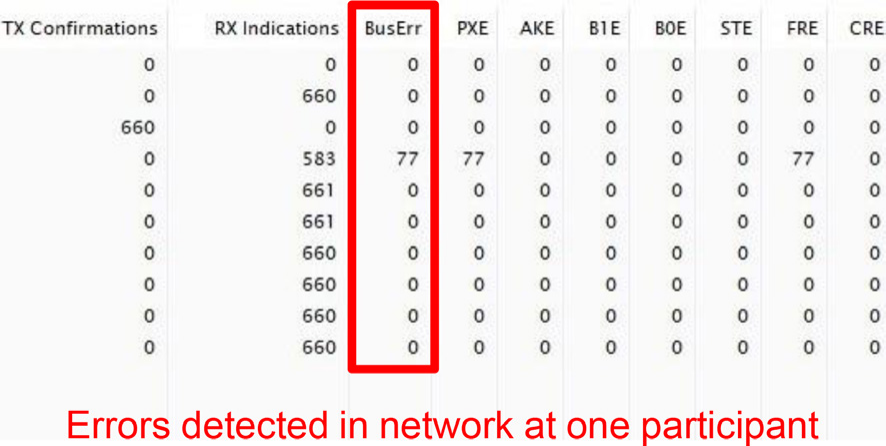 图7:12.3Mbit/s评估板软件结果
图7:12.3Mbit/s评估板软件结果10Mbit/s的验证
在10Mbit/s的比特率下,根据选定的采样点,仿真(图8)和测量(图9)的眼图模板均未受损。在指定范围内将采样点向左或向右移动1个MTQ,不会导致眼图模板被违反。评估板的软件确认选定节点之间的传输无错误(图10)。
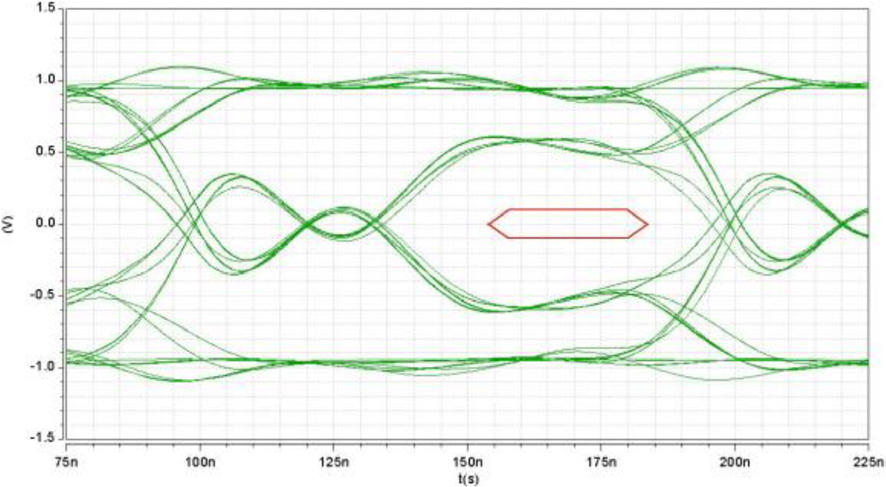 图8:10Mbit/s FAST模式仿真眼图
图8:10Mbit/s FAST模式仿真眼图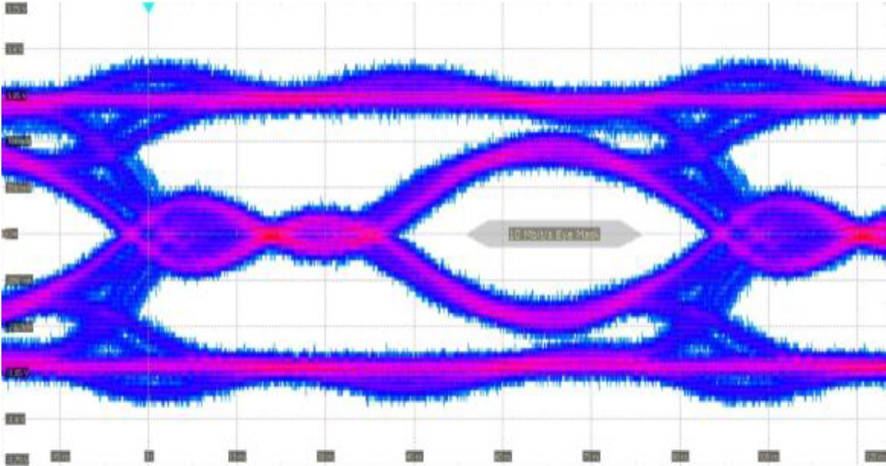 图9:10Mbit/s FAST模式测量眼图
图9:10Mbit/s FAST模式测量眼图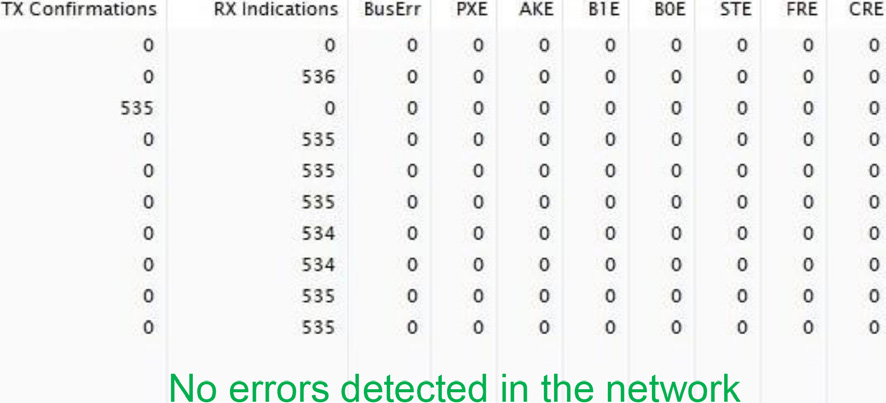 图10:10Mbit/s评估板软件结果
图10:10Mbit/s评估板软件结果与12.3Mbit/s的比特率相比,10Mbit/s的比特长度增加了18.75ns,这使得振铃现象不那么明显,意味着眼图开口在高度和宽度上都更大。与12.3Mbit/s相比,偏移也显著减小。
尽管将比特率降低到10Mbit/s后,网络的信号表现有所改善,但评估不能仅考虑室温条件。下图11展示了在单个眼图中,通过仿真得到的高温、室温和低温下的信号表现。可以明显看出,眼图模板未被违反,因此,该网络在三种温度下均通过了验证。不过,像生产过程中的差异等因素,即使在10Mbit/s的速率下也可能导致测试失败。
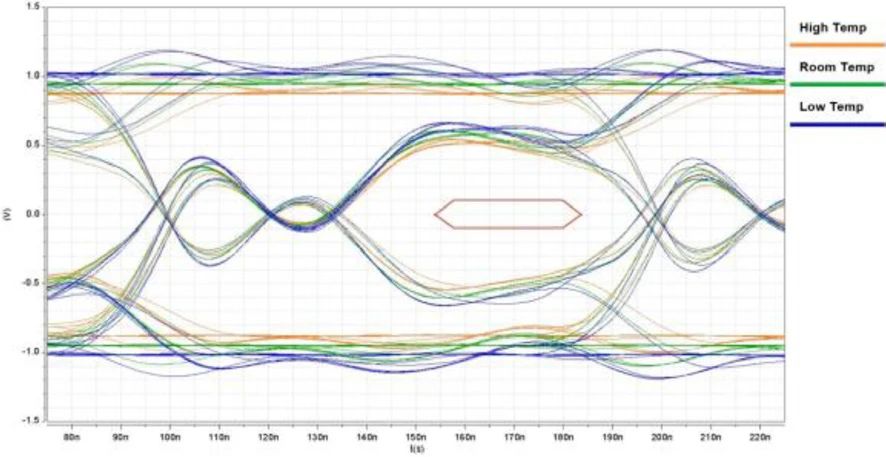 图11:10Mbit/s FAST模式下随温度变化的眼图仿真
图11:10Mbit/s FAST模式下随温度变化的眼图仿真
06# 总结
作为CAN家族的一项新技术,CAN XL不仅带来了诸如更高比特率、更大有效载荷、新填充规则和模式切换功能等创新。
这些创新也伴随着对网络的新要求,需要对其进行评估和验证。这包括从SIC模式到FAST模式的转换以及FAST模式本身。
在仿真和测量中,都以相同的采样点设置为基础。由于对比的眼图几乎相同,所以两种评估结果一致。仿真结果也通过测量结果得到了验证。因此,所使用的模型和自动化工具已经达到了很高的水平。
通过示例网络已经证明,仿真是验证CAN XL网络的有力工具。基于此,未来在指定标准和不同条件(如温度相关场景、电源电压Vcc变化和生产公差)的框架内,使用本文介绍的验证和评估方法通过软件仿真来评估CAN XL网络的FAST模式就足够了。这使得在不同的网络设计下,能够快速、有效且精确地在既定标准和条件下进行验证和评估。
07# 未来展望
CAN XL凭借其更高的带宽和传输速度,需要对更多可能影响信号完整性的因素进行细致考量。在早期CAN网络的验证中,这些因素并未得到充分考虑。对于CAN、CAN FD和CAN FD SIC而言,这些因素的影响较小,因此在网络验证中常常被忽视。然而,对于CAN XL,它们应当得到进一步的研究和明确界定。
特别是特殊电子和电气元件的使用,如共模扼流圈(CMC)、静电放电(ESD)二极管、连接器或非屏蔽双绞线(UTP)电缆的非扭绞区域,现在可能对信号完整性产生更大的影响。近端串扰和远端串扰在CAN和CAN FD中并不重要,但由于CAN XL带宽的增加,它们可能会更频繁地出现。
因此,可以预计未来需要为CAN XL网络优化特殊电气元件的设计,以最大程度地减少各种影响因素。
参考文献
[1] Isensee, Patrick; Ishikawa, Manabu: CAN FD Network Validation Simulation, validation criteria and an automated evaluation, 2017
[2] NA 052 - 00 - 31 - 03 AK (ISO/FDIS 11898 - 2): 29.11.2023, Road vehicles – Controller area network (CAN) – Part2: High - speed physical medium attachment (PMA) sublayer
文章来源
本文基于Ayat Taleb Alashkar和Christopher Walkhoff(C&S集团技术专家)在第18届国际CAN大会(iCC)的演讲。已刊于《第18届iCC会议论文集》2024版,由CiA出版。虹科智能互联团队翻译并分享,旨在与行业同仁共享前沿技术成果。
审核编辑 黄宇
-
CAN
+关注
关注
59文章
3093浏览量
473396 -
车载网络
+关注
关注
6文章
181浏览量
33219
发布评论请先 登录
CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?

【下载】《汽车CAN总线系统原理设计与应用》——车载网络系统研究参考资料
基于SVDD的车载CAN网络入侵检测方法

第三代CAN总线通信技术–CAN XL

对垒以太网10BASE-T1S,CAN XL能后来居上么?--CAN XL技术解读

恩智浦首席车载网络架构师开讲:CAN SIC与CAN XL芯片如何赋能未来汽车网络?
泰克推出全新CAN XL协议解码软件
泰克科技全新CAN XL协议解码软件上线

三代CAN技术演进:从CAN CC到CAN XL的创新路径(下篇)

CAN XL物理层揭秘(下):物理层组合与兼容性
博世推出新一代支持CAN XL的控制器IP




评论