 线上机器CPU占用高分析实践
线上机器CPU占用高分析实践

作者:京东零售 王江波
1. 线程运行状态
1.1 total
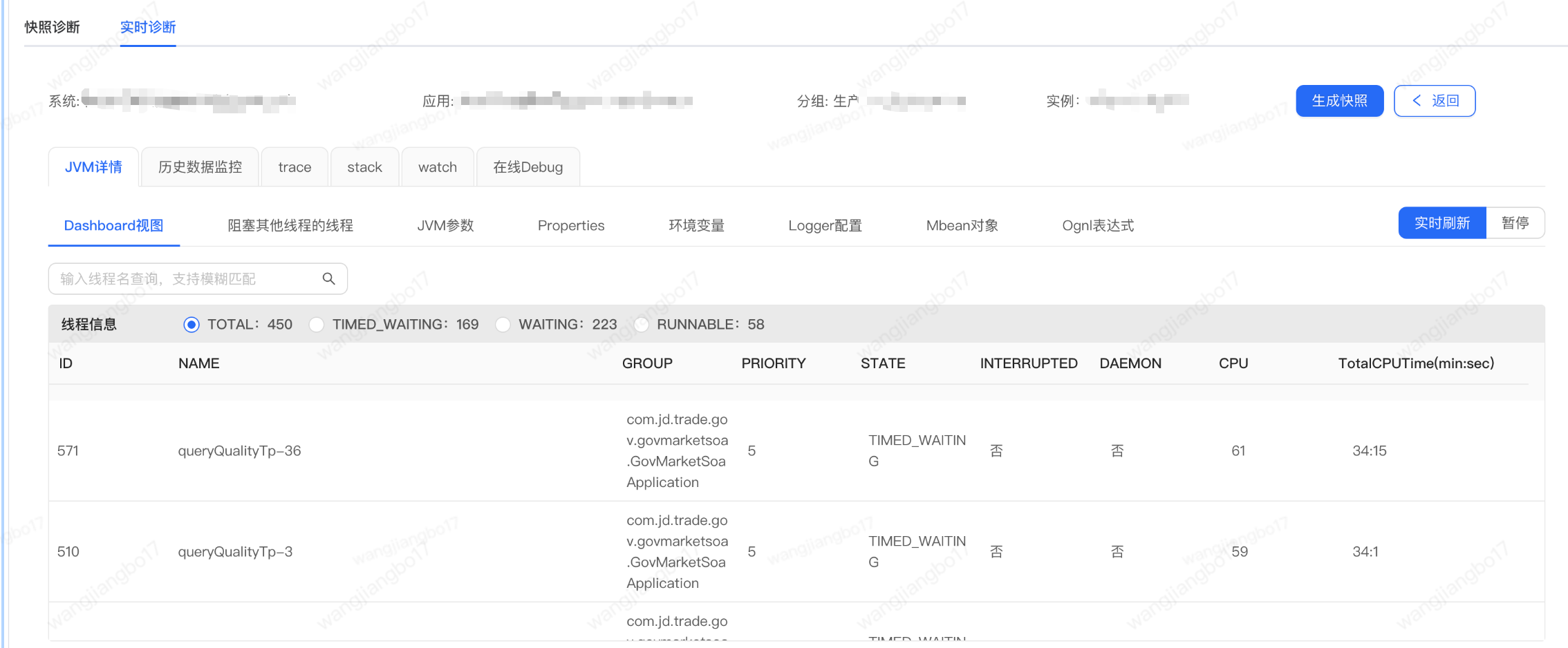
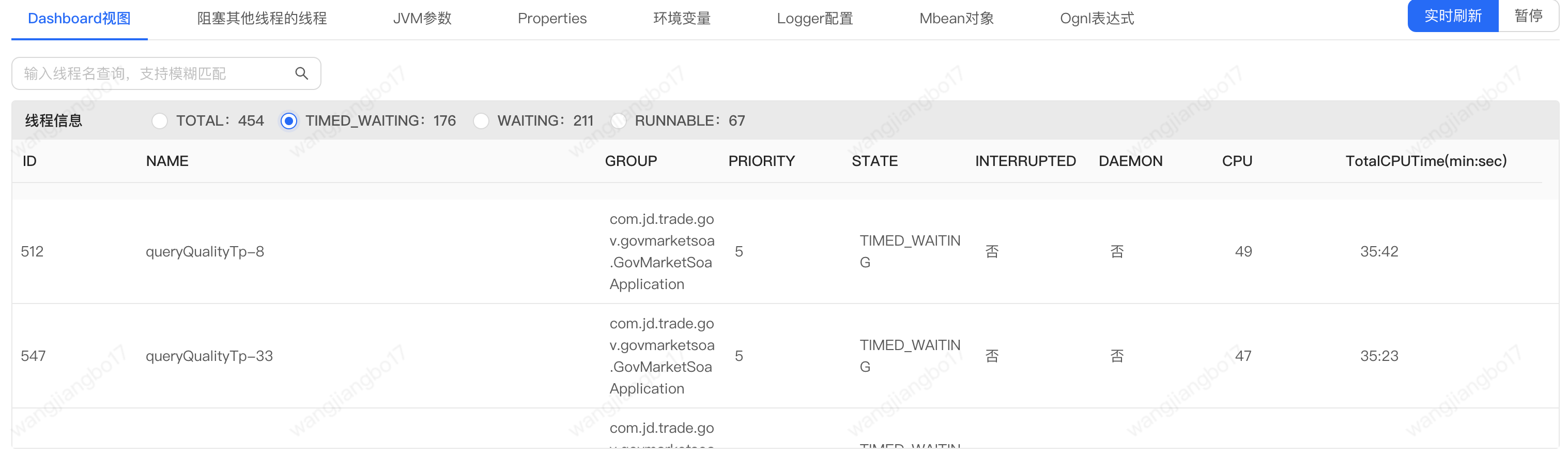
通过上图我们可以发现timed_waiting的topN线程都是查询国补资质的。
1.3 waiting
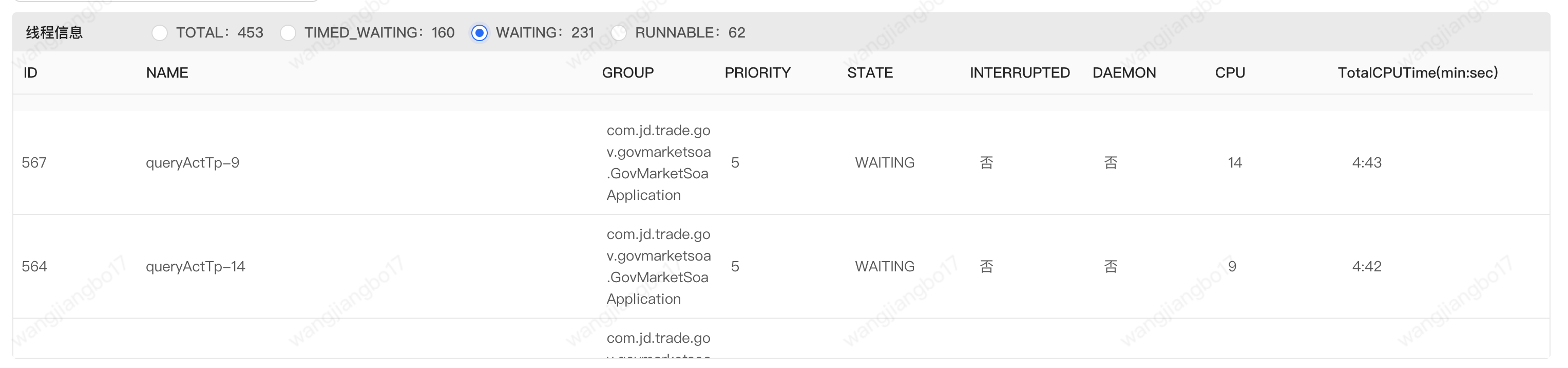
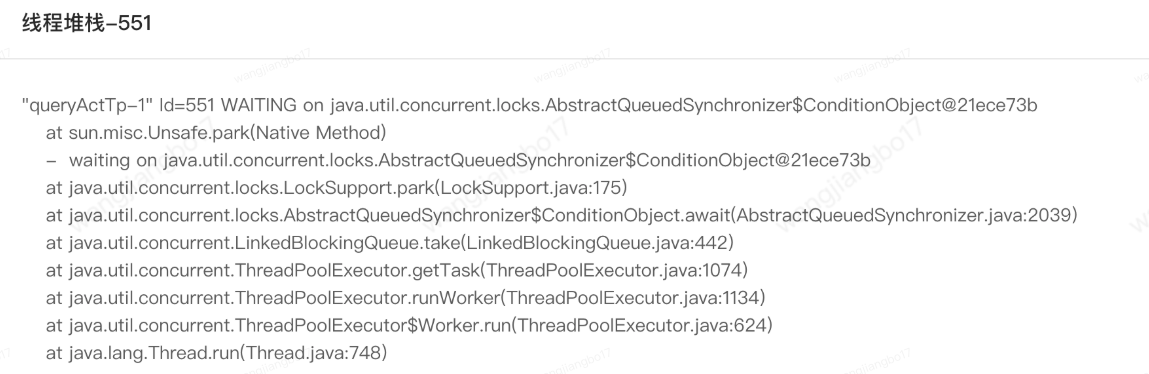
通过上图我们可以发现waiting的topN线程都是查询国补活动的。
1.4 线程分析
下面我们分析上述两种状态:
1. WAITING 状态
•定义:当一个线程处于 WAITING 状态时,它在等待另一个线程的特定操作(如通知或中断),并且不会继续执行。
•触发条件:线程进入 WAITING 状态的常见情况包括:
调用 Object.wait() 方法:线程在等待某个对象的监视器(锁)被其他线程通知。
调用 Thread.join() 方法:等待另一个线程完成。
调用 LockSupport.park() 方法:线程被阻塞,直到它被其他线程唤醒。
•恢复:线程在 WAITING 状态下将一直保持此状态,直到其他线程调用 notify() 或 notifyAll()(对于 Object.wait()),或者被中断。
2. TIMED_WAITING 状态
•定义:当一个线程处于 TIMED_WAITING 状态时,它在等待某个条件的发生,但它会在指定的时间后自动返回。
•触发条件:线程进入 TIMED_WAITING 状态的常见情况包括:
调用 Thread.sleep(milliseconds):线程休眠指定的毫秒数。
调用 Object.wait(milliseconds):线程在等待某个对象的监视器(锁),并且在指定的时间内等待。
调用 Thread.join(milliseconds):等待另一个线程完成,但有时间限制。
调用 LockSupport.parkNanos() 或 LockSupport.parkUntil()。
•恢复:线程在 TIMED_WAITING 状态下会在指定的时间结束后自动恢复,或者在其他线程调用 notify() 或 notifyAll() 时恢复。
| 状态 | 描述 | 触发条件 | 恢复方式 | |----------------|------------------------------------------|---------------------------------------------|--------------------------------------------| | **WAITING** | 线程等待另一个线程的特定操作,不会继续执行 | `Object.wait()`, `Thread.join()`, `LockSupport.park()` | 其他线程调用 `notify()`/`notifyAll()` 或被中断 | | **TIMED_WAITING** | 线程等待某个条件的发生,但有时间限制 | `Thread.sleep(milliseconds)`, `Object.wait(milliseconds)`, `Thread.join(milliseconds)` | 超过指定时间后自动恢复,或其他线程调用 `notify()`/`notifyAll()` |
下面我们结合实际代码情况分析:

上文中 queryActTp 为 getActivityInfo 执行并发任务,其中包含两个子任务、 queryQualityTp 为 getQualityInfo 执行并发任务,其中五个子任务。同时将这俩任务放到queryActAndQualityTp中并行。
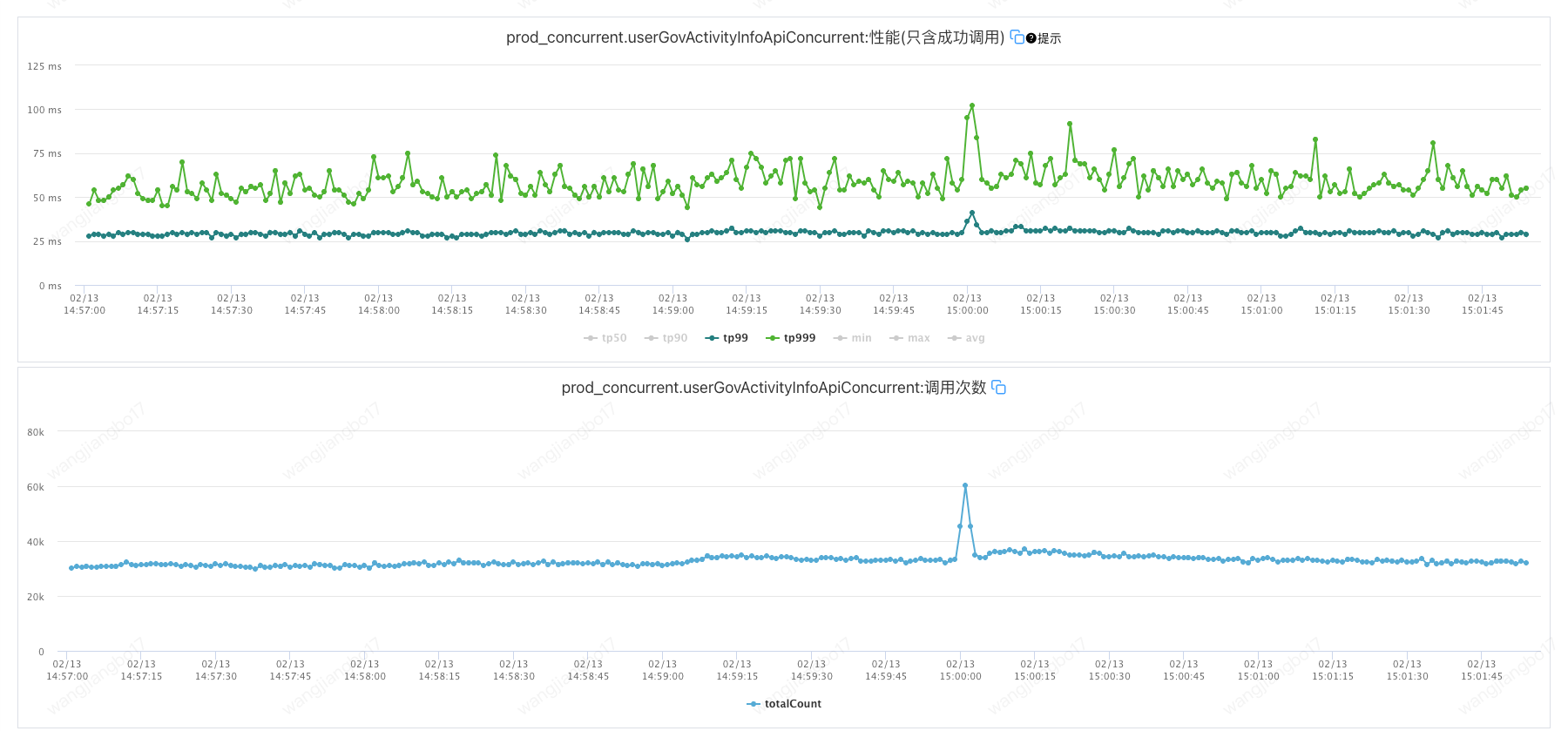
getActivityInfo所在的秒级监控如下:
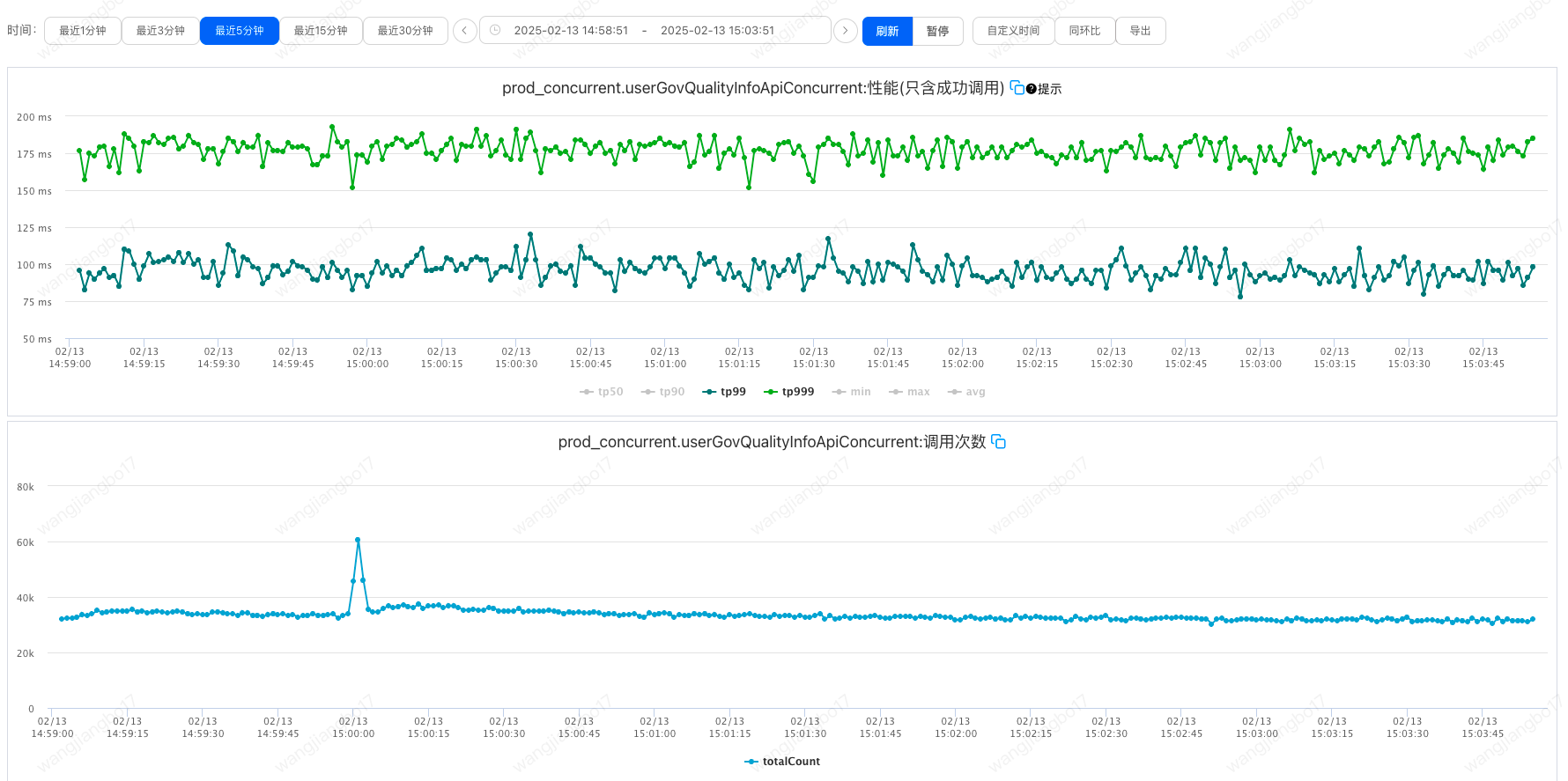
getQualityInfo所在的秒级监控如下;
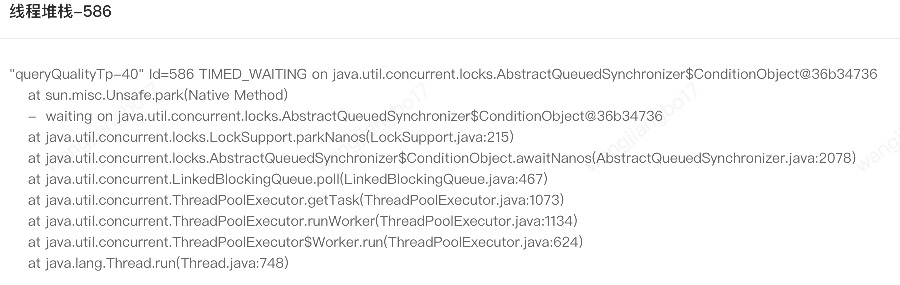
上文中同样的调用方式,但是出现了两种线程状态,理论上应该都是TIMED_WAITING。针对queryActTp我们可以发现堆栈信息中也是LockSupport.park而不是LockSupport.parkNanos。具体原因有待进一步分析。
上述代码中还有一个问题就是A线程池中又并行调用了B、C线程池,在大流量情况下,CPU频繁切换也会造成一定的CPU压力,我们改写这块逻辑用一个线程池实现活动和资质的并发查询。鉴于改动较大,本次先不动。
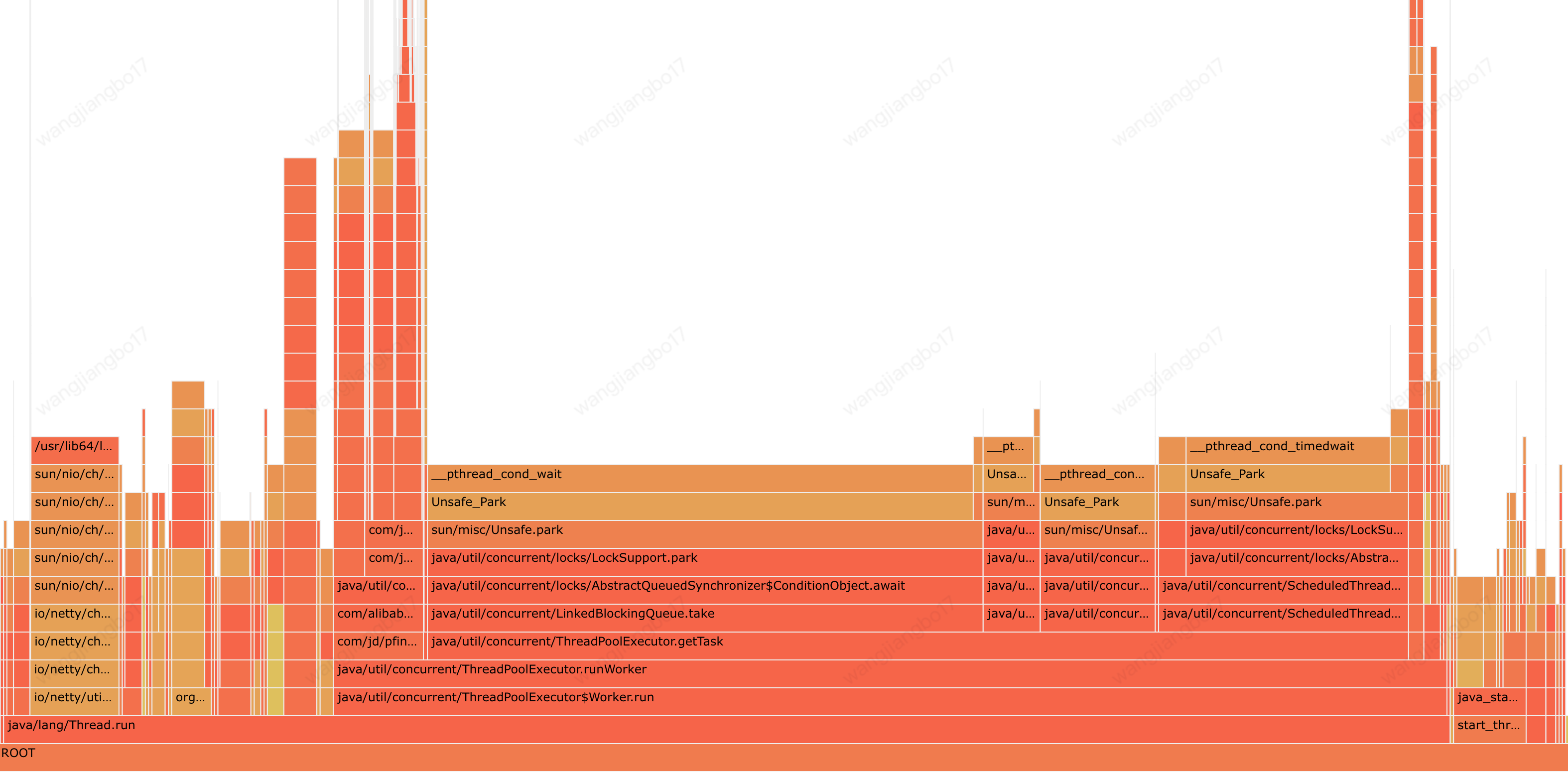
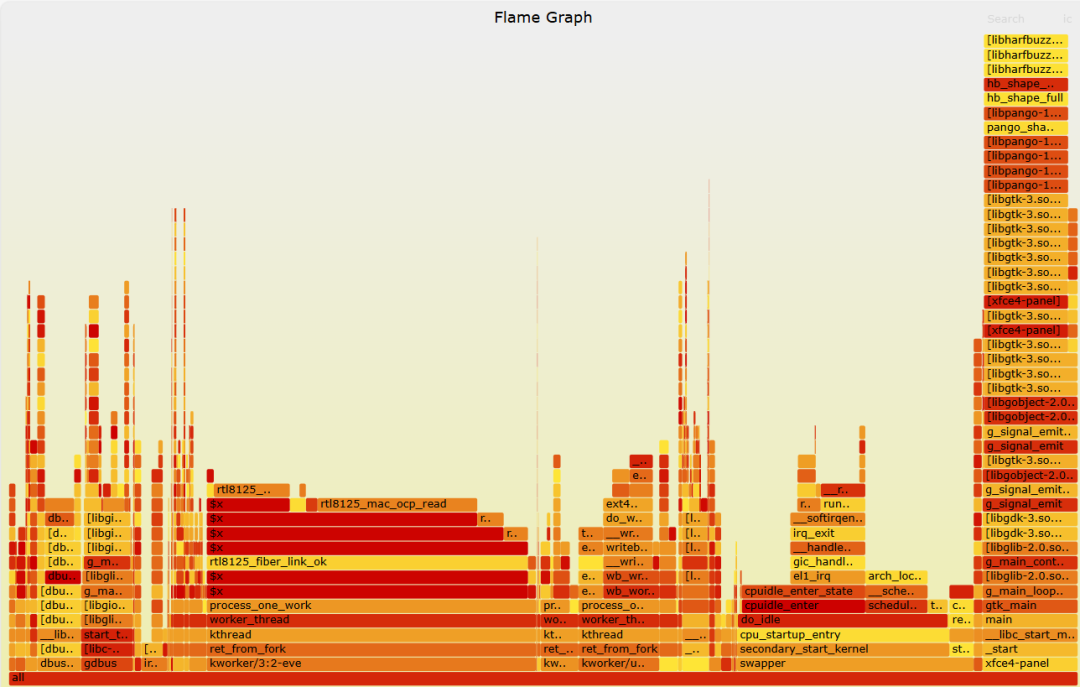
2. 火焰图分析

2.1 wait线程
2.2 锁性能

2.3 CPU采样
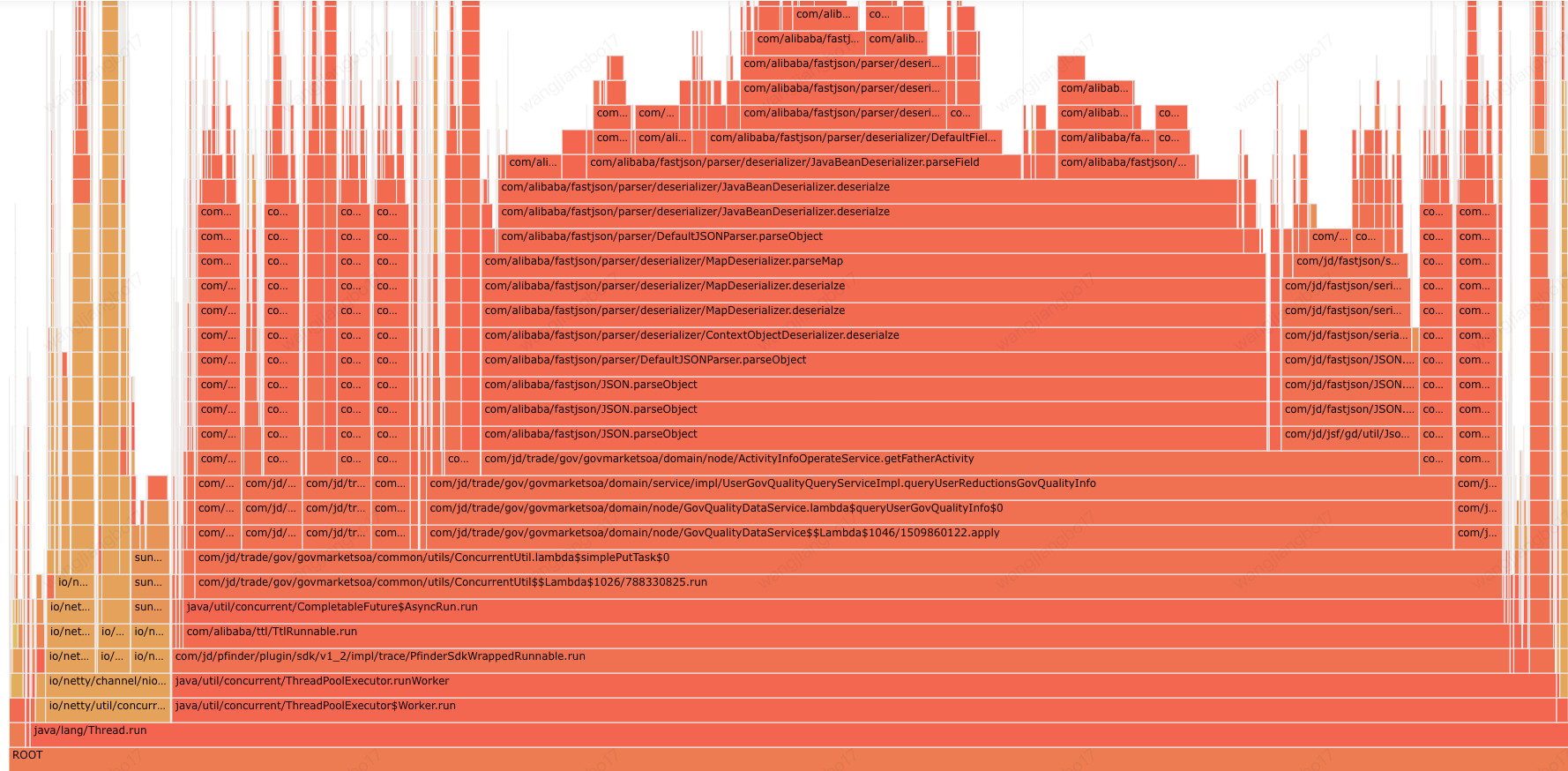
2.3.1 getFatherActivity分析
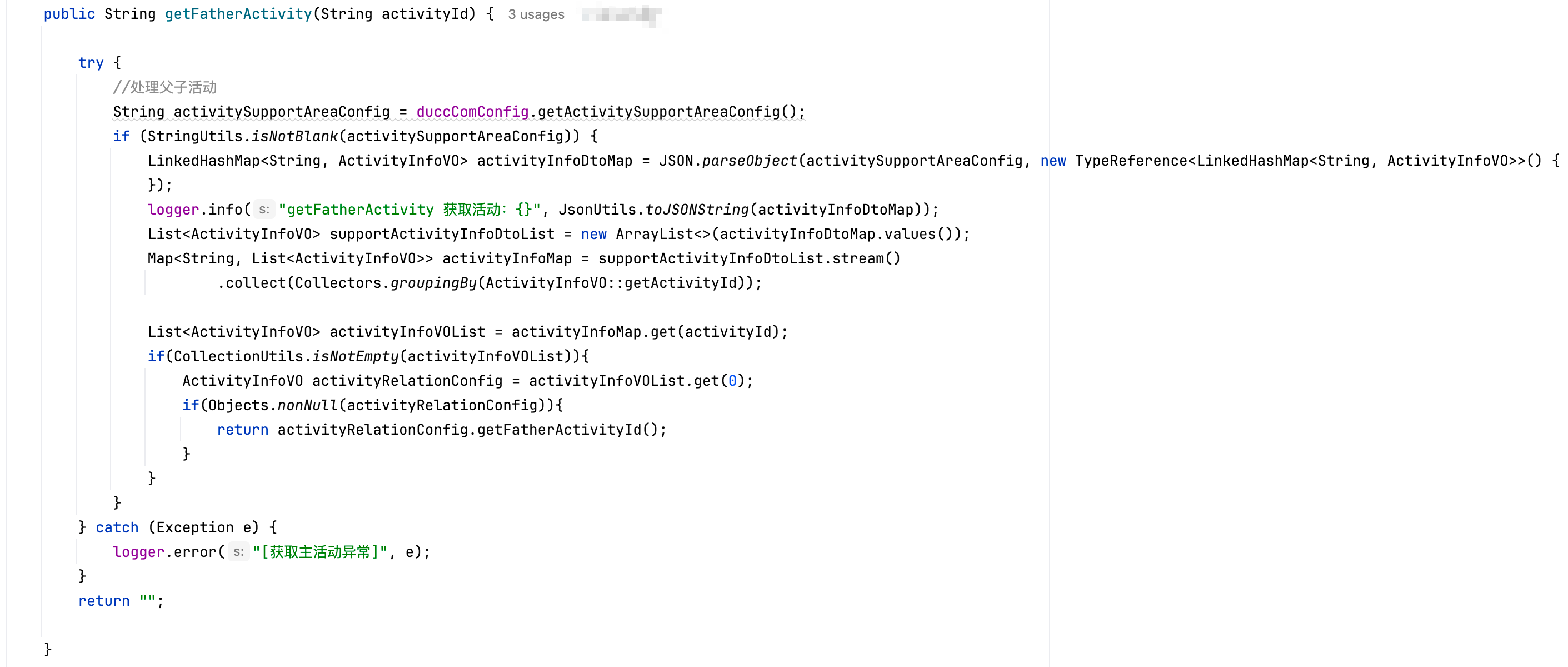
Q1:调用场景:循环中调用getFatherActivity
Q2:查看配置数据,json格式化后50000字符,大对象的反序列化
Q3:使用new ArrayList() 创建新对象
Q4:分组后只用了对象中的第一个元素,这里用toMap更佳
优化1:
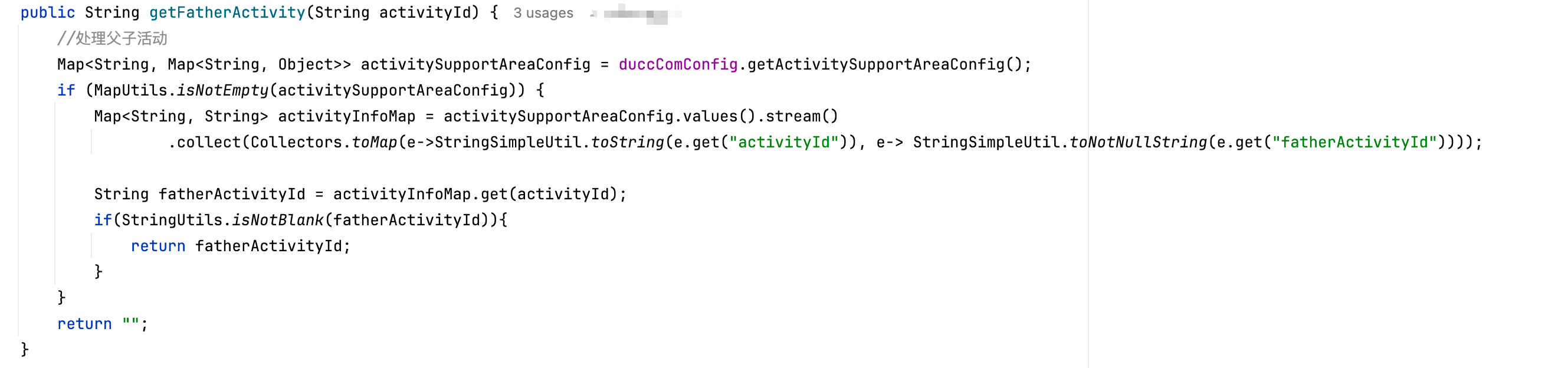
我们可以发现上文在循环中还是会存在多次的stream调用,继而将toMap逻辑提到循环外,如下:
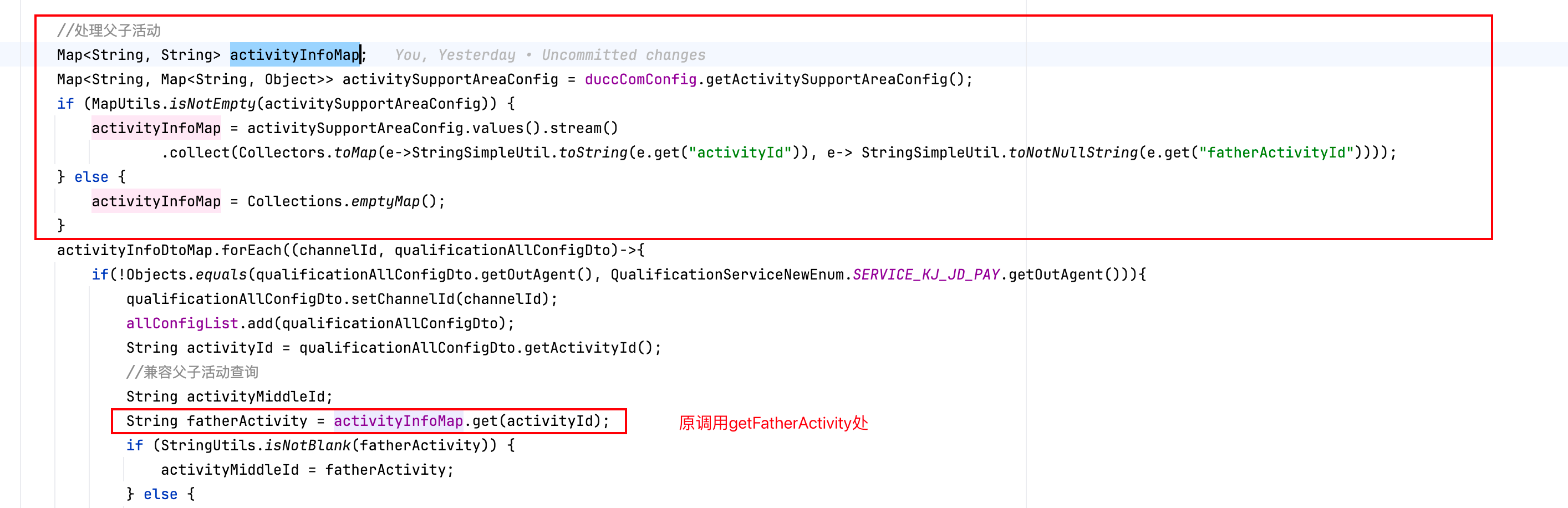
其他方法确实占用CPU较高,这里先不处理。
下文再优化一项获取并发线程执行结果的工具类:
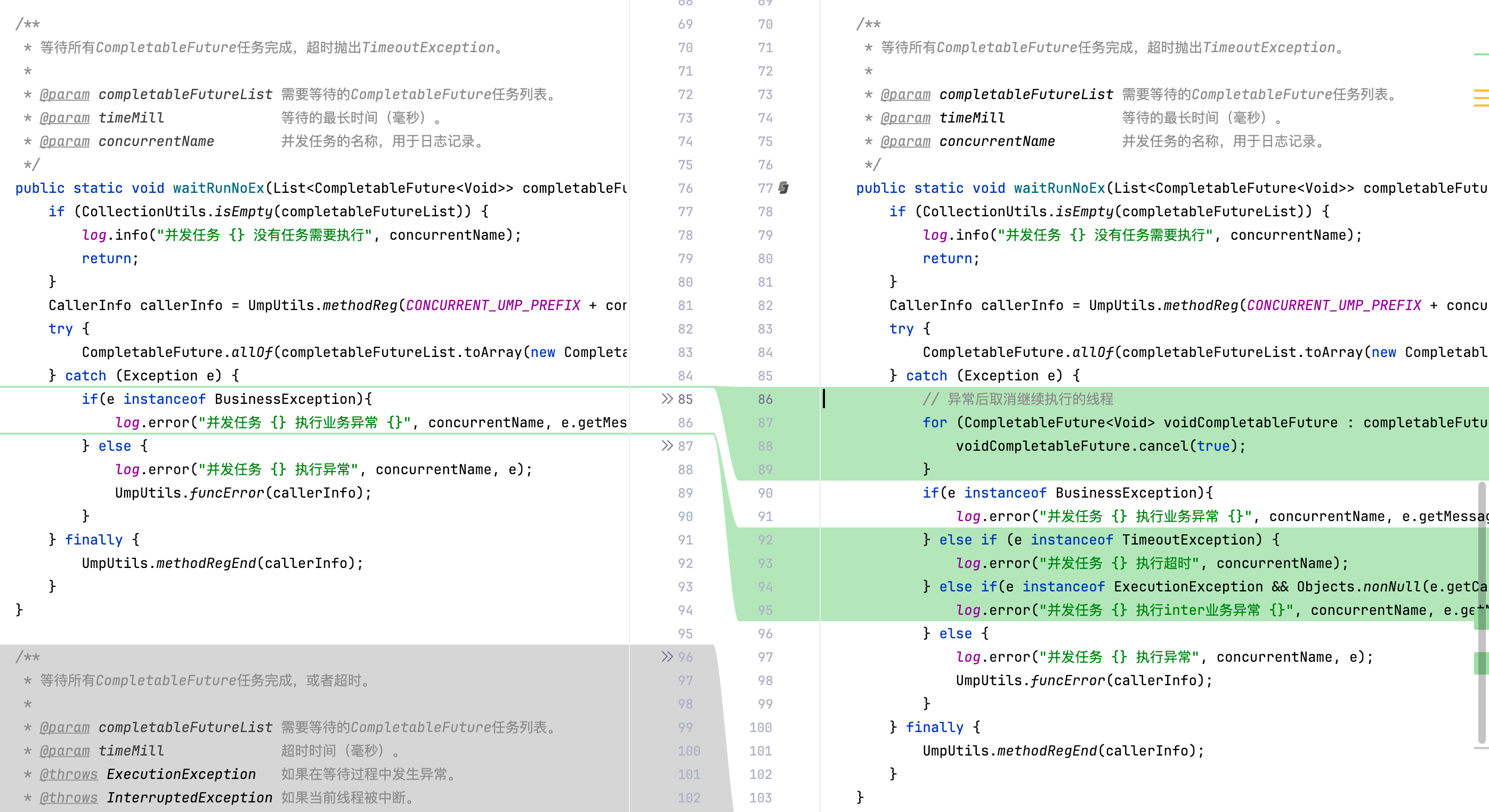
1、 allOf异常后,取消所有线程的继续执行。这么做为了防止有些线程超时后仍在执行,浪费部分CPU资源,线上发现确实存在较多的超时情况。 2、 这里的异常日志较多,根据异常类型进行区分,去掉没用的堆栈日志。
并发线程中所有的等待统一都使用了上文的方法,前文中的queryActTp处于WAITING状态可能也是执行没取消导致,修改部署后再观察分析。同样的调用方式 queryQualityTp 处于Timed_waiting状态可能与一次父任务中子任务的执行耗时有关,见上文监控,活动和资质相差较大,具体原因有待进一步分析。
审核编辑 黄宇
-
cpu
+关注
关注
68文章
11331浏览量
225910
发布评论请先 登录
共聚焦显微技术在高分子科学中的应用与实践

基于Arm架构服务器释放更高CPU利用率
Linux性能分析实战:用trace揪出卡顿、高CPU的“真凶”
机器视觉网卡的全面选型指南

低 ESR 突破 3mΩ:固态叠层高分子电容在车载 DC-DC 的应用实践
时钟周期、机器周期、指令周期介绍
在英伟达Thor平台部署EtherCAT主站:实测高性能、低抖动与低占用
在英伟达Thor平台部署EtherCAT主站:实测高性能、低抖动与低占用
在高性能 AI 平台上部署 EtherCAT 主站:实测低抖动、低占用方案

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小批量SMT打样上机费,是“乱收费”还是“必要成本”?
单核CPU网关和双核CPU网关有什么区别
热重分析仪在高分子材料中的应用




评论