 运动控制中如何实现路径轨迹预测
运动控制中如何实现路径轨迹预测

在运动控制中,轨迹执行时间的预测对于多轴的协同、路径预处理等方面有着重要的作用。CODESYS系列控制器提供了预测轨迹执行时间功能块。要实现完整的预测功能,需要使用到以下的功能块。
SMC_SetForecast
这个功能块专门用于为指定轴设定预测,其预测时长被限定在最多512个任务周期。通过这种预测设置,用户能够预先获取轴在未来特定时间点的状态信息,包括:
持续时间预测:利用SMC_GetTravelTime功能,可以计算出轴到达某一特定位置所需的时间。
动态信息获取:通过SMC_ReadSetValues,能够在特定时间点获取轴的动态信息。
预测时长查询:使用SMC_GetForecast可以读取当前的预测时长。
| 范围 | 名称 | 数据类型 | 说明 |
|---|---|---|---|
| 输入/输出 | Axis | AXIS_REF_SM3 | 指定要操作的轴 |
| 输入 | Execute | BOOL | 上升沿:设置预测持续时间 |
| ForecastDuration | LREAL | 轨迹预测的持续时间(以秒为单位) | |
| 输出 | Done | BOOL | TRUE:预测已成功设置 |
| Error | BOOL | TRUE: 在执行过程中发生了错误 | |
| ErrorID | SMC_ERROR | 错误ID |
SMC_GetForecast
该功能块返回给定轴的预测时间,是由SMC_SetForecast 功能块设置的。
| 范围 | 名称 | 数据类型 | 说明 |
| 输入/输出 | Axis | AXIS_REF_SM3 | 指定要操作的轴 |
| 输入 | Enable | BOOL | TRUE: 预测是持续读取的 |
| 输出 | Valid | BOOL | TRUE: 预测已成功读取 |
| Busy | BOOL | TRUE: 正在执行中 | |
| Error | BOOL | TRUE: 正在运行中 | |
| ErrorID | SMC_ERROR | 执行过程中出现了错误 | |
| ForecastDuration | LREAL | 预测持续时间以秒为单位 |
SMC_GetTravelTime
此功能块能够预测轴到达指定位置所需的时间。
要获取有效的时间预测,需要先通过SMC_SetForecast设置预测持续时间,确保轴在预测时间内能到达指定位置。如果轴没有移动,即使它正好在指定位置,Valid也会显示为FALSE。
| 范围 | 名称 | 数据类型 | 说明 |
|---|---|---|---|
| 输入/输出 | Axis | AXIS_REF_SM3 | 指定要操作的轴 |
| 输入 | Enable | BOOL | 使能功能块 |
| Position | LREAL | 指定轴的位置 | |
| Direction | SMC_CAMTAPPETTYPE | 功能块对轴的移动方向是有要求的,它只关注轴按照预设方向到达位置的情况 | |
| 输出 | Valid | BOOL | 输出的持续时间是否有效 |
| Duration | LREAL |
以秒为单位的从当前控制周期开始到达特定位置的预计时间,具有亚周期精度。 预计时间为0秒表示轴已在上一个周期到达位置,而等于任务间隔的预计时间则意味着轴将在当前周期内到达位置。 |
|
| Error | BOOL | 是否发生了错误 | |
| ErrorId | SMC_ERROR | 错误ID |
SMC_ReadSetValues
该功能块用于读取轴的设定位置、速度、加速度和加加速度。允许设置一个正的时间偏移量(TimeOffset),以读取未来的设定值。当时间偏移量(TimeOffset)= 0时,将读取当前周期开始时的设定值。
| 范围 | 名称 | 数据类型 | 说明 |
|---|---|---|---|
| 输入/输出 | Axis | AXIS_REF_SM3 | 指定要操作的轴 |
| 输入 | Enable | BOOL | 使能功能块 |
| TimeOffset | LREAL |
时间偏移量,必须位于0和使用SMC_SetForecast设置的预测时长(ForecastDuration)之间。 如果时间偏移量超出此范围,将报告错误SMC_INVALID_PARAMETER。 |
|
| 输出 | Valid | BOOL | TRUE: 输出有效标志 |
| Busy | BOOL | TRUE: 正在执行中 | |
| Error | BOOL | TRUE: 发生错误 | |
| ErrorID | SMC_ERROR | 错误ID | |
| Position | LREAL | 位置信息 | |
| Velocity | LREAL | 速度信息 | |
| Acceleration | LREAL | 加速度信息 | |
| Jerk | LREAL | 加加速度信息 |
程序示例
CASE state OF
STATE_POWER_DRIVE: //轴使能
mcp.Enable := TRUE;
mcp.bDriveStart := TRUE;
mcp.bRegulatorOn := TRUE;
IF mcp.Status THEN
state := STATE_SET_FORECAST;
ELSIF mcp.Error THEN
error := mcp.ErrorID;
state := state + STATE_ERROR;
END_IF
STATE_SET_FORECAST: //设置轨迹预测时长
setForecast.Execute := TRUE;
setForecast.ForecastDuration := 0.3; //0.3S
getForecast.Enable := TRUE;
IF setForecast.Done THEN
state := STATE_MOVE_TO_POSITION;
ELSIF setForecast.Error THEN
error := setForecast.ErrorID;
state := state + STATE_ERROR;
END_IF
STATE_MOVE_TO_POSITION: //MC_MoveAbsolute
ma.Execute := TRUE;
ma.Position := 10;
ma.Velocity := 20;
ma.Acceleration := 200;
ma.Deceleration := 200;
ma.Jerk := 1000;
timeToPosition.Enable := TRUE;
timeToPosition.Position := 8; //预测到达8时,所用的时间
IF ma.Error THEN
error := ma.ErrorID;
state := state + STATE_ERROR;
END_IF
END_CASE
setForecast(Axis:= Drive);
getForecast(Axis:= Drive);
mcp(Axis:= Drive);
ma(Axis:= Drive);
timeToPosition(Axis:= Drive);
readSetValues(
Axis:= Drive,
Enable:= timeToPosition.Valid,
TimeOffset:=timeToPosition.Duration);
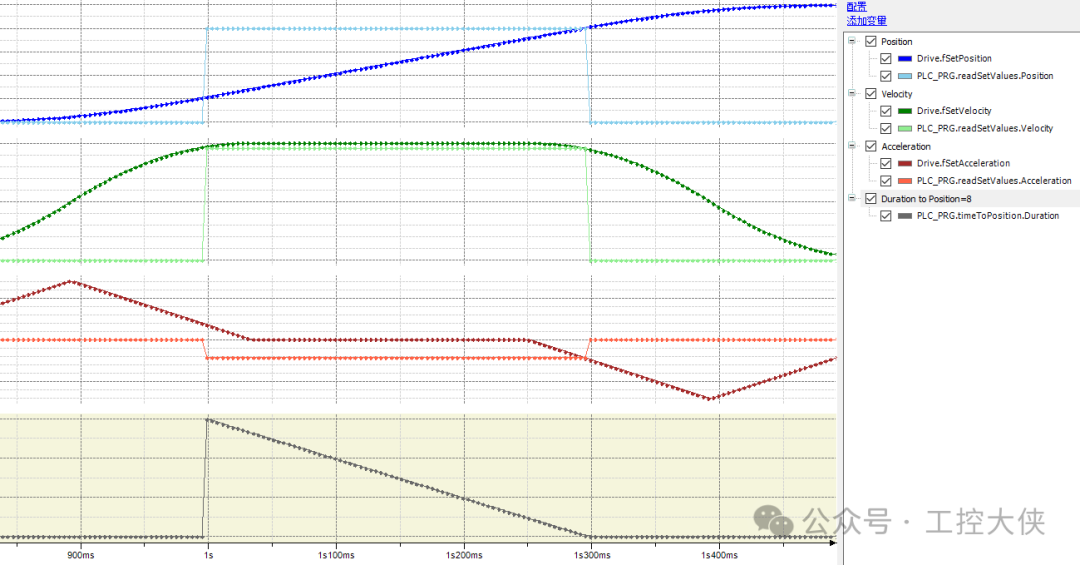
可通过采集到的波形图观察对于轨迹预测的效果。
-
控制器
+关注
关注
114文章
17879浏览量
195157 -
运动控制
+关注
关注
5文章
839浏览量
34670 -
CoDeSys
+关注
关注
12文章
47浏览量
19579
原文标题:运动控制中如何实现路径轨迹预测?
文章出处:【微信号:gkongbbs,微信公众号:工控论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



labview如何实现数据的采集与实时预测
自动驾驶为什么要重视轨迹预测?

Nullmax端到端轨迹规划论文入选AAAI 2026

基于全局预测历史的gshare分支预测器的实现细节







评论