 多种传感器集成,IMU助力无人机稳定飞行
多种传感器集成,IMU助力无人机稳定飞行

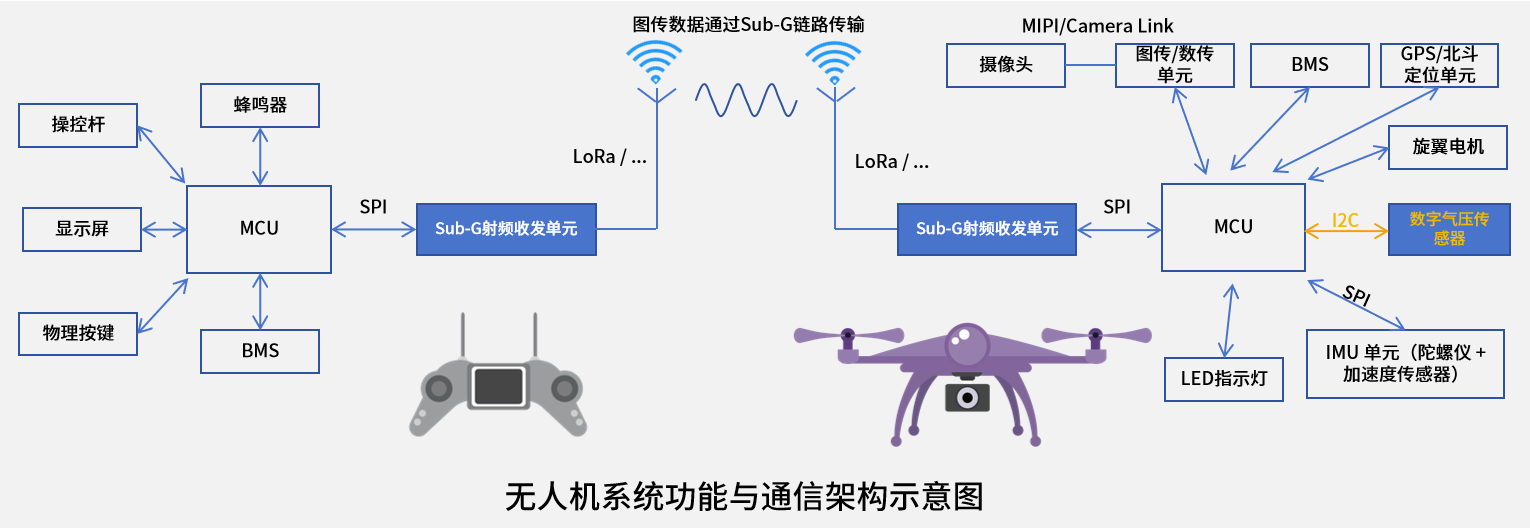
传感器是无人机飞行控制系统的核心组件,负责采集无人机及周围环境的数据,例如无人机的位置、速度、姿态等信息。
常见的传感器包括[陀螺仪]、加速度计、磁力计(指南针)、气压计(高度计)和GPS模块,大多数IMU只集成陀螺仪和加速度计。
我们现有一款IMU ER-MIMU-16,将陀螺仪、加速度计、磁力计与气压计等传感器集成于一体,非常适合无人机。
多种高性能传感器集成
陀螺仪:动态测量范围±450º/s,零偏不稳定性0.3º/h,角速度随机游走0.15º/√h;
加速度计:动态测量范围±30g,零偏不稳定性10ug,偏置重复性为100ug;
陀螺仪与加速度计提供的角速度和加速度数据,通过系统计算可获得无人机姿态、速度、位移等信息。
磁力计:动态测量范围±2.5Gauss,测量所承受磁场的数据,提供磁北方向。
气压计:压力范围450~1100mbar,通过测量大气压强,提供的数据能协助飞控系统导航无人机上升到所需的高度。
[IMU]提供的数据能帮助飞控系统实时监测无人机姿态变化,实现稳定性控制。
陕西艾瑞科惯性技术有限公司 https://www.ericcotech.com/
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55892浏览量
795745 -
无人机
+关注
关注
237文章
11472浏览量
197231 -
IMU
+关注
关注
6文章
439浏览量
48205
发布评论请先 登录
相关推荐
热点推荐
四轴无人机控制核心丨笙泉新品(CGF062A) 融合MCU与MDE优势, 实现稳定高效的飞行表现
与可调性的BLDC控制解决方案。
CGF062A功能方框图
小结
综合而言,无人机的稳定飞行仰赖精准的姿态控制与高效率的马达驱动技术。前者透过飞行控制
发表于 05-06 14:10
无人机飞行试验包括哪些方面?具体操作步骤是什么?需要哪些设备
无人机飞行试验是无人机研发、生产和应用过程中极为关键的一环。它旨在验证无人机的飞行性能、稳定性、

高性能MEMS IMU:重构无人机飞行控制核心
在无人机的飞行系统中,惯性测量单元(IMU)是决定飞行稳定性、导航精度与环境适应性的 “运动神经中枢”。ER-MIMU-M02 作为一款高性
无人机超声波传感器:低空飞行的“智慧之眼”
挑战。贝弗德超声波传感器凭借其独特的优势,成为无人机低空飞行的“智慧之眼”,为无人机的安全与稳定保驾护航。
无人机操控核心:智能飞行的技术引擎
。 技术架构:三层协同设计 无人机的操控核心可分为硬件层、算法层和应用层。硬件层以飞控单元(FCU)为中心,集成IMU(惯性测量单元)、GNSS(全球导航卫星系统)模块、气压计等传感器
无人机如何靠陀螺仪保持稳定飞行?
在无人机的飞行过程中,你是否好奇它是如何保持稳定、精准转向甚至抵抗风力干扰的?答案就藏在它的“神经中枢”——ER-3MG-043三轴陀螺仪中。这款高性能传感器凭借卓越的角速度测量能力,

MEMS陀螺如何成为无人机稳定飞行的核心?
控进行姿态解算和维持飞行稳定的关键依据。 ER-3MG-103 MEMS三轴陀螺仪,正是为满足现代无人机严苛要求而生的高性能传感器。它如何奠定稳定
为什么IMU是无人机稳定控制的的核心?
在无人机从消费级向工业级/行业级跨越的过程中,"精准" 与 "稳定" 成为核心竞争力,这依赖于底层惯性测量技术的突破。IMU是无人机稳定控制
使用高精度IMU对无人机系统有何提升?
在无人机自主飞行的核心技术链条中,惯性测量单元(IMU)的精度与可靠性直接决定了整机的控制上限。高精度IMU对无人机系统的提升是全方位的,尤
IMU 能为无人机提供什么数据?
无人机在进行任何形式的飞行时,必须了解空中平台的方向、其运动的性质以及飞行方向。
通常用于测量此运动的是IMU,IMU提供
为什么高端无人机不会在IMU精度上妥协?
姿态控制精度与系统集成度现已成为制约无人机性能提升的关键瓶颈。无人机通过IMU集成的陀螺仪与加速度计,实现对三维空间姿态(角速度、加速度)数
适用于无人机的 IMU 有哪些要求?
惯性测量单元(IMU)作为无人机飞行时运动感知的核心部件,它通过整合陀螺仪、加速度计,有时还包括磁力计、气压计等多种传感器的数据,全面掌握




评论