 【实战】Python+OpenCV车道线检测识别项目:实现L2级别自动驾驶必备(配套课程+平台实践)
【实战】Python+OpenCV车道线检测识别项目:实现L2级别自动驾驶必备(配套课程+平台实践)

01 引言

最近,特斯拉的FSD V13.2版本引起了行业震动,它带来了停车启动、自动换挡等新功能,还实现了全程自动驾驶。这不仅是技术的飞跃,更是对自动驾驶未来的一次大胆展望。今天我们聊一下自动驾驶领域的一个必备技能——车道线检测。
本文将详细介绍一个车道线检测项目的过程,从图像采集到车道线的准确识别,看看在L2自动驾驶中,如何通过图像处理技术,让汽车“看”得更清楚,行驶得更安全。
02 项目功能
本项目旨在通过摄像头捕捉的道路图像,运用图像处理技术,实现车道线的自动检测,为自动驾驶车辆提供精确的路径信息。项目的核心在于边缘检测技术,通过这一技术,车辆能够识别道路边缘,为后面的车道线检测提供非常重要的基础信息。
03 操作步骤
步骤一:图像采集与预处理
通过车辆前置摄像头获取原始道路图像,这些图像包含了道路、车辆、行人等多种元素。为了提高车道线检测的准确性,首先需要对图像进行预处理。
①经过OpenCV读取,将图片转化为OpenCV所对应的格式,方便后面的图像处理。

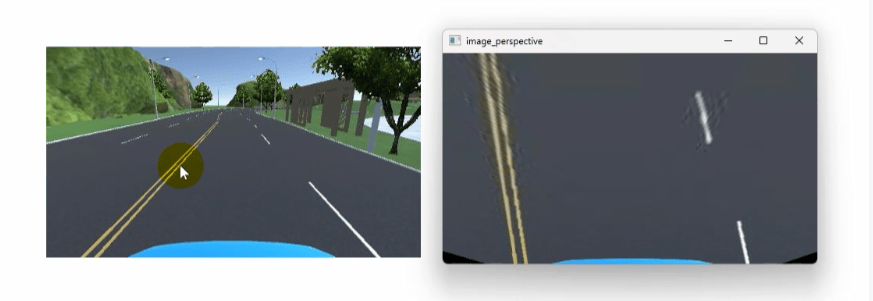
②透视变换:将原始图像通过透视变换技术转换成鸟瞰图,排除建筑物、行人等外在因素的干扰,专注于道路图像的像素处理。

步骤二:图像边缘检测
①噪声抑制,将图像变得更加平滑,滤除图片噪声。

②计算梯度幅值和方向。

③非极大值抑制处理,过滤掉较小的梯度和不合理的方向,保留重要的边缘信息。

④双阈值检测与边缘连接,通过双阈值检测和边缘连接技术,得到完整的车道线。

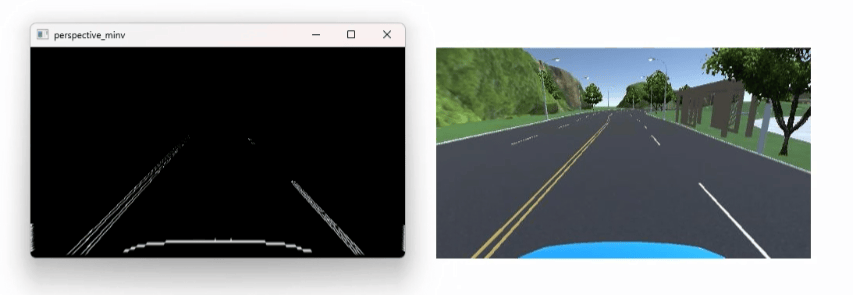
步骤三:逆透视变换
经过边缘检测后,得到的车道线图像需要通过逆透视变换技术,将检测到的车道线准确地映射回原始图像中,确保车道线的位置与实际道路一致。
上述操作过程就是一个完整的车道线检测项目,但只是简单地针对一张图片获取以及处理的操作步骤,具体的车道线检测项目是一个连续的实时处理过程,不仅仅涉及单张图片的处理,而是需要系统不断地从车载摄像头获取连续的实时图像流,然后这些图像流被不断地处理和分析,实现对车道线的持续性检测。
这种连续的图像处理和车道线检测是确保智能驾驶系统能够准确识别道路边界、维持车辆在车道中稳定行驶的关键,最终才能构成一个完整的车道线检测项目。
04 项目实战课
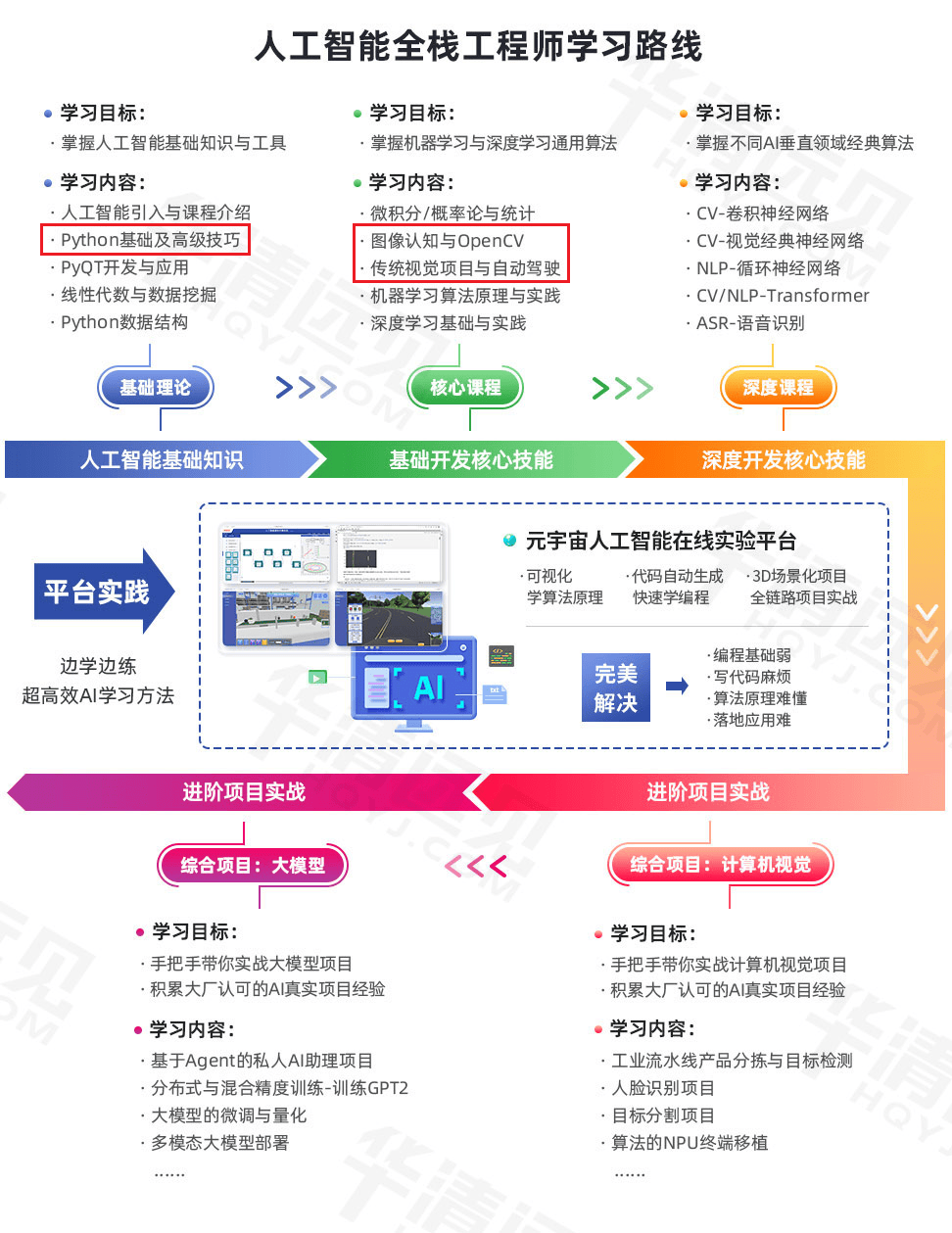
Python+OpenCV车道线检测这个项目,大家要想体系化的学习并实战,推荐学习华清远见全栈工程师课程里红框标题的这部分课程内容(如下图)。可以手把手带领大家,从Python基础编程开发,到图像认知与OpenCV,再到完整车道线检测项目的实战。
这部分课程是讲师真人大屏授课,带字幕,总共307讲,培训级别精讲视频。然后实践环节是,所有算法及项目都可以通过在线平台实操,边学边练,还有3D场景的沉浸式体验。
这部分课程不单卖,可以直接购买人工智能VIP会员(按月/半年),就可以看上面红框内容的教学视频,当然如果您对AI体系课其他内容也感兴趣的话,购买了人工智能VIP会员也是能看的,看不完的续费看就可以。
AI全体系课程有1000+讲,是针对0基础学生的AI全栈学习,覆盖90% AI岗位技能,积累大厂真实项目经验!
05 项目实战平台
车牌识别项目的全部操作依托元宇宙人工智能在线实验平台进行,平台为学习者们提供了一个高效、灵活的环境,可以在平台上无限次试错,在项目实现过程中不断调试参数,直到实现预期结果,更好地理解算法的工作原理。
平台特色
【算法原理讲解】
平台将算法进行拆分与可视化,把算法拆分成多个组件,复杂的东西一旦进行拆分(分而治之)就会变得简单多了,然后通过平台仿真动画深入浅出的讲解原理,理解算法每一环节的原理及运行结果,而且我们可以交互式地动态调整算法参数,实时看算法运行结果变化,更好的去理解算法的原理,让算法学习更加直观和有趣。
【代码编程实现】
人工智能在线实验平台可以将人工智能算法,快速生成Python代码,而且当算法组件动态调参时,也可以看到Python代码的实时变化,算法和代码一一对应,这个功能可以帮助初学者快速的去应用算法,跑起来,看到效果,产生学习的兴趣。然后在算法应用学习中,去理解代码,去加深Python编程学习,这样边学边用编程学习更高效。
【3D项目实战】
平台采用“3D应用场景案例实战”教学,提供众多3D场景化综合项目实战,包括:智能分拣系统、智能驾驶系统、智能垃圾分类、智能对话系统等。
逻辑与算法可接入系统里预设的3D场景中,实现可视化交互体验,覆盖从数据采集、标注、模型训练、预测、部署到测试的整个项目周期,打造人工智能沉浸式实操环境。学生既能体验全链路落地实战项目,填补理论与实践之间的鸿沟,又能提高实际操作能力和解决问题的能力。还可将程序通过编程接口API轻松部署到硬件平台,进行迁移学习,为AI基础学习和可视化算法实践提供强大的项目落地应用平台。

平台教学子系统
上面车牌识别项目主要就是用到平台教学子系统中的【机器视觉】部分,平台除此之外,还提供很多系统子模块,如:机器学习、深度学习基础、CV-卷积神经网络、视觉经典神经网络、NLP循环神经网络、CV-NLP-Transformer、综合项目应用场景等,将理论知识变得直观生动,同时为理论知识的应用提供了项目开发与实践的环境。

想免费体验该AI在线实验平台,后台私信雯雯老师(备注:平台体验),0元免费领取平台体验名额哦,名额有限, 机不可失!
-
机器视觉
+关注
关注
166文章
4832浏览量
126553 -
人工智能
+关注
关注
1821文章
50376浏览量
267090 -
OpenCV
+关注
关注
33文章
652浏览量
45113 -
python
+关注
关注
58文章
4889浏览量
90338
发布评论请先 登录
自动驾驶要不要跳过L3?华为和小鹏给出了相反的答案

L4级自动驾驶提速,制造链可以提前做哪些升级?

L3自动驾驶落地,线控底盘带飞国产车规芯片供应链
汽车行业迎来L3级自动驾驶上路潮!华为、小鹏、理想抢跑

自动驾驶汽车如何确定自己的位置和所在车道?

NVIDIA与Uber合作推进全球L4级自动驾驶移动出行网络
批准L3级自动驾驶上路意味着什么?


行深智能推出基于地平线征程6M的L4级自动驾驶解决方案
自动驾驶汽车如何正确进行道路识别?




评论