 聚类分析经典算法讲解及实现
聚类分析经典算法讲解及实现

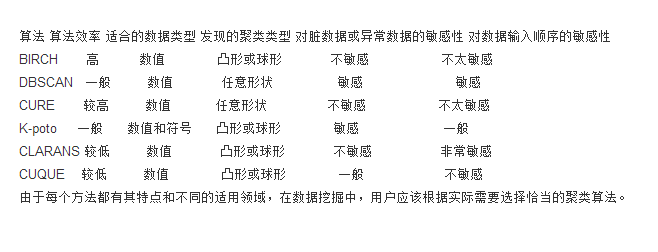
常用聚类算法比较分析
K-pototypes算法
K-pototypes算法结合了K-means方法和根据K-means方法改进的能够处理符号属性的K-modes方法,同K-means方法相比,K-pototypes 算法能够处理符号属性。
CLARANS算法(划分方法)
CLARANS算法即随机搜索聚类算法,是一种分割聚类方法。它首先随机选择一个点作为当前点,然后随机检查它周围不超过参数Maxneighbor 个的一些邻接点,假如找到一个比它更好的邻接点,则把它移人该邻接点,否则把该点作为局部最小量。然后再随机选择一个点来寻找另一个局部最小量,直至所找 到的局部最小量数目达到用户要求为止。该算法要求聚类的对象必须都预先调人内存,并且需多次扫描数据集,这对大数据量而言,无论时间复杂度还是空间复杂度 都相当大。虽通过引人R-树结构对其性能进行改善,使之能够处理基于磁盘的大型数据库,但R*-树的构造和维护代价太大。该算法对脏数据和异常数据不敏 感,但对数据物人顺序异常敏感,且只能处理凸形或球形边界聚类。
BIRCH算法(层次方法)
BIRCH算法即平衡迭代削减聚类法,其核心是用一个聚类特征3元组表示一个簇的有关信息,从而使一簇点的表示可用对应的聚类特征,而不必用具体的一 组点来表示。它通过构造满足分支因子和簇直径限制的聚类特征树来求聚类。BIRCH算法通过聚类特征可以方便地进行中心、半径、直径及类内、类间距离的运 算。算法的聚类特征树是一个具有两个参数分枝因子B和类直径T的高度平衡树。分枝因子规定了树的每个节点子女的最多个数,而类直径体现了对一类点的直径大 小的限制即这些点在多大范围内可以聚为一类,非叶子结点为它的子女的最大关键字,可以根据这些关键字进行插人索引,它总结了其子女的信息。
聚类特征树可以动态构造,因此不要求所有数据读人内存,而可以在外存上逐个读人。新的数据项总是插人到树中与该数据距离最近的叶子中。如果插人后使得 该叶子的直径大于类直径T,则把该叶子节点分裂。其它叶子结点也需要检查是否超过分枝因子来判断其分裂与否,直至该数据插入到叶子中,并且满足不超过类直 径,而每个非叶子节点的子女个数不大于分枝因子。算法还可以通过改变类直径修改特征树大小,控制其占内存容量。
BIRCH算法通过一次扫描就可以进行较好的聚类,由此可见,该算法适合于大数据量。对于给定的M兆内存空间,其空间复杂度为O(M),时间间复杂度 为O(dNBlnB(M/P))。其中d为维数,N为节点数,P为内存页的大小,B为由P决定的分枝因子。I/O花费与数据量成线性关系。BIRCH算法 只适用于类的分布呈凸形及球形的情况,并且由于BIRCH算法需提供正确的聚类个数和簇直径限制,对不可视的高维数据不可行。
CURE算法(层次方法)
CURE算法即使用代表点的聚类方法。该算法先把每个数据点看成一类,然后合并距离最近的类直至类个数为所要求的个数为止。CURE算法将传统对类的 表示方法进行了改进,回避了用所有点或用中心和半径来表示一个类,而是从每一个类中抽取固定数量、分布较好的点作为描述此类的代表点,并将这些点乘以一个 适当的收缩因子,使它们更靠近类的中心点。将一个类用代表点表示,使得类的外延可以向非球形的形状扩展,从而可调整类的形状以表达那些非球形的类。另外, 收缩因子的使用减小了嗓音对聚类的影响。CURE算法采用随机抽样与分割相结合的办法来提高算法的空间和时间效率,并且在算法中用了堆和K-d树结构来提 高算法效率。
DBSCAN算法(基于密度的方法)
DBSCAN算法即基于密度的聚类算法。该算法利用类的密度连通性可以快速发现任意形状的类。其基本思想是:对于一个类中的每个对象,在其给定半径的 领域中包含的对象不能少于某一给定的最小数目。在DBSCAN算法中,发现一个类的过程是基于这样的事实:一个类能够被其中的任意一个核心对象所确定。为 了发现一个类,DBSCAN先从对象集D中找到任意一对象P,并查找D中关于关径Eps和最小对象数Minpts的从P密度可达的所有对象。如果P是核心 对象,即半径为Eps的P的邻域中包含的对象不少于Minpts,则根据算法,可以找到一个关于参数Eps和Minpts的类。如果P是一个边界点,则半 径为Eps的P邻域包含的对象少于Minpts,P被暂时标注为噪声点。然后,DBSCAN处理D中的下一个对象。
密度可达对象的获取是通过不断执行区域查询来实现的。一个区域查询返回指定区域中的所有对象。为了有效地执行区域查询,DBSCAN算法使用了空间查 询R-树结构。在进行聚类前,必须建立针对所有数据的R*-树。另外,DBSCAN要求用户指定一个全局参数Eps(为了减少计算量,预先确定参数 Minpts)。为了确定取值,DBSCAN计算任意对象与它的第k个最临近的对象之间的距离。然后,根据求得的距离由小到大排序,并绘出排序后的图,称 做k-dist图。k-dist图中的横坐标表示数据对象与它的第k个最近的对象间的距离;纵坐标为对应于某一k-dist距离值的数据对象的个数。 R*-树的建立和k-dist图的绘制非常消耗时间。此外,为了得到较好的聚类结果,用户必须根据k-dist图,通过试探选定一个比较合适的Eps值。 DBSCAN算法不进行任何的预处理而直接对整个数据集进行聚类操作。当数据量非常大时,就必须有大内存量支持,I/O消耗也非常大。其时间复杂度为 O(nlogn)(n为数据量),聚类过程的大部分时间用在区域查询操作上。DBSCAN算法对参数Eps及Minpts非常敏感,且这两个参数很难确定。
CLIQUE算法(综合了基于密度和基于网格的算法)
CLIQUE算法即自动子空间聚类算法。该算法利用自顶向上方法求出各个子空间的聚类单元。CLUQUE算法主要用于找出在高维数据空间中存在的低维 聚类。为了求出d维空间聚类,必须组合给出所有d-1维子空间的聚类,导致其算法的空间和时间效率都较低,而且要求用户输入两个参数:数据取值空间等间隔 距离和密度阔值。这2个参数与样木数据紧密相关,用户一般难以确定。CLIQUE算法对数据输人顺序不敏感。
基于上述分析,我们得到各聚类算法的比较结果,结论如下:
K 均值算法详解及实现
算法流程
K 均值算法,应该是聚类算法中最为基础但也最为重要的算法。其算法流程如下:
随机的取 k 个点作为 k 个初始质心;
计算其他点到这个 k 个质心的距离;
如果某个点 p 离第 n 个质心的距离更近,则该点属于 cluster n,并对其打标签,标注 point p.label=n,其中 n《=k;
计算同一 cluster 中,也就是相同 label 的点向量的平均值,作为新的质心;
迭代至所有质心都不变化为止,即算法结束。
当然算法实现的方法有很多,比如在选择初始质心时,可以随机选择 k 个,也可以随机选择 k 个离得最远的点等等,方法不尽相同。
K 值估计
对于 k 值,必须提前知道,这也是 kmeans 算法的一个缺点。当然对于 k 值,我们可以有很多种方法进行估计。本文中,我们采用平均直径法来进行 k 的估计。
也就是说,首先视所有的点为一个大的整体 cluster,计算所有点之间距离的平均值作为该 cluster 的平均直径。选择初始质心的时候,先选择最远的两个点,接下来从这最两个点开始,与这最两个点距离都很远的点(远的程度为,该点到之前选择的最远的两个点的距离都大于整体 cluster 的平均直径)可视为新发现的质心,否则不视之为质心。设想一下,如果利用平均半径或平均直径这一个指标,若我们猜想的 K 值大于或等于真实的 K 值,也就是簇的真实数目,那么该指标的上升趋势会很缓慢,但是如果我们给出的 K 值小于真实的簇的数目时,这个指标一定会急剧上升。
根据这样的估算思想,我们就能估计出正确的 k 值,并且得到 k 个初始质心,接着,我们便根据上述算法流程继续进行迭代,直到所有质心都不变化,从而成功实现算法。如下图所示:
图 1. K 值估计
我们知道 k 均值总是收敛的,也就是说,k 均值算法一定会达到一种稳定状态,在此状态下,所有的点都不会从一个簇转移到另一个簇,因此质心不在发生改变。在此,我们引出一个剪枝优化,即:k 均值最明显的收敛过程会发生在算法运行的前期阶段,故在某些情况下为了增加算法的执行效率,我们可以替换上述算法的第五步,采用“迭代至仅有 1%~3%的点在影响质心”或“迭代至仅有 1%~3%的点在改变簇”。
k 均值适用于绝大多数的数据类型,并且简单有效。但其缺点就是需要知道准确的 k 值,并且不能处理异形簇,比如球形簇,不同尺寸及密度的簇,环形簇等等。
本文主要为算法讲解及实现,因此代码实现暂不考虑面向对象思想,采用面向过程的实现方式,如果数据多维,可能会需要做数据预处理,比如归一化,并且修改代码相关方法即可。
算法实现
清单 1. Kmeans 算法代码实现
import java.io.BufferedReader;
import java.io.FileReader;
import java.io.IOException;
import java.io.PrintStream;
import java.text.DecimalFormat;
import java.util.ArrayList;
import java.util.Comparator;
import java.util.PriorityQueue;
import java.util.Queue;
public class Kmeans {
private class Node {
int label;// label 用来记录点属于第几个 cluster
double[] attributes;
public Node() {
attributes = new double[100];
}
}
private class NodeComparator {
Node nodeOne;
Node nodeTwo;
double distance;
public void compute() {
double val = 0;
for (int i = 0; i 《 dimension; ++i) {
val += (this.nodeOne.attributes[i] - this.nodeTwo.attributes[i]) *
(this.nodeOne.attributes[i] - this.nodeTwo.attributes[i]);
}
this.distance = val;
}
}
private ArrayList《Node》 arraylist;
private ArrayList《Node》 centroidList;
private double averageDis;
private int dimension;
private Queue《NodeComparator》 FsQueue =
new PriorityQueue《NodeComparator》(150, // 用来排序任意两点之间的距离,从大到小排
new Comparator《NodeComparator》() {
public int compare(NodeComparator one, NodeComparator two) {
if (one.distance 《 two.distance)
return 1;
else if (one.distance 》 two.distance)
return -1;
else
return 0;
}
});
public void setKmeansInput(String path) {
try {
BufferedReader br = new BufferedReader(new FileReader(path));
String str;
String[] strArray;
arraylist = new ArrayList《Node》();
while ((str = br.readLine()) != null) {
strArray = str.split(“,”);
dimension = strArray.length;
Node node = new Node();
for (int i = 0; i 《 dimension; ++i) {
node.attributes[i] = Double.parseDouble(strArray[i]);
}
arraylist.add(node);
}
br.close();
} catch (IOException e) {
e.printStackTrace();
}
}
public void computeTheK() {
int cntTuple = 0;
for (int i = 0; i 《 arraylist.size() - 1; ++i) {
for (int j = i + 1; j 《 arraylist.size(); ++j) {
NodeComparator nodecomp = new NodeComparator();
nodecomp.nodeOne = new Node();
nodecomp.nodeTwo = new Node();
for (int k = 0; k 《 dimension; ++k) {
nodecomp.nodeOne.attributes[k] = arraylist.get(i).attributes[k];
nodecomp.nodeTwo.attributes[k] = arraylist.get(j).attributes[k];
}
nodecomp.compute();
averageDis += nodecomp.distance;
FsQueue.add(nodecomp);
cntTuple++;
}
}
averageDis /= cntTuple;// 计算平均距离
chooseCentroid(FsQueue);
}
public double getDistance(Node one, Node two) {// 计算两点间的欧氏距离
double val = 0;
for (int i = 0; i 《 dimension; ++i) {
val += (one.attributes[i] - two.attributes[i]) * (one.attributes[i] - two.attributes[i]);
}
return val;
}
public void chooseCentroid(Queue《NodeComparator》 queue) {
centroidList = new ArrayList《Node》();
boolean flag = false;
while (!queue.isEmpty()) {
boolean judgeOne = false;
boolean judgeTwo = false;
NodeComparator nc = FsQueue.poll();
if (nc.distance 《 averageDis)
break;// 如果接下来的元组,两节点间距离小于平均距离,则不继续迭代
if (!flag) {
centroidList.add(nc.nodeOne);// 先加入所有点中距离最远的两个点
centroidList.add(nc.nodeTwo);
flag = true;
} else {// 之后从之前已加入的最远的两个点开始,找离这两个点最远的点,
// 如果距离大于所有点的平均距离,则认为找到了新的质心,否则不认定为质心
for (int i = 0; i 《 centroidList.size(); ++i) {
Node testnode = centroidList.get(i);
if (centroidList.contains(nc.nodeOne) || getDistance(testnode, nc.nodeOne) 《 averageDis) {
judgeOne = true;
}
if (centroidList.contains(nc.nodeTwo) || getDistance(testnode, nc.nodeTwo) 《 averageDis) {
judgeTwo = true;
}
}
if (!judgeOne) {
centroidList.add(nc.nodeOne);
}
if (!judgeTwo) {
centroidList.add(nc.nodeTwo);
}
}
}
}
public void doIteration(ArrayList《Node》 centroid) {
int cnt = 1;
int cntEnd = 0;
int numLabel = centroid.size();
while (true) {// 迭代,直到所有的质心都不变化为止
boolean flag = false;
for (int i = 0; i 《 arraylist.size(); ++i) {
double dis = 0x7fffffff;
cnt = 1;
for (int j = 0; j 《 centroid.size(); ++j) {
Node node = centroid.get(j);
if (getDistance(arraylist.get(i), node) 《 dis) {
dis = getDistance(arraylist.get(i), node);
arraylist.get(i).label = cnt;
}
cnt++;
}
}
int j = 0;
numLabel -= 1;
while (j 《 numLabel) {
int c = 0;
Node node = new Node();
for (int i = 0; i 《 arraylist.size(); ++i) {
if (arraylist.get(i).label == j + 1) {
for (int k = 0; k 《 dimension; ++k) {
node.attributes[k] += arraylist.get(i).attributes[k];
}
c++;
}
}
DecimalFormat df = new DecimalFormat(“#.###”);// 保留小数点后三位
double[] attributelist = new double[100];
for (int i = 0; i 《 dimension; ++i) {
attributelist[i] = Double.parseDouble(df.format(node.attributes[i] / c));
if (attributelist[i] != centroid.get(j).attributes[i]) {
centroid.get(j).attributes[i] = attributelist[i];
flag = true;
}
}
if (!flag) {
cntEnd++;
if (cntEnd == numLabel) {// 若所有的质心都不变,则跳出循环
break;
}
}
j++;
}
if (cntEnd == numLabel) {// 若所有的质心都不变,则 success
System.out.println(“run kmeans successfully.”);
break;
}
}
}
public void printKmeansResults(String path) {
try {
PrintStream out = new PrintStream(path);
computeTheK();
doIteration(centroidList);
out.println(“There are ” + centroidList.size() + “ clusters!”);
for (int i = 0; i 《 arraylist.size(); ++i) {
out.print(“(”);
for (int j = 0; j 《 dimension - 1; ++j) {
out.print(arraylist.get(i).attributes[j] + “, ”);
}
out.print(arraylist.get(i).attributes[dimension - 1] + “) ”);
out.println(“belongs to cluster ” + arraylist.get(i).label);
}
out.close();
System.out.println(“Please check results in: ” + path);
} catch (IOException e) {
e.printStackTrace();
}
}
public static void main(String[] args) {
Kmeans kmeans = new Kmeans();
kmeans.setKmeansInput(“c:/kmeans.txt”);
kmeans.printKmeansResults(“c:/kmeansResults.txt”);
}
}
测试数据
给出一组简单的二维测试数据:
清单 2. Kmeans 算法测试数据
1,1
2,1
1,2
2,2
6,1
6,2
7,1
7,2
1,5
1,6
2,5
2,6
6,5
6,6
7,5
7,6
运行结果
清单 3. Kmeans 算法运行结果
There are 4 clusters!
(1.0, 1.0) belongs to cluster 1
(2.0, 1.0) belongs to cluster 1
(1.0, 2.0) belongs to cluster 1
(2.0, 2.0) belongs to cluster 1
(6.0, 1.0) belongs to cluster 3
(6.0, 2.0) belongs to cluster 3
(7.0, 1.0) belongs to cluster 3
(7.0, 2.0) belongs to cluster 3
(1.0, 5.0) belongs to cluster 4
(1.0, 6.0) belongs to cluster 4
(2.0, 5.0) belongs to cluster 4
(2.0, 6.0) belongs to cluster 4
(6.0, 5.0) belongs to cluster 2
(6.0, 6.0) belongs to cluster 2
(7.0, 5.0) belongs to cluster 2
(7.0, 6.0) belongs to cluster 2
层次聚类算法详解及实现
层次聚类简介
层次聚类分为凝聚式层次聚类和分裂式层次聚类。
凝聚式层次聚类,就是在初始阶段将每一个点都视为一个簇,之后每一次合并两个最接近的簇,当然对于接近程度的定义则需要指定簇的邻近准则。
分裂式层次聚类,就是在初始阶段将所有的点视为一个簇,之后每次分裂出一个簇,直到最后剩下单个点的簇为止。
本文中我们将详细介绍凝聚式层次聚类算法。
对于凝聚式层次聚类,指定簇的邻近准则是非常重要的一个环节,在此我们介绍三种最常用的准则,分别是 MAX, MIN, 组平均。如下图所示:
图 2. 层次聚类计算准则
凝聚式层次聚类算法也是一个迭代的过程,算法流程如下:
每次选最近的两个簇合并,我们将这两个合并后的簇称之为合并簇。
若采用 MAX 准则,选择其他簇与合并簇中离得最远的两个点之间的距离作为簇之间的邻近度。若采用 MIN 准则,取其他簇与合并簇中离得最近的两个点之间的距离作为簇之间的邻近度。若组平均准则,取其他簇与合并簇所有点之间距离的平均值作为簇之间的邻近度。
重复步骤 1 和步骤 2,合并至只剩下一个簇。
算法过程举例
下面我们看一个例子:
下图是一个有五个点的而为坐标系:
图 3. 层次聚类举例
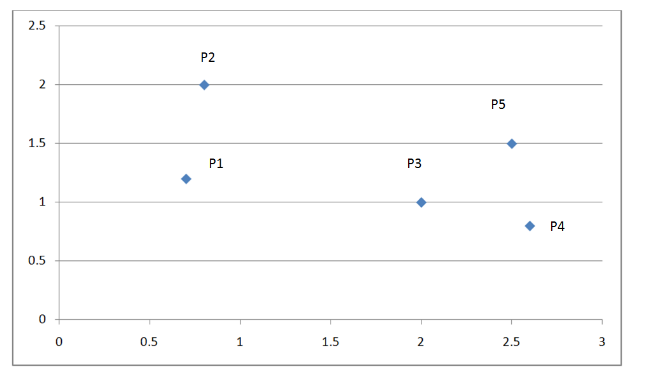
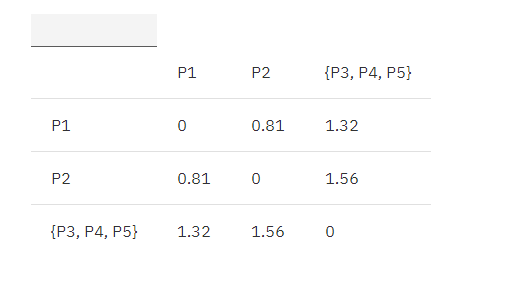
下表为这五个点的欧式距离矩阵:
表 1. 欧式距离原始矩阵
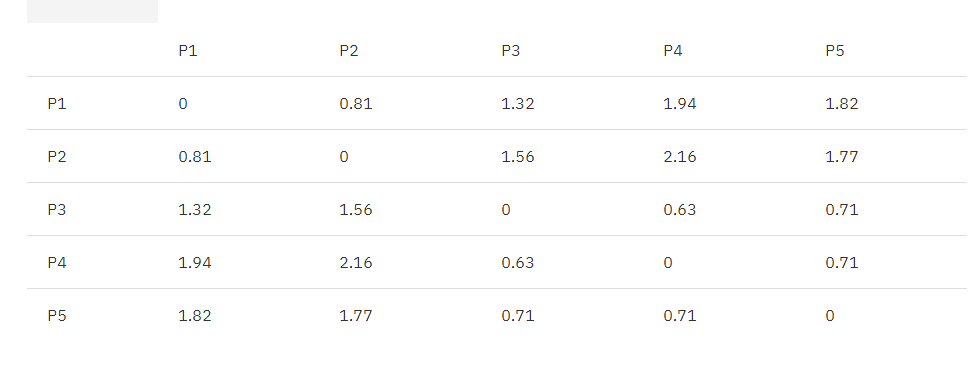
根据算法流程,我们先找出距离最近的两个簇,P3, P4。
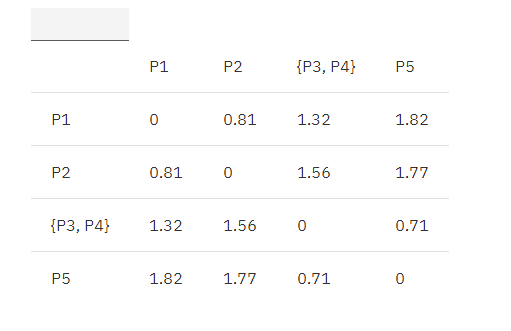
合并 P3, P4 为 {P3, P4},根据 MIN 原则更新矩阵如下:
MIN.distance({P3, P4}, P1) = 1.32;
MIN.distance({P3, P4}, P2) = 1.56;
MIN.distance({P3, P4}, P5) = 0.70;
表 2. 欧式距离更新矩阵 1
接着继续找出距离最近的两个簇,{P3, P4}, P5。
合并 {P3, P4}, P5 为 {P3, P4, P5},根据 MIN 原则继续更新矩阵:
MIN.distance(P1, {P3, P4, P5}) = 1.32;
MIN.distance(P2, {P3, P4, P5}) = 1.56;
表 3. 欧式距离更新矩阵 2
接着继续找出距离最近的两个簇,P1, P2。
合并 P1, P2 为 {P1, P2},根据 MIN 原则继续更新矩阵:
MIN.distance({P1,P2}, {P3, P4, P5}) = 1.32
表 4. 欧式距离更新矩阵 3
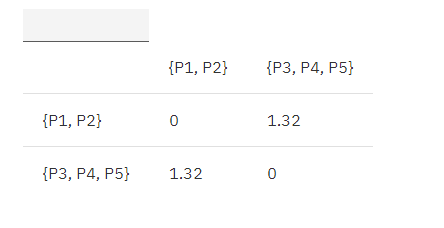
最终合并剩下的这两个簇即可获得最终结果,如下图:
图 4. 层次聚类举例结果
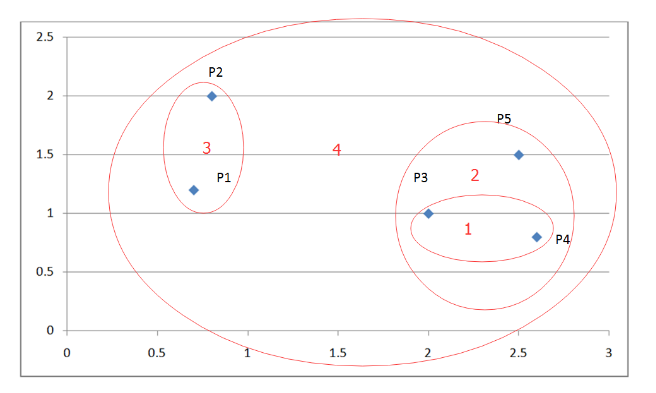
MAX,组平均算法流程同理,只是在更新矩阵时将上述计算簇间距离变为簇间两点最大欧式距离,和簇间所有点平均欧式距离即可。
算法实现
清单 4. 层次聚类算法代码实现
import java.io.BufferedReader;
import java.io.FileReader;
import java.io.IOException;
import java.io.PrintStream;
import java.text.DecimalFormat;
import java.util.ArrayList;
public class Hierarchical {
private double[][] matrix;
private int dimension;// 数据维度
private class Node {
double[] attributes;
public Node() {
attributes = new double[100];
}
}
private ArrayList《Node》 arraylist;
private class Model {
int x = 0;
int y = 0;
double value = 0;
}
private Model minModel = new Model();
private double getDistance(Node one, Node two) {// 计算两点间的欧氏距离
double val = 0;
for (int i = 0; i 《 dimension; ++i) {
val += (one.attributes[i] - two.attributes[i]) * (one.attributes[i] - two.attributes[i]);
}
return Math.sqrt(val);
}
private void loadMatrix() {// 将输入数据转化为矩阵
for (int i = 0; i 《 matrix.length; ++i) {
for (int j = i + 1; j 《 matrix.length; ++j) {
double distance = getDistance(arraylist.get(i), arraylist.get(j));
matrix[i][j] = distance;
}
}
}
private Model findMinValueOfMatrix(double[][] matrix) {// 找出矩阵中距离最近的两个簇
Model model = new Model();
double min = 0x7fffffff;
for (int i = 0; i 《 matrix.length; ++i) {
for (int j = i + 1; j 《 matrix.length; ++j) {
if (min 》 matrix[i][j] && matrix[i][j] != 0) {
min = matrix[i][j];
model.x = i;
model.y = j;
model.value = matrix[i][j];
}
}
}
return model;
}
private void processHierarchical(String path) {
try {
PrintStream out = new PrintStream(path);
while (true) {// 凝聚层次聚类迭代
out.println(“Matrix update as below: ”);
for (int i = 0; i 《 matrix.length; ++i) {// 输出每次迭代更新的矩阵
for (int j = 0; j 《 matrix.length - 1; ++j) {
out.print(new DecimalFormat(“#.00”).format(matrix[i][j]) + “ ”);
}
out.println(new DecimalFormat(“#.00”).format(matrix[i][matrix.length - 1]));
}
out.println();
minModel = findMinValueOfMatrix(matrix);
if (minModel.value == 0) {// 当找不出距离最近的两个簇时,迭代结束
break;
}
out.println(“Combine ” + (minModel.x + 1) + “ ” + (minModel.y + 1));
out.println(“The distance is: ” + minModel.value);
matrix[minModel.x][minModel.y] = 0;// 更新矩阵
for (int i = 0; i 《 matrix.length; ++i) {// 如果合并了点 p1 与 p2,则只保留 p1,p2 其中之一与其他点的距离,取较小值
if (matrix[i][minModel.x] 《= matrix[i][minModel.y]) {
matrix[i][minModel.y] = 0;
} else {
matrix[i][minModel.x] = 0;
}
if (matrix[minModel.x][i] 《= matrix[minModel.y][i]) {
matrix[minModel.y][i] = 0;
} else {
matrix[minModel.x][i] = 0;
}
}
}
out.close();
System.out.println(“Please check results in: ” + path);
} catch (Exception e) {
e.printStackTrace();
}
}
public void setInput(String path) {
try {
BufferedReader br = new BufferedReader(new FileReader(path));
String str;
String[] strArray;
arraylist = new ArrayList《Node》();
while ((str = br.readLine()) != null) {
strArray = str.split(“,”);
dimension = strArray.length;
Node node = new Node();
for (int i = 0; i 《 dimension; ++i) {
node.attributes[i] = Double.parseDouble(strArray[i]);
}
arraylist.add(node);
}
matrix = new double[arraylist.size()][arraylist.size()];
loadMatrix();
br.close();
} catch (IOException e) {
e.printStackTrace();
}
}
public void printOutput(String path) {
processHierarchical(path);
}
public static void main(String[] args) {
Hierarchical hi = new Hierarchical();
hi.setInput(“c:/hierarchical.txt”);
hi.printOutput(“c:/hierarchical_results.txt”);
}
}
测试数据
给出一组简单的二维测试数据
清单 5. 层次聚类算法测试数据
0.7,1.2
0.8,2
2,1
2.6,0.8
2.5,1.5
运行结果
清单 6. 层次聚类算法运行结果
Matrix update as below:
.00 .81 1.32 1.94 1.82
.00 .00 1.56 2.16 1.77
.00 .00 .00 .63 .71
.00 .00 .00 .00 .71
.00 .00 .00 .00 .00
Combine 3 4
The distance is: 0.6324555320336759
Matrix update as below:
.00 .81 1.32 .00 1.82
.00 .00 1.56 .00 1.77
.00 .00 .00 .00 .00
.00 .00 .00 .00 .71
.00 .00 .00 .00 .00
Combine 4 5
The distance is: 0.7071067811865475
Matrix update as below:
.00 .81 1.32 .00 .00
.00 .00 1.56 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
Combine 1 2
The distance is: 0.806225774829855
Matrix update as below:
.00 .00 1.32 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
Combine 1 3
The distance is: 1.3152946437965907
Matrix update as below:
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
.00 .00 .00 .00 .00
DBSCAN 算法详解及实现
考虑一种情况,点的分布不均匀,形状不规则时,Kmeans 算法及层次聚类算法将面临失效的风险。
如下坐标系:
图 5. DBSCAN 算法举例
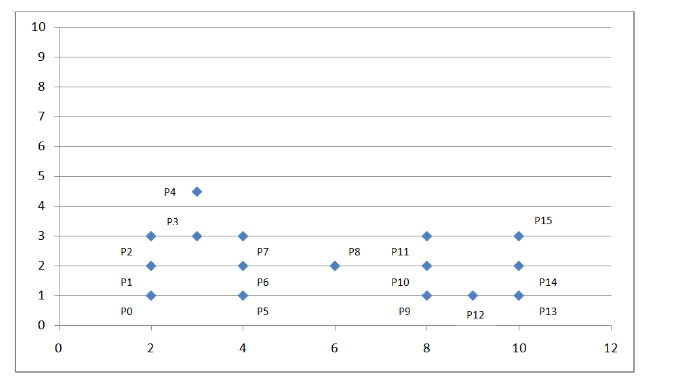
我们可以看到上面的点密度不均匀,这时我们考虑采用基于密度的聚类算法:DBSCAN。
算法流程
设定扫描半径 Eps, 并规定扫描半径内的密度值。若当前点的半径范围内密度大于等于设定密度值,则设置当前点为核心点;若某点刚好在某核心点的半径边缘上,则设定此点为边界点;若某点既不是核心点又不是边界点,则此点为噪声点。
删除噪声点。
将距离在扫描半径内的所有核心点赋予边进行连通。
每组连通的核心点标记为一个簇。
将所有边界点指定到与之对应的核心点的簇总。
算法过程举例
如上图坐标系所示,我们设定扫描半径 Eps 为 1.5,密度阈值 threshold 为 3,则通过上述算法过程,我们可以得到下图:
图 6. DBSCAN 算法举例结果示例
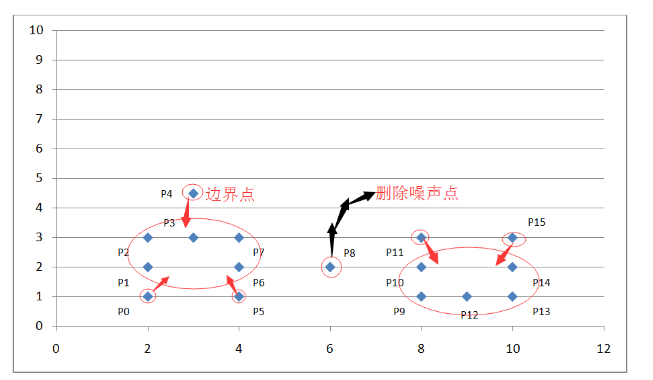
通过计算各个点之间的欧式距离及其所在扫描半径内的密度值来判断这些点属于核心点,边界点或是噪声点。因为我们设定了扫描半径为 1.5,密度阈值为 3,所以:
P0 点为边界点,因为在以其为中心的扫描半径内只有两个点 P0 和 P1;
P1 点为核心点,因为在以其为中心的扫描半径内有四个点 P0,P1,P2,P4 ;
P8 为噪声点,因为其既非核心点,也非边界点;
其他点依次类推。
算法实现
清单 7. DBSCAN 算法代码实现
import java.io.BufferedReader;
import java.io.FileReader;
import java.io.IOException;
import java.io.PrintStream;
import java.util.ArrayList;
import java.util.HashMap;
import java.util.Iterator;
import java.util.Map;
public class DBSCAN {
private int dimension;// 数据维度
private double eps = 1.5;
private int threshold = 3;
private double distance[][];
private Map《Integer, Integer》 id = new HashMap《Integer, Integer》();
private int countClusters = 0;
private ArrayList《Integer》 keyPointList = new ArrayList《Integer》();//
private int[] flags;// 标记边缘点
private class Edge {
int p, q;
double weight;
}
private class Node {
double[] attributes;
public Node() {
attributes = new double[100];
}
}
private ArrayList《Node》 nodeList;
private ArrayList《Edge》 edgeList;
private double getDistance(Node one, Node two) {// 计算两点间的欧氏距离
double val = 0;
for (int i = 0; i 《 dimension; ++i) {
val += (one.attributes[i] - two.attributes[i]) * (one.attributes[i] - two.attributes[i]);
}
return Math.sqrt(val);
}
public void loadEdges() {// 给所有在扫描半径内的核心点之间加边,标记边界点并且自动忽略噪声点
edgeList = new ArrayList《Edge》();
flags = new int[nodeList.size()];
int[] countPoint = new int[nodeList.size()];
for (int i = 0; i 《 countPoint.length; ++i) {
countPoint[i] = 1;// 每一个点一开始都是核心点
}
for (int i = 0; i 《 nodeList.size(); ++i) {
for (int j = i + 1; j 《 nodeList.size(); ++j) {
distance[i][j] = getDistance(nodeList.get(i), nodeList.get(j));
if (distance[i][j] 《= eps) {// 两点间距离小于扫描半径
countPoint[i]++;
if (countPoint[i] 》 0 && countPoint[i] 《 threshold) {
flags[i] = j;// 记录边界点
}
if (countPoint[i] 》= threshold) {// 如果记录当前点的扫描半径内密度值大于或等于给定阈值
flags[i] = 0;
if (!keyPointList.contains(i)) {
keyPointList.add(i);
}
}
countPoint[j]++;
if (countPoint[j] 》 0 && countPoint[j] 《 threshold) {
flags[j] = i;// 记录边界点
}
if (countPoint[j] 》= threshold) {// 如果记录当前点的扫描半径内密度值大于或等于给定阈值
flags[j] = 0;
if (!keyPointList.contains(j)) {
keyPointList.add(j);
}
}
}
}
}
for (int i = 0; i 《 keyPointList.size(); ++i) {
for (int j = i + 1; j 《 keyPointList.size(); ++j) {
Edge edge = new Edge();
edge.p = keyPointList.get(i);
edge.q = keyPointList.get(j);
edge.weight = distance[edge.p][edge.q];
if (edge.weight 《= eps) {
if (!id.containsKey(edge.p)) {// 为后期使用并查集求连通分量做准备
id.put(edge.p, edge.p);
}
if (!id.containsKey(edge.q)) {
id.put(edge.q, edge.q);
}
edgeList.add(edge);
}
}
}
}
public void setInput(String path) {
try {
BufferedReader br = new BufferedReader(new FileReader(path));
String str;
String[] strArray;
nodeList = new ArrayList《Node》();
while ((str = br.readLine()) != null) {
strArray = str.split(“,”);
dimension = strArray.length;
Node node = new Node();
for (int i = 0; i 《 dimension; ++i) {
node.attributes[i] = Double.parseDouble(strArray[i]);
}
nodeList.add(node);
}
distance = new double[nodeList.size()][nodeList.size()];
loadEdges();
br.close();
} catch (IOException e) {
e.printStackTrace();
}
}
public void union(int p, int q) {// 并操作
int a = find(p);
int b = find(q);
if (a != b) {
id.put(a, b);
}
}
public int find(int p) {// 查操作
if (p != id.get(p)) {
id.put(p, find(id.get(p)));
}
return id.get(p);
}
public void processDBSCAN(String path) {
try {
PrintStream out = new PrintStream(path);
out.println(“核心点为: ” + keyPointList);
out.println();
for (int i = 0; i 《 edgeList.size(); ++i) {
out.println(“核心点 (” + edgeList.get(i).p + “ ” +
edgeList.get(i).q + “) 之间的距离为: ” + edgeList.get(i).weight);
}
for (int i = 0; i 《 edgeList.size(); ++i) {
union(edgeList.get(i).p, edgeList.get(i).q);// 利用并查集将点集变为连通分量
}
Iterator《Integer》 it = id.keySet().iterator();
while (it.hasNext()) {
int key = it.next();
if (id.get(key) == key) {// 利用并查集得到强连通分量个数
++countClusters;
}
}
out.println();
for (int i = 0; i 《 flags.length; ++i) {
if (flags[i] != 0) {
out.println(“点” + i + “属于点” + flags[i] + “所在的簇”);
}
}
out.println();
out.println(“由核心点连通分量数量得知共有: ” + countClusters + “个簇”);
out.close();
System.out.println(“Please check results in: ” + path);
} catch (Exception e) {
e.printStackTrace();
}
}
public void printOutput(String path) {
processDBSCAN(path);
}
public static void main(String[] args) {
DBSCAN dbscan = new DBSCAN();
dbscan.setInput(“c:/dbscan.txt”);
dbscan.printOutput(“c:/dbscan_results.txt”);
}
}
测试数据
清单 8. DBSCAN 算法测试数据
2,1
2,2
2,3
3,3
3,4.5
4,1
4,2
4,3
6,2
8,1
8,2
8,3
9,1
10,1
10,2
10,3
运行结果
清单 9. DBSCAN 算法运行结果
核心点为: [1, 2, 3, 6, 7, 9, 10, 12, 13, 14]
核心点 (1 2) 之间的距离为: 1.0
核心点 (1 3) 之间的距离为: 1.4142135623730951
核心点 (2 3) 之间的距离为: 1.0
核心点 (3 6) 之间的距离为: 1.4142135623730951
核心点 (3 7) 之间的距离为: 1.0
核心点 (6 7) 之间的距离为: 1.0
核心点 (9 10) 之间的距离为: 1.0
核心点 (9 12) 之间的距离为: 1.0
核心点 (10 12) 之间的距离为: 1.4142135623730951
核心点 (12 13) 之间的距离为: 1.0
核心点 (12 14) 之间的距离为: 1.4142135623730951
核心点 (13 14) 之间的距离为: 1.0
连通点 1 和点 2
连通点 1 和点 3
连通点 3 和点 6
连通点 3 和点 7
连通点 9 和点 10
连通点 9 和点 12
连通点 12 和点 13
连通点 12 和点 14
点 1、点 2、点 3、点 6、点 7 同属于簇 1
点 9、点 10、点 12、点 13、点 14 同属于簇 2
点 0 属于点 1 所在的簇
点 4 属于点 3 所在的簇
点 5 属于点 6 所在的簇
点 11 属于点 10 所在的簇
点 15 属于点 14 所在的簇
由核心点连通分量数量得知共有: 2 个簇
其他聚类算法简介
BIRCH 算法
Birch 是一种能够高效处理大数据聚类的基于树的层次聚类算法。设想这样一种情况,一个拥有大规模数据的数据库,当这些数据被放入主存进行聚类处理时,一般的聚类算法则没有对应的高效处理能力,这时 Birch 算法是最佳的选择。
Birth 不仅能够高效地处理大数据聚类,并且能最小化 IO 花销。它不需要扫描全局数据已经现有的簇。
算法流程
聚类特征 CF=(N,LS,SS),其中 N 代表簇中点的个数,LS 代表簇中代表簇中各点线性和,SS 代表簇中各点的平方和距离。聚类特征被应用于 CF 树中,CF 树是一种高度平衡树,它具有两个参数:平衡因子 B 和簇半径阈值 T。其中平衡因子 B 代表每一个非叶子节点最多能够引入 B 个实体条目。
叶子节点最多只能包含 L 个实体条目,并且它们具有前向后向指针,这样可以彼此链接起来。
树的大小取决于簇半径阈值 T 的大小。
从根节点开始,递归查找与要插入的数据点距离最近的叶子节点中的实体条目,递归过程选择最短路径。
比较上述计算出的数据点与叶子节点中实体条目间的最近距离是否小叶簇半径阈值 T,小于则吸收该数据点。否则执行下一步。
判断当前条目所在的叶节点个数是否小于 L,若小于则直接将该数据点插入当前点。否则分裂叶子节点,分裂过程是将叶子节点中距离最远的两个实体条目变为新的两个叶子节点,其他条目则根据距离最近原则重新分配到这两个新的叶子节点中。删除原来的叶子节点并更新 CF 树。
若不能将所有数据点加入 CF 树中,则考虑增加簇半径阈值 T,并重新更新 CF 树直至所有的数据点被加入 CF 树为止。
CURE 算法
算法流程
在数据集中选择样本数据。
将上述样本数据划分为 P 个同样大小的划分。
将每个划分中的点聚成 m/pq 个簇,共得到 m/q 个簇。过程中需删除噪声点。
对上述 m/q 个簇进行聚类直至剩下 k 个簇。
继续删除离群点。
将剩下的点指派到最近的簇完成聚类过程。
聚类算法是数据挖掘算法中最为重要的部分之一,算法种类繁多,应用场景也各有不同,本文章提到的聚类算法为常见常用的一些较为基本的算法,对于其他的聚类算法,如最小生成树聚类,CLIQUE,DENCLUE,SOM 等等如有兴趣,读者可以自行查找相关资料进行学习。本文旨在提高读者对算法本身的理解,代码实现过程及结果打印能够更好的帮助读者剖析算法,使读者能够更快的入门并掌握基本的聚类算法。
-
聚类分析
+关注
关注
0文章
16浏览量
7595
发布评论请先 登录

星座图聚类分析的QAM信号调制识别算法及DSP实现
基于GT4的聚类分析算法研究
基于Hadoop与聚类分析的网络日志分析模型




评论