 阿里首次出现在自动驾驶计算机视觉算法集KITTI道路场景分割排行榜上
阿里首次出现在自动驾驶计算机视觉算法集KITTI道路场景分割排行榜上

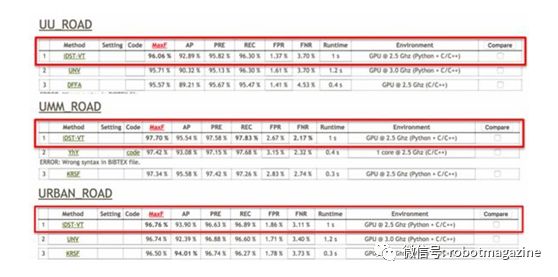
近日,阿里巴巴首次出现在自动驾驶计算机视觉算法集KITTI道路场景分割排行榜上。
榜单显示,阿里人工智能团队iDST获得三项分割任务第一,包括UU_ROAD(乡村车道)与UMM_ROAD(多车道)两项特定场景任务,及整体场景的综合评测任务URBAN_ROAD(城市车道)。
据悉,KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是国际公认的最大自动驾驶计算机算法评测数据集。KITTI数据集涵盖城市、住宅区、道路、校园、行人等五大场景,采用更适合自动驾驶的BEV(Bird’sEye View,鸟瞰)视角评价方式,包含众多难度较大的无标识线道路。
阿里获三项分割任务第一
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
人工智能
+关注
关注
1819文章
50298浏览量
266844 -
计算机视觉
+关注
关注
9文章
1715浏览量
47711 -
自动驾驶
+关注
关注
794文章
14979浏览量
181397 -
阿里
+关注
关注
6文章
467浏览量
34236
原文标题:阿里视觉算法获三项分割任务第一
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么光照对纯视觉自动驾驶影响较大?
在自动驾驶的技术路线中,纯视觉方案因其模仿人类驾驶逻辑与低廉的硬件成本,一直是很多车企的选择。但这种高度依赖摄像头的感知方式,在夜幕降临、车辆驶入幽暗的隧道,或是遭遇强烈的逆光直射、漫天的雨雪浓雾时,感知能力会发生断崖式下跌。为
自动驾驶端到端为什么会出现黑盒现象?
在自动驾驶领域,端到端(End-to-End)是指从感知环境的原始数据到车辆实际控制指令,全部交给一个统一的深度学习模型来完成。这和传统的模块化自动驾驶系统不一样,模块化自动驾驶系统会先识别道

纯视觉自动驾驶能识别出高透明玻璃墙吗?
,还是想申明下,在常规驾驶场景下,车辆前方出现高透明玻璃墙的可能性微乎其微,若遇到真的属于罕见的边缘场景了,今天聊的内容仅从技术方向上分析下纯视觉

纯视觉自动驾驶的优势和劣势有哪些?
[首发于智驾最前沿微信公众号]最近有很多小伙伴在后台询问纯视觉自动驾驶的优劣,纯视觉自动驾驶以其低成本、高冗余的技术路径,正成为自动驾驶现阶

纯视觉自动驾驶会像人眼一样“近视”吗?
[首发于智驾最前沿微信公众号]在自动驾驶领域,纯视觉路线逐渐获得了一部分从业者和研究者的认可与支持。随着双目乃至三目摄像头方案的应用,通过视差计算、结构约束和算法建模,摄像头已经具备了

SimData:基于aiSim的高保真虚拟数据集生成方案
01前言在自动驾驶感知系统的研发过程中,模型的性能高度依赖于大规模、高质量的感知数据集。目前业界常用的数据集包括KITTI、nuScenes、WaymoOpenDataset等,它们为

塑造自动驾驶汽车格局的核心技术
自动驾驶汽车长期以来一直是科幻小说中的情节,但在如今的2025年,它似乎已经离我们越来越近,智能辅助驾驶已经出现在越来越多的新能源汽车中。但距离完全的自动驾驶仍有需要克服的工程挑战。
低速和高速自动驾驶的应用场景和技术方向有何不同?
[首发于智驾最前沿微信公众号]在很多交流场景中,当我说到自动驾驶技术的应用还不成熟,现在只能达到L2级时,就会有些小伙伴提到快递、外卖小车的应用,他们认为这些小车已经不需要驾驶员
自动化计算机的功能与用途
工业自动化是指利用自动化计算机来控制工业环境中的流程、机器人和机械,以制造产品或其部件。工业自动化的目的是提高生产率、增加灵活性,并提升制造过程的质量。工业

低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?
到我们生活的方方面面。与面向开放道路、高速巡航的乘用车自动驾驶系统相比,低速小车在技术实现、系统架构、硬件配置、软件算法及安全冗余等方面都存在显著差异和针对性优化。 从感知需求方面相比,低速小车的行驶环境通常

自动驾驶汽车如何正确进行道路识别?
[首发于智驾最前沿微信公众号]自动驾驶汽车在行驶过程中必须准确识别道路环境,以便做出安全有效的决策,不同于人类开车,可以思考,自动驾驶汽车对于道路的识别需要更多的技术辅助。对于

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?
,自动驾驶技术也得到了充足的应用,但因应用场景不同,技术的侧重方向也有所区别。今天就来和大家聊一聊这个话题。 应用场景:开放道路vs封闭场地 首先要理解的是,

纯视觉的自动驾驶会有哪些安全问题?
强调视觉系统的先进性。纯视觉自动驾驶是指在车辆自动驾驶系统中仅依赖摄像头而不使用激光雷达或毫米波雷达等主动传感器。特斯拉率先倡导这一路线,宣称模拟人类

自动驾驶安全基石:ODD
电子发烧友网综合报道 自动驾驶ODD(Operational Design Domain)即设计运行域,是指自动驾驶系统被设计为安全、有效运行的具体条件范围。它定义了自动驾驶汽车在哪些环境、场
新能源车软件单元测试深度解析:自动驾驶系统视角
。
自动驾驶软件的特殊性
感知层: 激光雷达、摄像头等传感器数据处理算法的单元测试需覆盖极端场景。例如,激光雷达点云滤波算法在雨雪天气下的噪声抑制能力需通过边界测试验证。某
发表于 05-12 15:59



评论