 自动停车机器人,如何快速构建?
自动停车机器人,如何快速构建?

停车机器人是用于在停车场或车库等场所中进行车辆的自动停放和取车操作。随着智能交通和智能城市的发展,停车机器人在解决停车难、提高停车效率和减少停车空间浪费等方面具有广阔的应用前景。

▲停车移动机器人现场作业
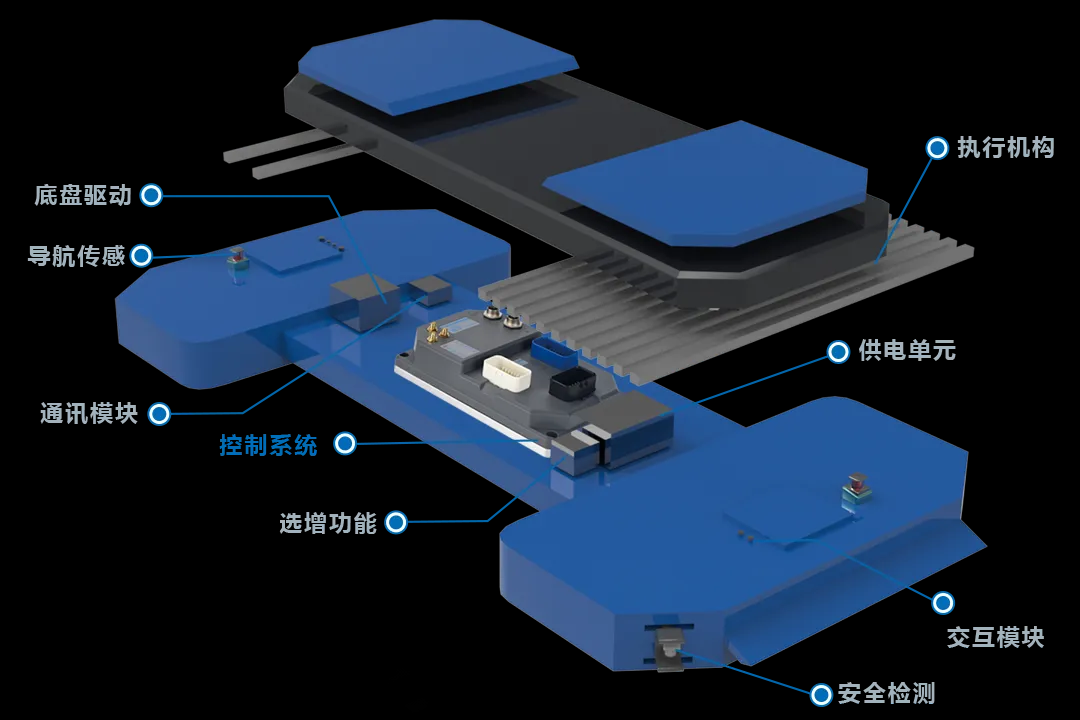
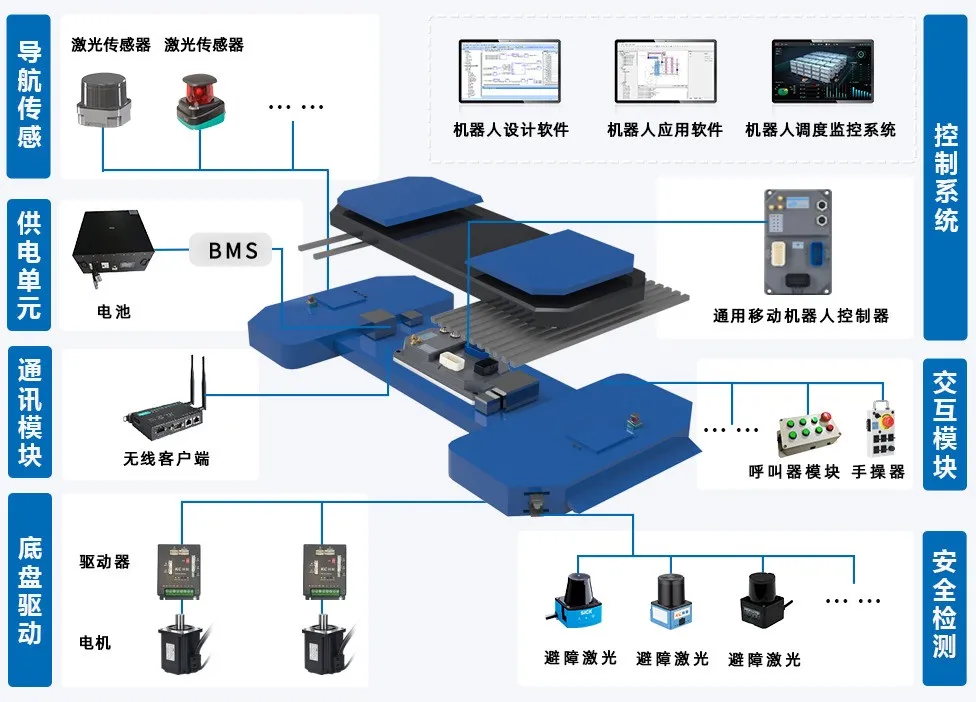
▲停车移动机器人构成
科聪停车机器人
解决方案 -KC SOLUTION
本方案中核心部分采用的是科聪通用移动机器人控制器,导航方式一般选择激光导航,用以实现行驶路径可灵活多变和高精度导航的需求。以通用移动机器人控制器为核心的整体解决方案已在停车机器人领域广泛使用。
方案优势
ADVANTAGE
体积紧凑
停车移动机器人相对普通移动机器人车型设计较薄,这对控制器的设计和安装尺寸提出了更高的要求。科聪控制器设计紧凑,可方便安装于任意款停车机器人。
高精度控制
停车机器人需具备高精度的停放,不可出现车辆剐蹭问题。在机器人本体精度支持下,科聪系列控制系统的精度可达到±5mm以内,确保停车准确无误。
支持可拓展
可根据用户需求进行功能定制,方便应对各类复杂场景,赋能停车机器人更具竞争力。
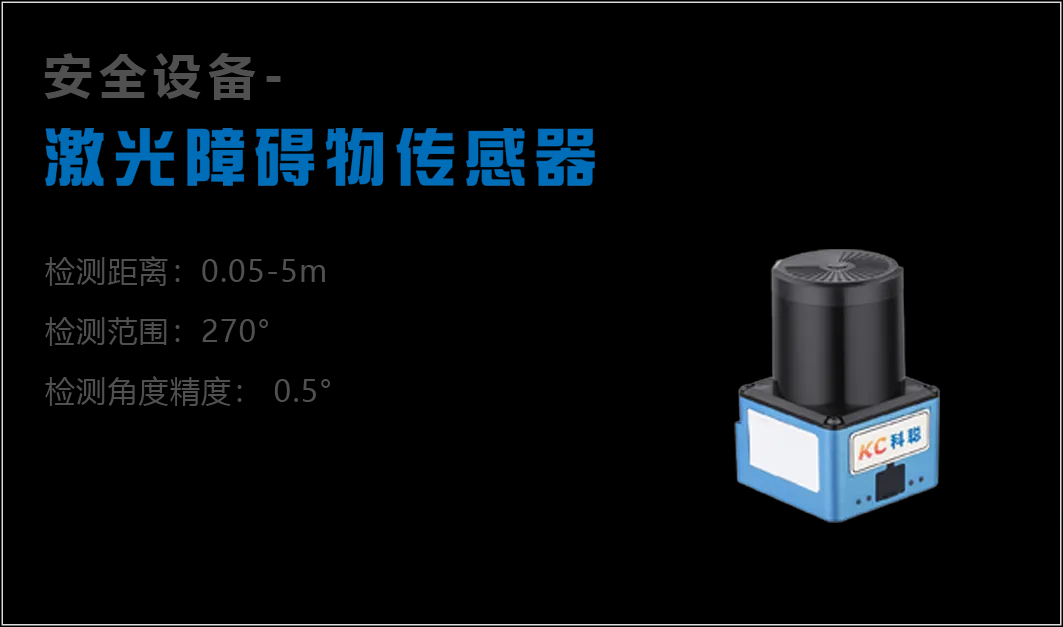
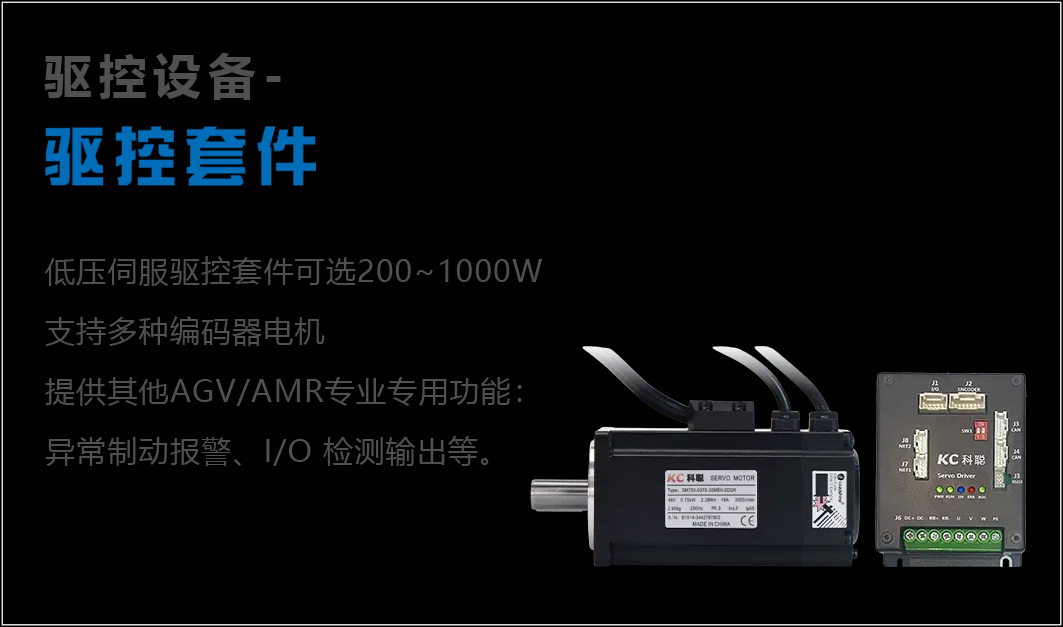
方案产品
SOLUTION PRODUCTS


审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31646浏览量
224545
发布评论请先 登录
相关推荐
热点推荐
基于米尔RK3576核心板的国产割草机器人解决方案
。
国产算法兼容 :支持与国内SLAM方案商(如科沃斯、追觅等生态伙伴)的算法快速适配,缩短产品落地周期。
3. 执行层:实时控制与丰富接口
割草机器人的底盘运动控制需要极低且确定性的延迟。RK3576
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
。有了扭矩传感器,机器人能实时检测力的大小和方向,自动调整姿态。例如,在人形机器人的腿部关节,传感器以1千赫兹的频率感知地面反作用力,瞬间调整输出扭矩,实现稳定行走和上下斜坡。2. 安全协作:碰撞即停
发表于 04-17 17:27
Neway电机方案在机器人技术方面的优势
Neway电机方案在机器人技术方面的优势Neway电机方案在机器人技术方面展现出显著优势,其通过全国产器件替代、高功率密度设计、多重保护功能、宽温工作能力以及快速交付与供应链稳定性等核心特性,精准
发表于 03-30 09:39
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
未来》和《立上游》:**MagicBot Z1/Gen1+MagicDog 四足,集群伴舞、多机协同,主打快速响应+低延迟+高集成。
**松延动力:《奶奶的最爱》:**E1/N2/Bumi+仿生机器人
发表于 02-17 14:07
探索RISC-V在机器人领域的潜力
探索RISC-V在机器人领域的潜力
测评人:洄溯
测评时间: 2025年11月
测评对象: MUSE Pi Pro开发板(基于进迭时空K1系列高性能RISC-V CPU)
一、 开篇引言
发表于 12-03 14:40
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
校正方案,实时补偿位置偏差与温度漂移,显著提升轨迹规划精度与重复定位精度。
4. 模块化系统集成方案
MYD-LT536 提供完整SDK、Linux 驱动与开发文档,可快速构建机器人系统集成
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
模拟输入数据自动调整整个系统的动态平衡,使得机器人最终能够快速且平滑地沿着黑线移动。除此之外,该项目最大的亮点是我根据GD32VF103处理器的库函数手册等相关资料为RV-STAR开发板封装了一个类
发表于 10-20 10:39
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 KTH71 系列磁传感器芯片,通过检测地磁场与运动磁场变化
发表于 08-26 10:02
NVIDIA助力构建人形机器人全身遥操作仿真平台
清华大学与银河通用机器人联合研发,推出了专为人形机器人全身仿真遥操作设计的平台 OpenWBT_Isaac。该平台依托 NVIDIA Isaac Sim 与 Isaac Lab 的强大仿真能力构建
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。
发表于 07-26 11:22
工业机器人与协作机器人概念不同
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉淀,为不同需求的企业提供适配的

明远智睿SSD2351开发板:语音机器人领域的变革力量
在人工智能快速发展的今天,语音机器人逐渐成为人们生活和工作中的得力助手。明远智睿SSD2351开发板凭借强大性能与丰富功能,为语音机器人的发展注入新动力,成为该领域的变革力量。 SSD2351开发板
发表于 05-28 11:36



评论