 基于机器人操作的微流控片上检测方法,提高现场即时诊断的准确性
基于机器人操作的微流控片上检测方法,提高现场即时诊断的准确性

标准诊断方法由于依赖于医疗实验室的基础设施和专业人员,以及耗时的方案、高昂的人工成本和昂贵的设备等局限性而无法满足要求。相比之下,即时诊断(POCT)方法利用简化的仪器和样本到答案的程序,可在医疗机构之外进行定性诊断。这种简化的模式加上及时的响应,使POCT易于采用和广泛传播。然而,这些方法往往需要在检测复杂性和检测可靠性之间进行权衡,因此不足以作为独立的诊断工具。开发无需人工操作即可处理标准检测的分散式、可实地部署的实验室,可提高全球检测能力,从而为公共安全提供更具成本效益、更方便用户的医疗保健服务。
近期,中国科学技术大学潘挺睿教授课题组报道了一种可以使用机器人进行操作的微流控片上检测方法,能够实现多色酶联免疫吸附测定(ELISA)。相关成果以“Multicolor-Assay-on-a-ChipProcessed by Robotic Operation (MAC-pro) with Improved Diagnostic Accuracy forField-deployable Detection”为题发表在国际化学权威杂志AnalyticalChemistry上,并被遴选为当期补充期刊封面。
通过利用这种基于机器人进行操作处理的芯片上多色免疫测定(MACpro)方法,该研究可以满足部署具有自主和可靠疾病诊断能力的分散实验室的需求。MACpro平台由机器人-微流控界面和手眼模块组成,可提供灵活而稳定的操作,以可编程的方式执行任务,如沿不同路径精确操作微流控芯片。以干扰素-γ为例,MACpro的检测灵敏度和检测范围相比于传统方法提高了一个数量级。
MACpro平台集成了手眼(EIH)校准功能,通过映射和重建整个平台上目标的实际坐标,对机器人末端效应器进行操作和运动校正。EIH耦合机器人-微流控界面提供了可编程的操作,以执行多种任务,如机械搬运(如微流控芯片的取放)和高稳定性的流体操作。在微流控芯片的反应腔中,装入抗体结合微珠可提高抗体固定能力,而抗体的固定能力是影响检测结果的关键参数。此外,MACpro利用AuNRs和蚀刻剂产生信号,取代了传统ELISA中使用的常规酶(如辣根过氧化物酶)和底物,可根据不同浓度的分析物显示不同的颜色。Cu²⁺作为催化剂可将蚀刻速度提高约3倍(<20分钟),从而提高检测效率。
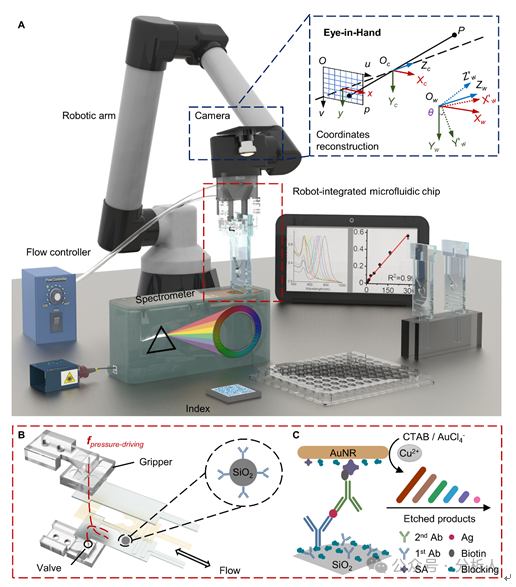
MACpro平台示意图
该研究开发的MACpro平台通过机械臂的三维移动、末端效应器对微流控芯片的取放等程序进行工作。在抓取和夹紧微流控芯片后,末端效应器将通过气动互连与芯片啮合。末端不对齐会导致气动压力出现重大误差,影响后续的液体处理过程。通过设置了手眼校准方法,可以定位芯片的空间坐标,同时校正末端效应器的位置,实现机器人与微流控接口的自动分组。

MACpro平台的功能说明
针对微流控芯片室在干扰素-γ(IFN-γ)浓度为0至600pg/mL时的检测结果,数码照片可以清晰地显示出从红棕色到黄色的渐变色。在45 pg/mL IFN-γ以上,λmax从1100 nm变为600 nm。λmax与IFN-γ浓度的校准曲线是通过逻辑拟合绘制的(R²=0.998)。在较低的浓度范围(0-35 pg/mL),只能在525 nm处测得吸收强度不同的单峰。因此,研究人员用逻辑拟合法绘制了二级校准曲线(R²=0.992)。与标准ELISA相比,检测灵敏度和动态检测范围均提高10倍。
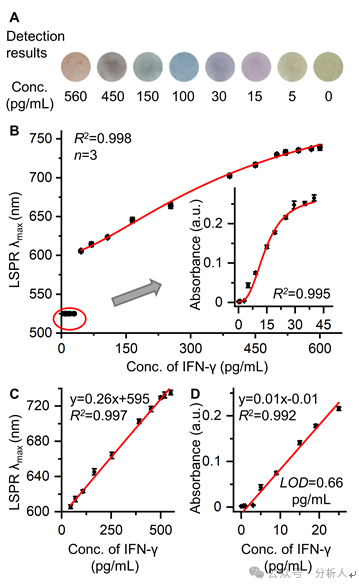
MACpro多色酶联免疫吸附试验的检测结果
综上所述,研究人员开发了基于机器人集成微流控芯片与等离子体生物传感器的MACpro平台。MACpro可自动执行涉及标准ELISA的多项任务,如通过手眼校准拾取和放置微流控芯片、高精度进出液处理以及通过光谱仪集成进行比色测量。抗体结合微珠和AuNRs生物传感器的等离子刻蚀技术的应用,有助于提高检测灵敏度和动态范围。得益于MACpro平台的模块化配置和工作流程的可编程自动化,所介绍的方法有利于现场和实地部署检测,并可灵活地用于检测诊所和远程环境中的各种目标。
论文链接: https://doi.org/10.1021/acs.analchem.3c05918
-
机器人
+关注
关注
213文章
31494浏览量
223867 -
微流控芯片
+关注
关注
13文章
311浏览量
20098 -
生物传感器
+关注
关注
12文章
404浏览量
38646
原文标题:基于机器人操作的微流控片上检测方法,提高现场即时诊断的准确性
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
基于米尔RK3576核心板的国产割草机器人解决方案
机器人用霍尔电流传感器,能提升操作安全性么?

确保X光设备检测的有效性和准确性的关键技巧
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
自制巡线解迷宫机器人(上)
如何降低环境干扰强度对谐波检测设备准确性的影响?
测缝计测量数据的准确性和校准方法解析

手表外壳气密性检测仪:如何有效提升检测效率与准确性
借助NVIDIA技术实现机器人装配和接触密集型操作



评论