 小型商用机器人,如何做到小而强呢?
小型商用机器人,如何做到小而强呢?

体型和性能的矛盾
一直以来,商用清洁机器人的应用场景主要集中在大型商场、超市、写字楼等,为什么1000平米以下的小型商超等中小场景却很少涉足?原因可以说有很多,但核心为两方面,一方面,机器人成本过高,小型商超无法承受;另一方面,机器人体型难以适配。
不过在市场规模增长整体放缓的压力下,寻找新的增长点成为了厂商们的迫切任务,能够适配中小场景的小型化商用机器人开始被重视,能够看到,市面上已经出现了一批中小型产品,如科沃斯程犀清洁机器人、海尔B3清洁机器人等,只是整体数量仍然较少。
1000平米以下的中小场景不同于大型场景,它们对于机器人有着更苛刻的要求,在兼顾体型和性能的同时,还要对正常运营影响小,这意味着在设计机器人时,不仅要考虑机械本体的尺寸质量,使得机器人足够小巧,能够自由穿梭狭小区域,还要保证功能实现的前提下,尽量减少软硬件的成本,也因此导致产品研发难度较大。
作为行业机器人技术供应商,INDEMIND一直关注中小型机器人赛道,面对行业难题,针对性推出了中小型机器人解决方案「商用机器人AI Kit Lite」。该方案基于成熟的「商用机器人AI Kit」,加入了全新的轻量化模型,对于硬件空间体积需求大大缩小,适用于10-50kg级的各种中小型机器人。
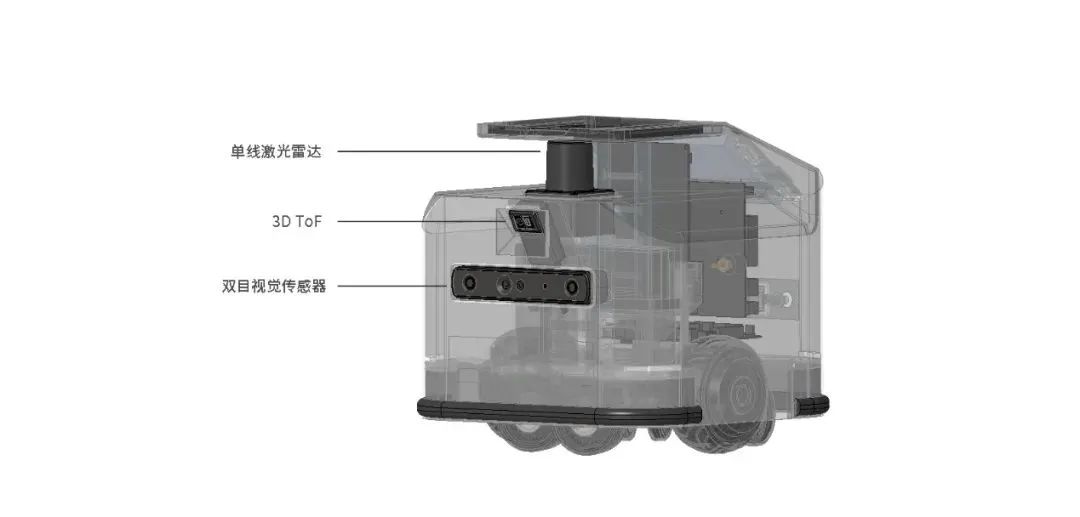
「商用机器人AI Kit Lite」仍然采用以双目立体相机为核心的多传感器融合技术,支持接入市面上不同品类的主流传感器,能够适应各种室内外环境,满足机器人导航定位、智能避障、路径规划、决策交互等多种必备功能的实现,功能表现完全不输于中大型商用机器人。
在产品架构上,「商用机器人AI Kit Lite」采用设备端系统+云端系统架构,分别在设备端提供了包含导航AI算法、导航计算平台、双目惯性感知传感器、系统驱动MCU、电源管理、人机交互系统和在云端提供了包含业务管理、状态监控、调度管理、地图管理等各种软硬件服务,做到了一站式解决机器人的开发需求。
体型缩水,性能增加
智能建图,实时适应环境
「商用机器人AI Kit Lite」具备智能建图功能,支持全场景二维地图、三维地图及语义地图自主创建,支持地图动态更新,显著提升机器人的场景适应能力;同时无需提前录制地图,建图精度可达厘米级,单张最大支持60000㎡,并支持多张地图存储。
需要提到的是,INDEMIND拥有超过100个使用场景的海量数据,对于清洁、配送、导览、安防等多种工作场景有着深度理解,能进一步提升机器人的环境自适应能力。
智能识别,环境信息尽收“眼”底
支持识别人、动物及各种场景语义识别,对于商用场景中常见的玻璃门(包括玻璃转门)、玻璃护栏、自动扶梯等及家用场景中的常用家具和生活用品均能有效识别检测。
无需预部署,开机即用
由于激光导航技术的限制,大多数商用机器人和小型商用机器人,在正式使用前均需要工程师进行现场部署,往往会花费一定时间和成本。而搭载「商用机器人AI Kit Lite」的机器人颠覆性的做到了无需预部署,开机即用。基于独有的立体视觉技术,机器人能够实时自主构建地图,做到新机器、新场景无需预部署,开机即用,且变更场景后,机器人也能自主更新地图,无需技术人员参与,大大降低使用成本,这与现有的机器人产品有着天然的区别。
智能避障,赋予机器人精准“闪避”能力
「商用机器人AI Kit Lite」具备系统化的安全决策系统,支持智能避障和主动安全功能。机器人能够稳定检测各类障碍物,支持低矮障碍物避障(地插、桌椅底座等);高反障碍物避障(玻璃、镜面等);全高障碍物避障(桌面、警戒线等),保障机器人在复杂环境下安全运行。
技术成本更低,降低整机成本
基于以视觉传感器为核心的融合导航方案,在成本也具有天然优势,相较于激光融合导航方案能够下降60-80%,从而降低机器人的整机成本。
此外,搭载「商用机器人AI Kit Lite」和「商用机器人AI Kit」的机器人,可以形成“大+小”协同作业机制,基于INDEMIND机器人协作开放平台,能够让任何符合标准的机器人设备实现与平台下其他机器人进行多机通信,以保证在同一环境下安全高效的协同工作,避免干扰以及事故风险。同时在作业方面,支持位置信息共享、自主调度、协调作业等。
审核编辑:刘清
-
传感器
+关注
关注
2574文章
54382浏览量
786130 -
人机交互
+关注
关注
12文章
1275浏览量
57639 -
机器人
+关注
关注
213文章
30590浏览量
219616 -
电源管理
+关注
关注
117文章
6549浏览量
147538 -
AI算法
+关注
关注
0文章
270浏览量
13056
原文标题:小型商用机器人,如何做到小而强?
文章出处:【微信号:gh_c87a2bc99401,微信公众号:INDEMIND】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
工业机器人的特点
科沃斯商用清洁机器人入驻MFG集团总部
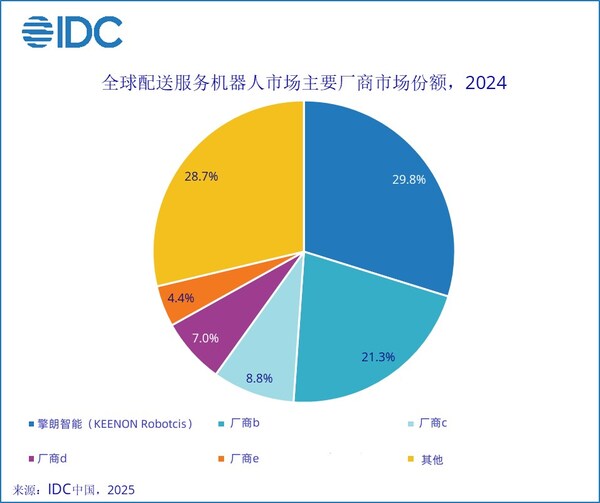
IDC:擎朗智能全球商用服务机器人第一,持续领跑全球





 工商网监
工商网监
评论