 stm32 I2c硬件驱动程序不稳定该怎么解决?
stm32 I2c硬件驱动程序不稳定该怎么解决?

stm32 I2c硬件驱动程序不稳定该怎么解决?
stm32 的 I2C 硬件驱动程序不稳定可能是由多种因素引起的。在本文中,我们将讨论可能导致 I2C 不稳定的几个常见问题,并提供解决方案。
1. 硬件问题:
a. 电源问题:I2C 总线需要稳定的电源供应。如果电源波动较大,会导致通信错误。解决方法是检查电源供应,并确保其稳定。
b. 物理连接问题:I2C 总线需要正确的物理连接,包括正确的电路布局、正确的线缆选择以及正确的电缆长度等。检查这些连接是否正确,并采取适当的措施进行修复。
c. 电气特性不匹配:I2C 设备之间的电气特性需要一致,包括电压电平以及上拉电阻值等。检查设备之间的电气特性是否匹配,并进行适当的调整。
2. 软件问题:
a. 时钟配置问题:I2C 总线需要正确的时钟配置才能正常工作。确保正确设置时钟源、时钟频率以及正确的分频器设置等。
b. 中断处理问题:I2C 硬件驱动程序通常使用中断来处理数据传输。如果中断配置不正确,或者中断处理程序中有错误,可能会导致 I2C 不稳定。检查中断配置,并确保中断处理程序正确地处理了数据传输。
c. 软件延时问题:I2C 总线上的一些操作需要一定的延时来完成,如等待数据传输完成等。如果延时时间设置不正确,可能会导致 I2C 不稳定。确保正确设置延时时间,并进行必要的调整。
3. 内部错误处理问题:
a. 错误处理:I2C 硬件驱动程序通常提供错误处理机制来处理通信中的错误。确保正确地处理和记录任何错误,并采取适当的措施进行纠正。
b. 超时处理:I2C 数据传输可能会出现超时的情况,如设备未响应等。确保设置了适当的超时时间,并进行相应的错误处理。
4. 信号干扰问题:
a. 外部信号干扰:I2C 通信可能受到来自其他电路或外部设备的干扰。检查周围环境,并采取适当的屏蔽措施来减少信号干扰。
b. 母线长度问题:I2C 总线的长度对通信的稳定性有影响。检查总线的长度,并根据总线长度适当地设置电缆等。
5. 软硬件匹配问题:
a. 设备兼容性问题:确保使用的 STM32 芯片和 I2C 设备是兼容的。查阅它们的规格书,并确保它们能够正常工作。
总结:以上是一些常见问题和解决方案,希望能够帮助您解决 stm32 I2C 硬件驱动程序不稳定的问题。但是请注意,每个问题的具体原因和解决方案可能会因情况而异。因此,我们建议您首先仔细分析问题,并使用适当的调试工具和方法进行调试。
-
STM32
+关注
关注
2315文章
11223浏览量
375718 -
I2C
+关注
关注
28文章
1570浏览量
132200
发布评论请先 登录
驱动之路#43:一文理清I2C子系统架构

驱动之路#42:I2C协议与SMBus协议是什么关系?

驱动之路#40:I2C通信机制分析(RK3576视角)

s332k358 控制器并尝试与 I2c 总线上的从站通信 是否有使用 MCAL驱动程序进行I2C同步传输和异步传输的示例项目
基于 RT-Thread 的软 I2C:比你想象的更简单

如何在 Yocto 中集成由 HID 设备控制的 I2C 触摸驱动程序?
RK平台I2C开发:从硬件原理到实战排查

基于FPGA的I2C控制模块设计

CW32的I2C是否好用?照比ST的来说?
基于CW32 MCU的I2C接口优化稳定读写EEPROM关键技术
深入剖析I2C协议

高效率、6通道、白光LED驱动器,带I2C接口 skyworksinc

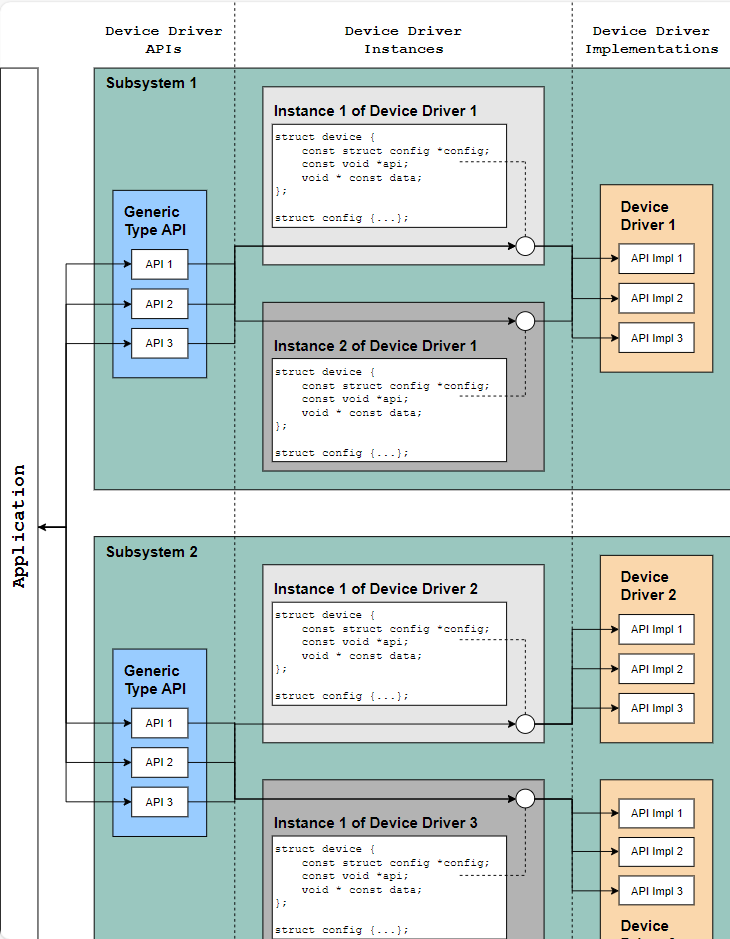
zephyr设备驱动程序模型



评论