 串联型PI控制器和并联型PI控制器的比较
串联型PI控制器和并联型PI控制器的比较

在工业控制系统中,控制器是实现对被控对象进行调节和控制的重要设备。其中,比例积分(PI)控制器是一种常用的控制器,其作用是通过比例环节和积分环节对误差信号进行处理,以实现对被控对象的精确控制。根据比例环节和积分环节的连接方式不同,PI控制器可以分为串联型PI控制器和并联型PI控制器两种类型。本文将对这两种类型的PI控制器进行比较分析。
串联型PI控制器
串联型PI控制器是指将比例环节和积分环节串联在一起,即误差信号先经过比例环节处理后再经过积分环节处理。
串联型PI控制器的特点是:
1.比例环节和积分环节的输出相加后作为控制器的输出。因此,串联型PI控制器的输出与误差信号的大小成正比,与误差信号的变化速度成反比。
2.串联型PI控制器的比例增益和积分增益可以独立调节,因此可以根据实际需要进行调整。
3.串联型PI控制器的响应速度较快,但存在超调现象。当误差信号较大时,控制器的输出会迅速增大,导致被控对象的响应速度过快,甚至出现超调现象。
并联型PI控制器
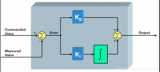
并联型PI控制器是指将比例环节和积分环节并联在一起,即误差信号同时经过比例环节和积分环节处理。
并联型PI控制器的特点是:
1.比例环节和积分环节的输出相加后作为控制器的输出。因此,并联型PI控制器的输出与误差信号的大小成正比,与误差信号的变化速度成反比。
2.并联型PI控制器的比例增益和积分增益可以独立调节,因此可以根据实际需要进行调整。
3.并联型PI控制器的响应速度较慢,但不存在超调现象。由于比例环节和积分环节同时作用于误差信号,因此控制器的输出不会迅速增大,避免了被控对象的响应速度过快和超调现象的发生。
三、串联型PI控制器和并联型PI控制器的比较
1.响应速度:串联型PI控制器的响应速度较快,而并联型PI控制器的响应速度较慢。这是因为串联型PI控制器的比例环节和积分环节是串行连接的,误差信号的处理时间较短;而并联型PI控制器的比例环节和积分环节是并行连接的,误差信号的处理时间较长。
2.超调现象:串联型PI控制器存在超调现象,而并联型PI控制器不存在超调现象。这是因为串联型PI控制器的比例增益较大时,会导致控制器的输出迅速增大,从而引起被控对象的响应速度过快和超调现象的发生;而并联型PI控制器的比例增益较小时,可以避免这种情况的发生。
3.稳定性:串联型PI控制器的稳定性较差,而并联型PI控制器的稳定性较好。这是因为串联型PI控制器的比例增益和积分增益是独立的,当比例增益过大或积分增益过小时,容易引起系统不稳定;而并联型PI控制器的比例增益和积分增益是相互影响的,可以更好地保证系统的稳定性。
4.参数调整:串联型PI控制器的比例增益和积分增益可以独立调节,而并联型PI控制器的比例增益和积分增益也可以独立调节。但是,由于串联型PI控制器存在超调现象,因此在实际应用中需要对比例增益进行限制;而并联型PI控制器不存在超调现象,因此可以更加灵活地调整比例增益和积分增益。
综上所述,串联型PI控制器和并联型PI控制器各有优缺点。在实际应用中,应根据被控对象的特性和控制要求选择合适的类型。如果需要快速响应和较大的控制精度,可以选择串联型PI控制器;如果需要稳定的控制性能和较小的超调量,可以选择并联型PI控制器。此外,还可以通过合理的参数调整和优化设计来进一步提高控制性能。
-
工业控制
+关注
关注
38文章
1705浏览量
92336 -
PI控制器
+关注
关注
1文章
25浏览量
11918
发布评论请先 登录
请问什么是“循环”PI 控制器?
求助!!全桥电压型逆变器的双环PI控制波形畸变的原因
什么时候使用PI和PD控制器
基于Smith预估的FNNC-PI复合控制器研究
PI—FUZZY模糊控制器的设计及应用
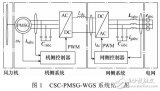
基于解析计算的CSC-PMSG-WGS控制器PI参数设计




评论