 激光雷达在特殊场景中使用的小细节
激光雷达在特殊场景中使用的小细节

激光雷达是20世纪60年代首次提出的一项技术,随着应用的广泛,在过去的几年里,激光雷达经历了一轮新的繁荣进步和多行业使用,已迅速成为自动驾驶、无人机巡查、工业自动化等领域的关键技术。
截至目前,明治传感已推出了好几款激光雷达AS系列产品,涵盖避障型、导航型以及导航避障一体型;具有测量精度高、扫描速度快、抗干扰能力强、体积小、重量轻、可靠性高等优势,是工业AGV、移动机器人、低速机器人的理想选择。
每一种传感器基于各自的性能特点,都有其适合的应用场景。在实际特殊环境应用中,激光雷达也有着一些使用小技巧。本期小明就来分享一下激光雷达在实际应用中的那些小细节~
激光雷达是基于时间飞行(TOF)工作原理;激光雷达发射激光脉冲,并测量此脉冲经被测目标表面反射后返回的时间,然后换算成距离数据
发射光和接受光时间差为t,
c为光速,则雷达与目标的距离为
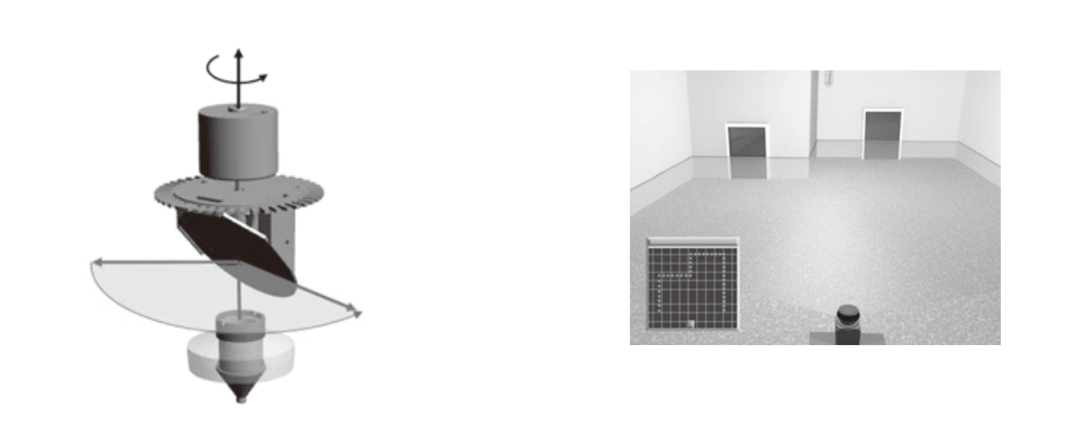
雷达通过一个反射镜对测距激光脉冲进行反射。当反射镜被电机带动旋转时,从而形成一个与旋转轴垂直的扫描平面。雷达定时发出脉冲光,同时电机带动发射镜旋转,这样就可以构成二维点云数据。
当周边环境存在透明介质时
难点:当周边环境中存在透明介质 (如洁净水体) 时,位于透明介质内部或后方的目标能够被测到。由于光线在透明介质中会发生折射,被测目标实际上位于折射光路上,而测量结果则位于直线光路上,测量出的目标位置会发生偏差,此外,雷达也可能会收到两个反射回波,一个来自于透明介质内部或后方的实际目标表面的反射,另一个来自于不完全洁净的透明介质表面的漫反射,此时的测量结果不确定,有可能是介质表面,也可能是实际目标。
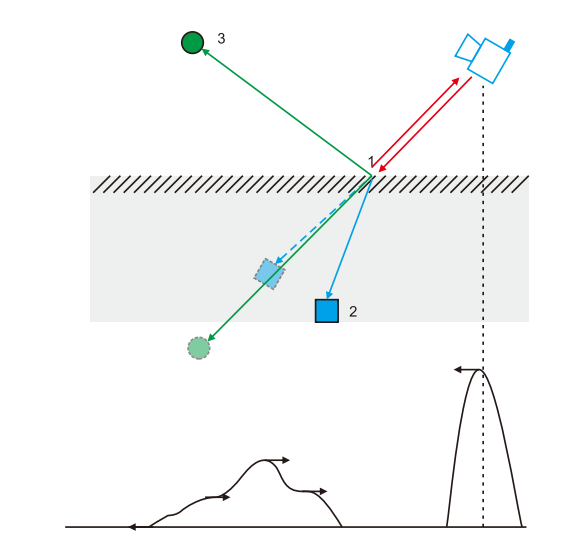
对策:在实际使用中,对环境中的透明介质,特别是表面接近镜面的透明介质,需要做特殊处理,避免产生不稳定或错误的测量结果。具体的处理方式可以是对介质表面做漫反射半透明处理,降低透明度和反射能力,或者在处理测量数据时对这些位置做屏蔽。
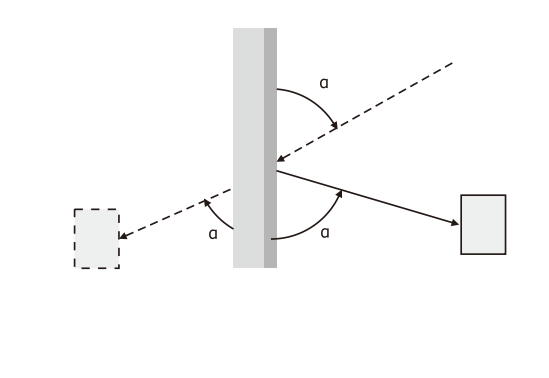
当测量镜面目标时
当雷达对镜面目标进行测量时,需要注意!!仅当目标表面与入射激光垂直时才能有效测量,如果激光入射角不垂直,其漫反射率很低,导致无法有效测量,实际测量到的结果是镜面反射光路上的镜像目标距离,如图所示:
雷达投射在镜面目标产生了全反射,全反射光投射在目标,雷达实际测试出距离是虚线边框目标距离。
关于实际量程
雷达对特定目标的实际量程会受到如下因素的影响:
1、目标漫反射率:
目标漫反射率不但与材质有关,也与表面朝向有关。目标漫反射率越高,实际量程就越远
2、反射面积:
目标表面被激光光斑覆盖的面积。覆盖面积越大,实际测量距离越远
3、透光罩脏污程度:
雷达的透光罩脏污会造成透光性能下降,透光性能下降得越多,测量能力越差,透光率下降至 60%时,测量能力可能完全失效
4、大气条件:
雷达的实际测量能力同时受到大气条件的影响,特别是在户外工作时。大气的光传播能力越差,雷达的实际测量能力越低。在极端天气条件 (例如浓雾)下,测量能力会完全失效
-
传感器
+关注
关注
2579文章
55953浏览量
796151 -
自动化
+关注
关注
31文章
6033浏览量
90985 -
激光雷达
+关注
关注
984文章
4632浏览量
197535
发布评论请先 登录



评论