 GNSS+IMU+MM车载高精度组合导航定位系统对比分析
GNSS+IMU+MM车载高精度组合导航定位系统对比分析

前言:近年来,随着定位业务的迅速发展,用户对于车载端定位精度提出了越来越高的要求,由原来的导航级逐渐更替到车道级。特别是在城市峡谷环境下(高楼、高架),用户无法接收到GNSS信号或GNSS信号受干扰,导致GNSS无定位结果或定位精度差。这是“有源定位”固有的缺点,无法从算法上来克服。针对这个问题,以GNSS+IMU等多传感器融合方案越来越受到重视,因为“无源定位”的IMU恰好可以弥补卫星定位的短板。
1.基础原理
导航卫星系统(GNSS)
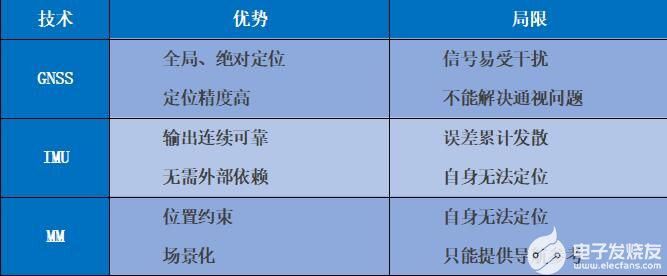
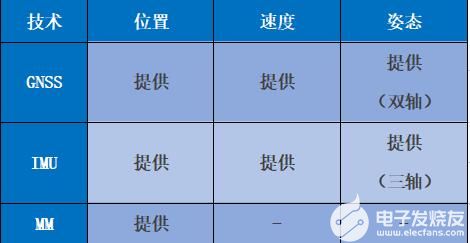
全球导航卫星系统(Global Navigation Satellite System)是一种依靠卫星卫星的伪距载波、星历、时间以及钟差等信息进行实时定位的空基无线电导航系统,能在地球表面或近地空间的任何地点为用户提供全天候的三维坐标和速度以及时间信息。GNSS系统的优点是精度高、误差稳定不发散,但容易受到周围环境影响,比如树木楼房遮挡,镜面等高反射物体引起的多路径效应。
惯性导航系统(IMU)
惯性导航系统(Inertial Navigation System)是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航那样)的自主式导航系统,主要使用惯性测量单元IMU(Inertial measurementunit)。其工作环境不仅包括空中、地面,还可以在水下。惯性导航的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。其优点是工作不需要通时,安装位置随意,定位范围全场景,但定位精度不高,且误差随时间发散。与GNSS导航系统互补。
地图匹配技术(MM)
地图匹配技术MM(Map matching)是结合用户位置信息和地图数据,推算用户在地图上道路的准确位置,辅助车载导航的精准控制。
航位推算法(DR)
航位推算法DR(Dead Reckoning)是一种跟踪导航算法,在获取载体当前时刻坐标位置的前提下,依靠惯性测量单元IMU取得的同周期内载体移动的距离和方位,进而推算下一时刻位置。在此文介绍中,主要讲建立在已有GNSS系统解算下,IMU辅助进行组合导航的算法。

2,车载定位的痛点
车载导航定位发展已经很久,但随着精度要求越来越高,车载定位的一些问题也逐渐浮现:
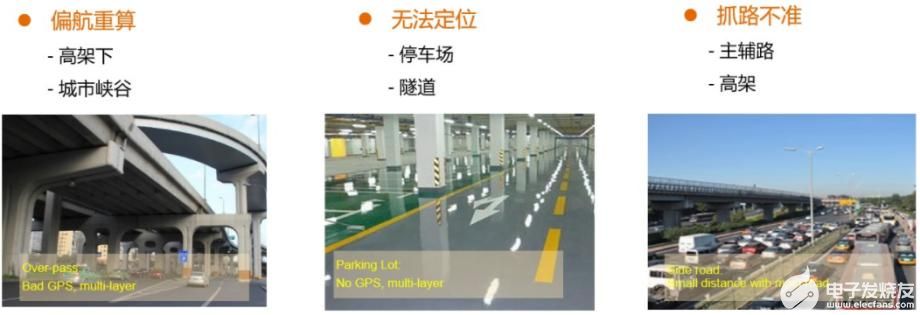
偏航重算:是指在高架或城市峡谷,信号遮挡引起位置点漂移;
无法定位:是指在无信号区域(停车场、隧道)推算的精度低,导致出口误差大;
抓路错误:是指主辅路、高架上下抓路错误。
其中偏航重算和无法定位主要是GNSS定位原理决定,GNSS定位精度受观测环境影响,难以改善;对于抓路错误,直接原因是正确道路与误抓道路相隔太近,受定位精度限制无法区分;根本原因是只使用位置信息进行抓路,没有发挥其它数据的价值。
3,技术方案
以上介绍的关键技术中,在场景覆盖以及精度上,各有所长,互相补充。
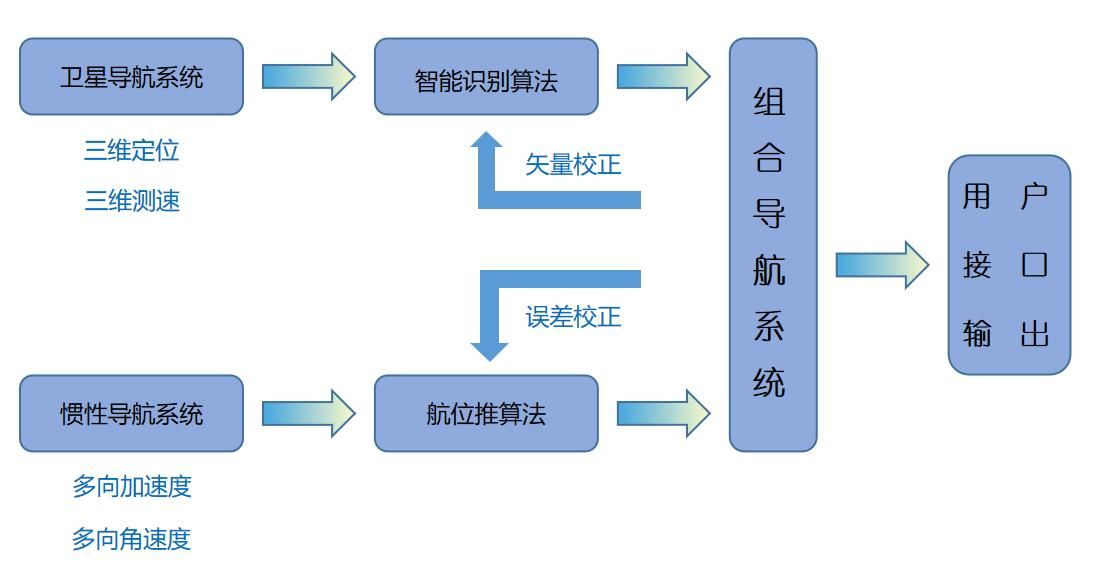
根据主流这三种定位技术进行融合,提出GNSS+IMU+MM方案,依靠算法(DR)+数据(POS/HEAD)提高定位的可靠性。
从上述车载定位的几大问题,可以逐步拆分解决:
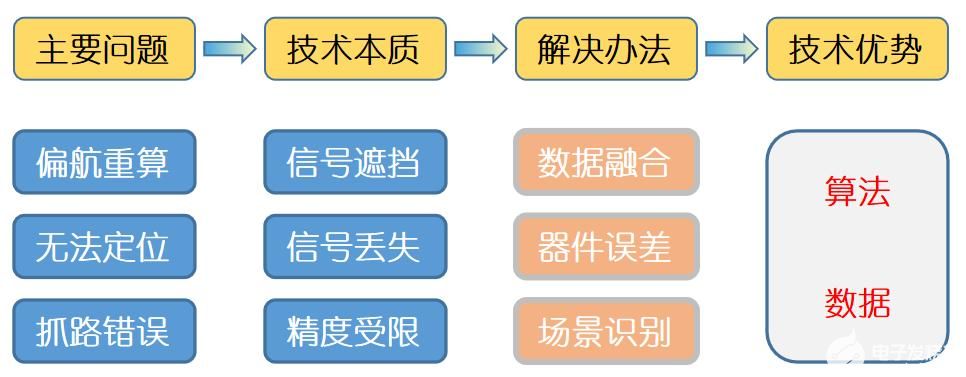
数据融合:这一部分主要是计算GNSS模块输出的位置、速度、时间和航向信息,将其数据传递至数据处理终端进行实时数据融合计算,判定当前GNSS数据质量的好坏,根据其数据质量组合不同的定位判断策略。
器件补偿:在GNSS信号质量不好或无法定位的时候,只能依靠IMU的DR算法进行补偿。补偿模块的主要功能是利用GNSS数据来补偿速度敏感器误差参数(比例因子)和IMU的误差参数(陀螺仪天向比例因子和陀螺仪三轴零偏)。补偿的目的是在无GPS信号或弱GPS信号的场景,仅靠DR算法也能得到较为可靠的导航信息(通常短时间也能保证厘米级定位)。
场景识别:依靠内置场景化地图数据源以及实时外部传感器收集的环境信息进行场景判断,确定此刻载体地图位置,辅助系统对于周围环境感知进行行为判断。一般采用高精度街景地图源、激光雷达和毫米波雷达进行环境感知。
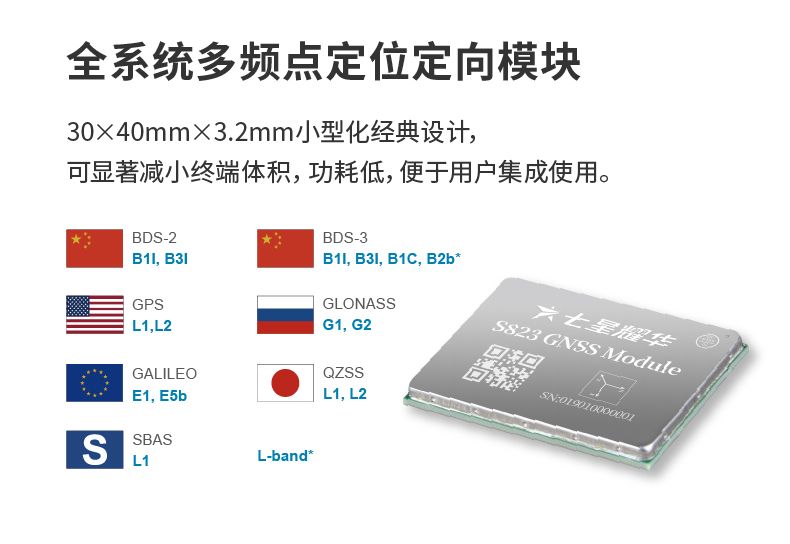
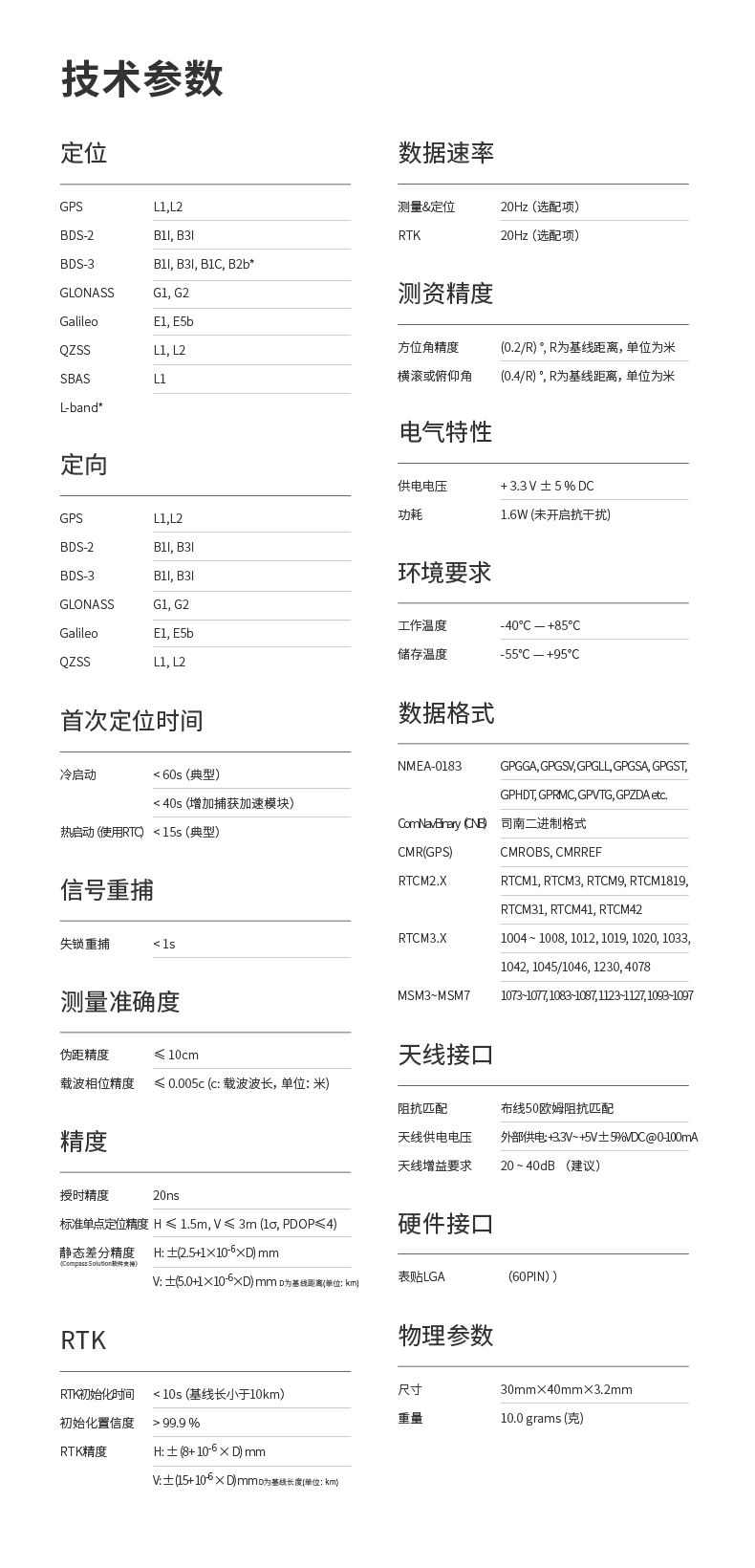
以七星耀华S823模块为例,采用自适应组合导航设计,支持RTCM2.X/3.X差分数据格式接入,在空旷环境可实现厘米级的定位精度;内置一体化惯导模块,可以实现在复杂环境下的高精度导航。
依靠于自主研发的高精度定位算法,根据车载载体当前运行环境,系统自适应对当前卫星质量进行评估,依据卫星质量进行组合导航。
当卫星条件良好时,以卫星导航为主,结合高精度RTK算法,实时定位精度≤±2.5cm,测速精度优于0.03m/s;当卫导无法正常工作时,以惯性导航为主导,3S内精度保持厘米级,10S内精度保持米级。
-
定位系统
+关注
关注
10文章
642浏览量
37477 -
导航
+关注
关注
7文章
570浏览量
43725 -
GNSS
+关注
关注
9文章
949浏览量
50718 -
IMU
+关注
关注
6文章
403浏览量
47595
发布评论请先 登录
高性能单片机车载惯性和GPS组合导航模块
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统
如何深入了解GNSS,打造更高精度、更高效的导航定位?
AVT1200 北斗高精度车载定位终端
广和通与华大北斗达成全球战略合作,携手打造高精度GNSS定位解决方案
GNSS+IMU+MM车载组合导航系统解决方案
高精度车载GNSS定位导航模块怎么选,车载导航定位模块介绍

高精度GNSS定位定向模组M20D实现无人配送车导航定位的原理

基于ST第五代高精度定位芯片的车载定位P-BOX方案

高精度GNSS+INS组合导航:速度、位置、姿态全掌握

单天线也能高精度导航?组合导航如何做到低成本与高性能兼得?






 工商网监
工商网监
评论