 自动驾驶高精组合导航设备导远570D拆解
自动驾驶高精组合导航设备导远570D拆解

-----硬件拆解报告第 8篇-----
这期带来自动驾驶高精组合导航设备拆解,本次拆解分析的产品是导远570D。
导远INS570D 是一款基于 MEMS 惯性导航技术、融合卫星导航(支持 RTK)和车辆信息(轮速、档位等)、满足车规级标准设计和制造的高性能组合导航定位产品。具备在多种场景下向车辆提供准确姿态、航向、位置、速度和传感器数据等信息的能力。
导远570D实验装置整体配置示意图。
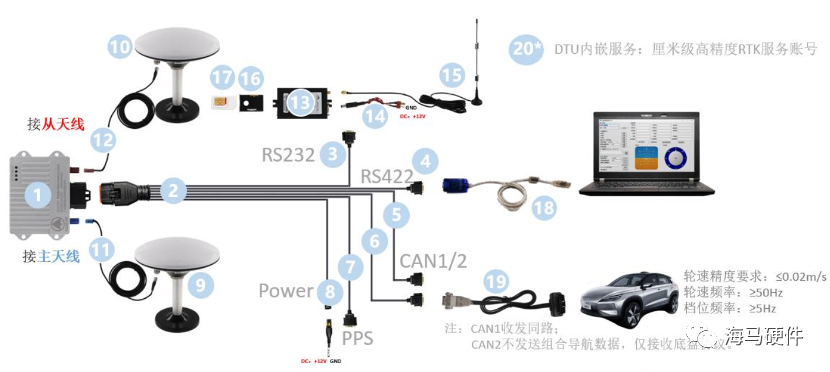
一外形结构概览
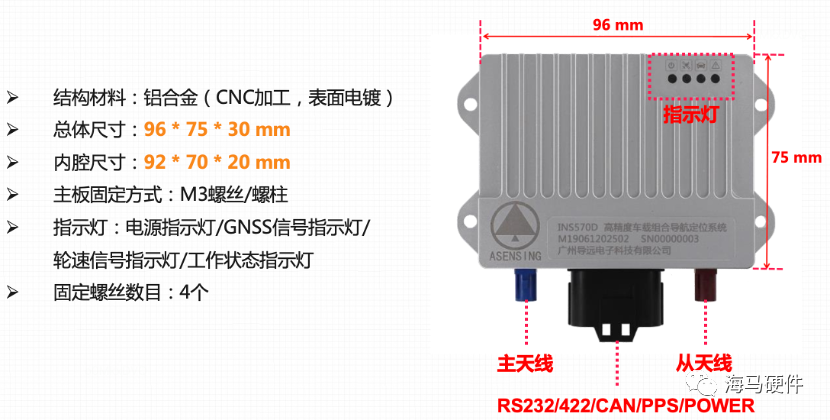
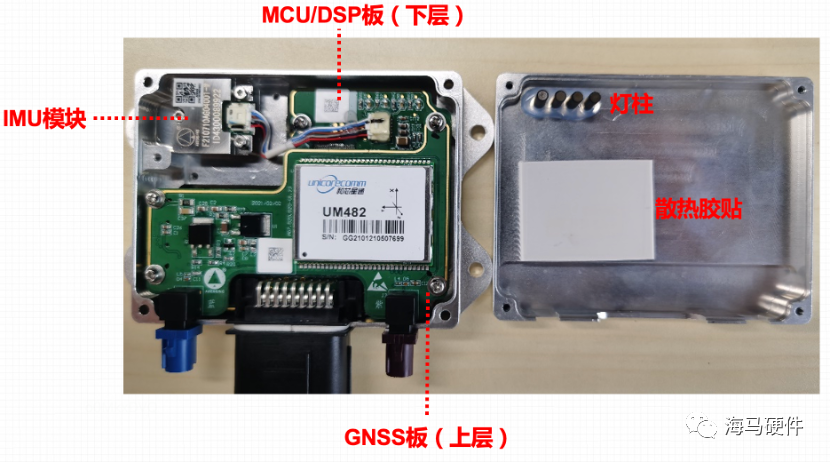
先打开上盖,主要由独立惯性测量单元(IMU模块)和主控底板+GNSS板三部分组成。
在组合导航系统中,IMU提供快速、实时的运动和姿态信息,但IMU存在累积误差,通常会与卫星定位结合使用,对IMU的数据进行校准,提高长期的导航精度。 在没有外部参考点或信号(如GNSS信号)丢失的情况下,组合导航算法主要依赖IMU提供连续的、未校准的导航数据。这一点在隧道、城市峡谷或其他卫星信号可能被阻挡的环境中尤为重要。 IMU是实现高精度和高可靠性组合导航的基础组件之一,它为系统提供快速的动态响应,确保了在各种条件下都有稳定的导航能力。
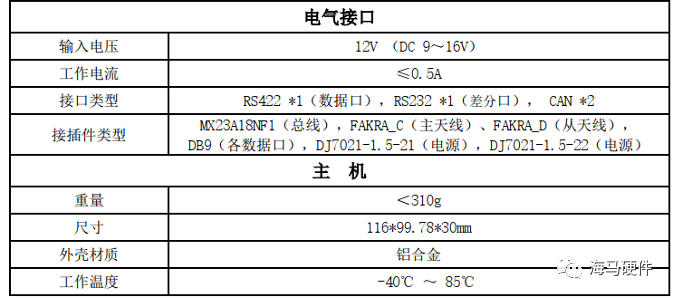
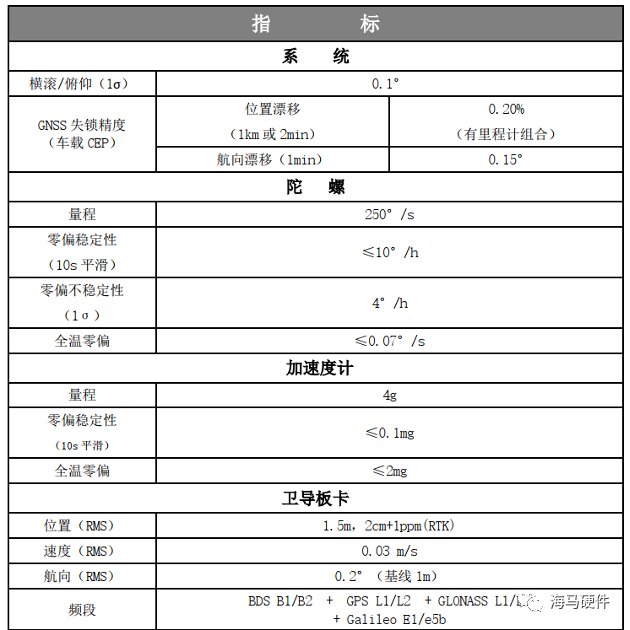
二核心技术参数
以下是导远570D的核心技术参数:
GNSS相关可以参考:
卫星定位技术学习笔记(GPS/北斗/SBAS/RTK/RTD/NMEA/CEP等等)
深度剖析GNSS高精度定位原理
这里简单介绍一下IMU相关的技术参数指标含义:
全温零偏:在全程温度范围,输入为零时,输出一条复合白噪声信号缓慢变化的曲线,曲线的平均值就是零偏
零偏稳定性:当输入为零时,衡量陀螺仪输出量围绕其均值(零偏)的离散程度。要注意评估条件,如平滑时间(1s、10s),标准差(1σ),测试温度。一般为 x deg/hr 1σ 或 x °/hr 1σ
零偏不稳定性:描述一段时间之后,MEMS的零偏的变化情况。零偏稳定性通常定义为1σ值,单位为∘/√h,又称为零漂,并不是一个完全的随机游走,它的范围是有限的,零漂对角度的影响是线性的
零偏重复性:在同样条件下及规定时间间隔内,重复测量零偏之间的一致程度,以各次测试得到的零偏的标准差表示。单位为°/h,°/s
随机游走:传感器的高斯白噪声,单位一般为deg/√h或deg/s/√Hz,需要区别角速率输出还是角增量输出
温度补偿范围:传感器额定输出和零点输出的温度影响不超过规定技术指标的环境温度范围
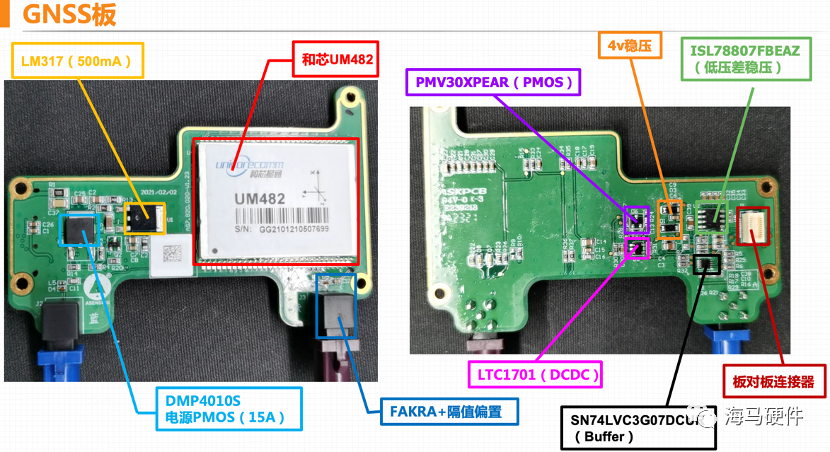
三GNSS板拆解
上层GNSS板主要负责卫星定位数据采集,双天线输入,高精定位模组采用了和芯星通的UM482。
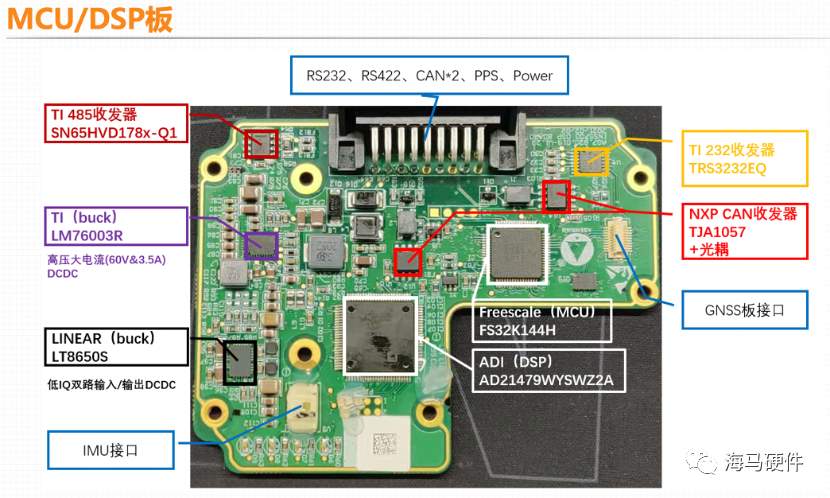
四 主控核心板拆解
主控核心板正面,主芯片由DSP和MCU构成,DSP负责组合导航算法,MCU负责整车通讯和控制,RS232、RS422、CAN接口都有。
主控核心板背面较为简单,主要是阻容、二三极管和flash、485驱动芯片。
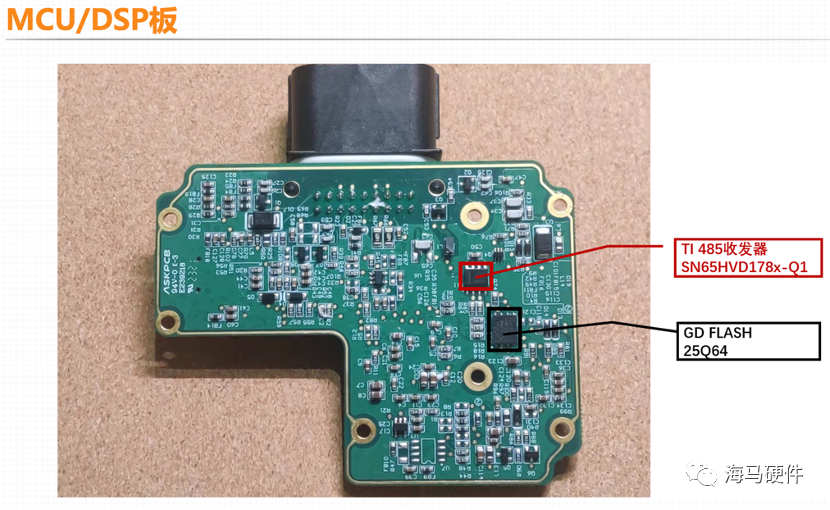
五主控核心器件展示
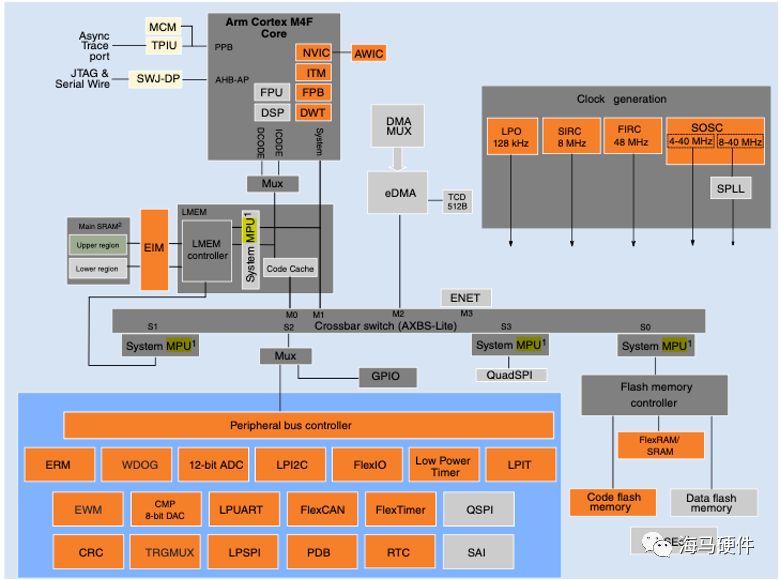
主板MCU主要负责IMU数据转换、GNSS板数据采集、CAN等外设通信,MCU型号为-FS32K144H,核心参数和架构如下:
Arm Cortex-M4F ,32位
主频最高112MHz
-45°C~105°C(高速)/125°C(正常模式)
512KB Flash(同系列最高2MB)
64KB RAM(同系列最高256KB)
Armv7结构、集成DSP、FPU
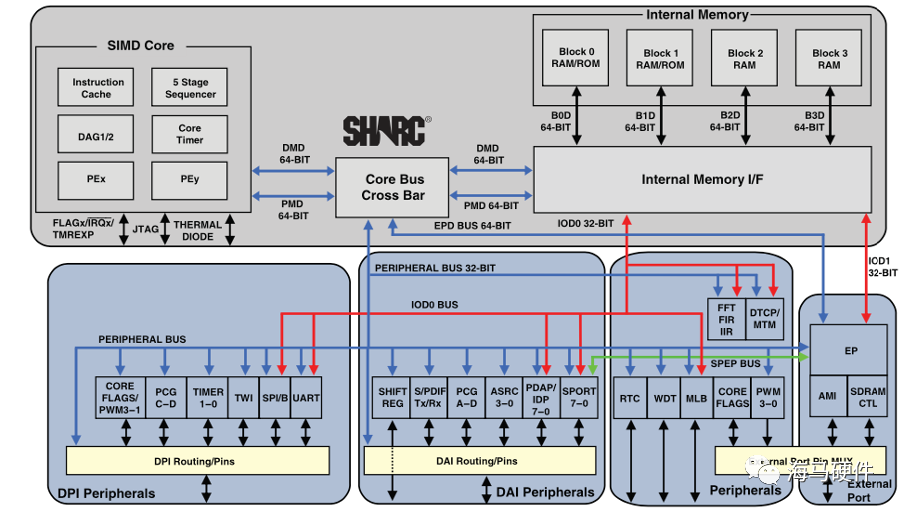
主板DSP主要负责组合导航数据解算,从硬件架构来看可以支持松耦合和紧耦合算法,DSP型号为AD21479WYSWZ2A,核心参数和架构如下
SHARC结构(super harvard architecture)
主频最高266MHz(同系列最高300MHz)
-45°C~105°C
5Mbit RAM、4Mbit ROM。
FIR、IIR、FFT加速器,矩阵计算、平方根倒数、乘除加速
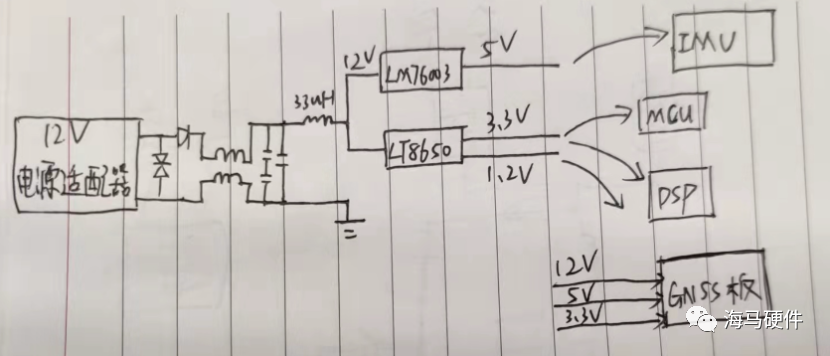
整机系统电源框图(纯手工打造)
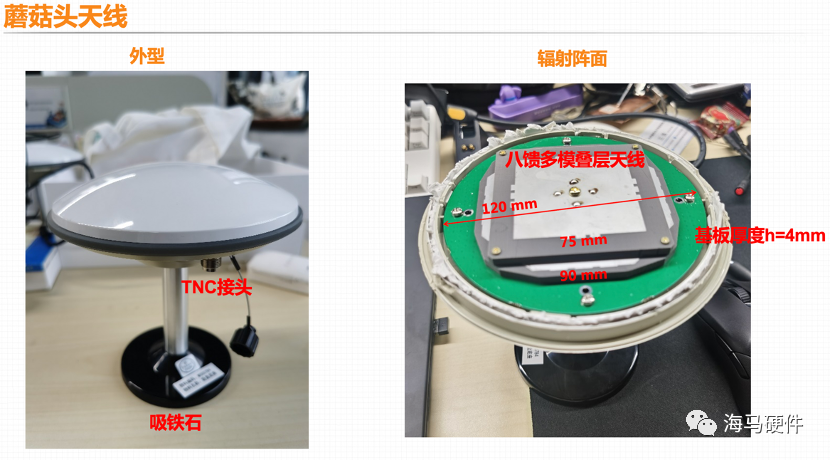
六 蘑菇头天线拆解
再来看下导远D570整套实验系统搭配的大蘑菇头天线。
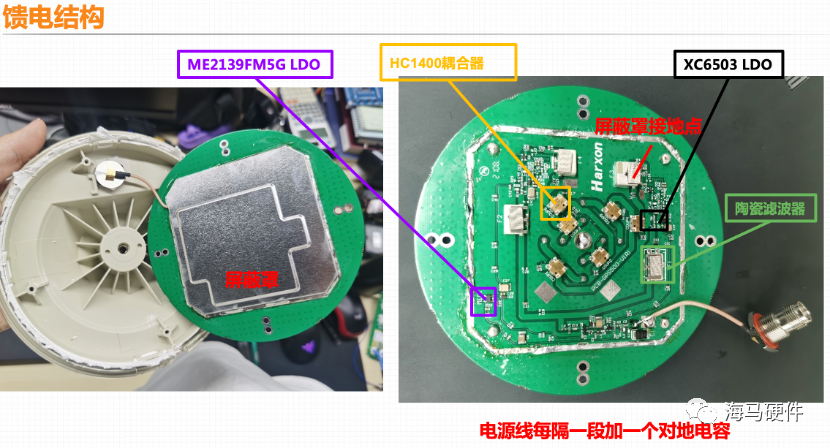
天线底部拆解
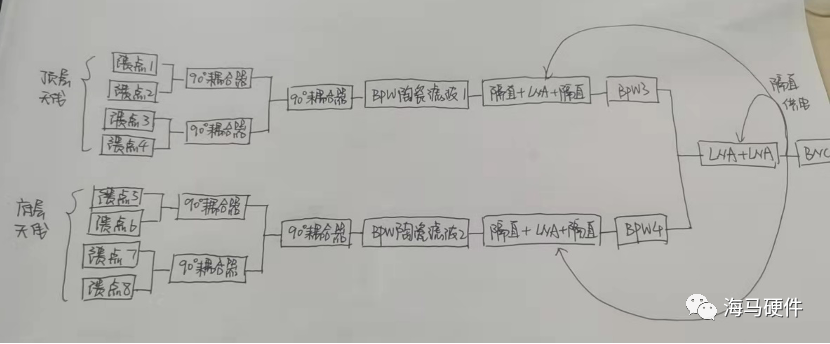
天线设计框架图(还是纯手工打造)
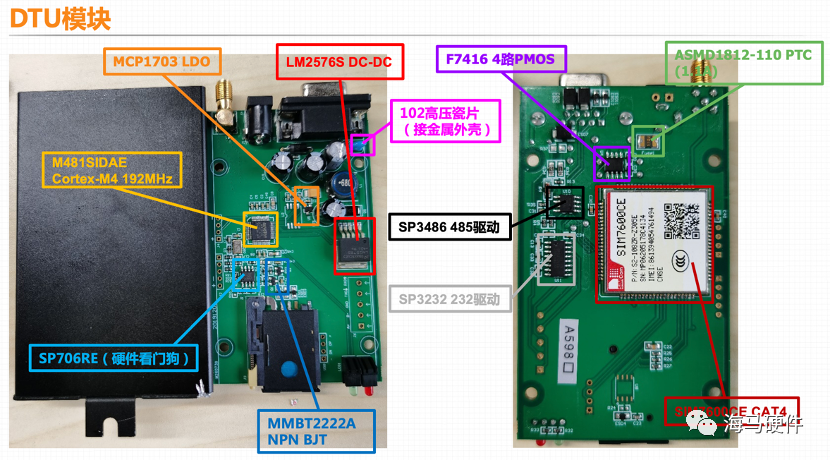
因为支持RTK定位,因此还搭配一个4G DTU上网盒子,这个看起来像是市面上买的成熟产品或者找供应商ODM的了,简单拆解如下:
七总结
本文通过对导远570D自动驾驶高精组合导航设备的拆解和分析,为我们展示了该设备的内部构造和核心技术参数。
在拆解过程中,我们详细了解了导远570D的核心组件,包括独立的IMU模块、主控底板、GNSS板和核心处理板。通过拆解主控板上的MCU和DSP的技术规格和功能,揭示了它们在处理IMU数据转换、GNSS数据采集以及执行复杂的组合导航算法中的核心作用。同时,我们还了解了配套的大蘑菇头天线和4G DTU上网盒子,它们在整个系统中提供了重要的通信和定位功能。
通过本次拆解,不仅让我们更近一步地了解了导远570D的内部结构,也为我们展示了高精组合导航设备的技术进步和应用潜力。随着自动(辅助)驾驶和智能交通系统的快速发展,可以预见,高精组合导航技术将在未来发挥越来越重要的作用。
审核编辑:汤梓红
-
mems
+关注
关注
129文章
4555浏览量
199901 -
GNSS
+关注
关注
9文章
1032浏览量
51492 -
导航设备
+关注
关注
0文章
12浏览量
8445 -
自动驾驶
+关注
关注
795文章
15057浏览量
181994
发布评论请先 登录
自动驾驶真的会来吗?
UWB主动定位系统在自动驾驶中的应用实践
自动驾驶汽车的定位技术
自动驾驶系统设计及应用的相关资料分享
自动驾驶的核心基础在高精3D地图
自动驾驶技术最新进展:自动驾驶系统与高精地图关系

为什么自动驾驶汽车离不开高精地图
解读自动驾驶车辆专用高精地图的魔力
华芯携手北斗星通共同打造自动驾驶高精定位产品级解决方案
自动驾驶高精定位

国内首个L3级自动驾驶之城诞生,高精定位和高精地图成为关键支撑

自动驾驶高精组合导航设备拆解-导远570D

自动驾驶仿真测试实践:高精地图仿真




评论