 S曲线的基本变换计算
S曲线的基本变换计算

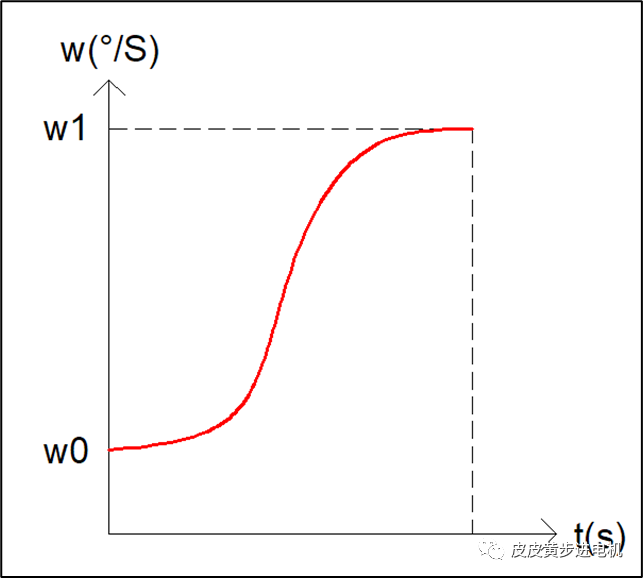
摘要: 本节介绍S曲线的基本变换,将基本形式的S曲线变换成为任意过两点的S曲线,为后续步进电机S曲线运动提供理论支撑
一.计算目标
①计算经过任意不同两点的S曲线方程
②可调节曲线平滑度
③可调节曲线对称度
④绘制其图像
二.计算过程
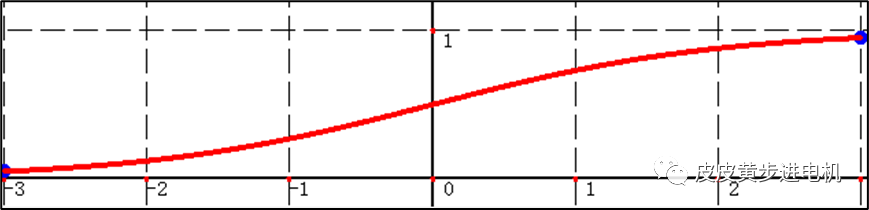
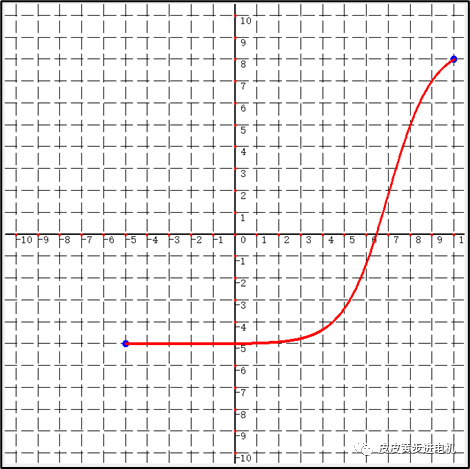
2.1 S曲线基本形式
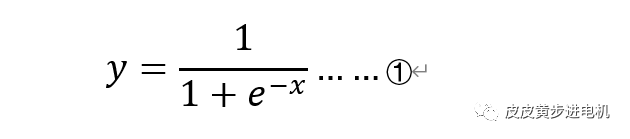
2.2 S曲线变换
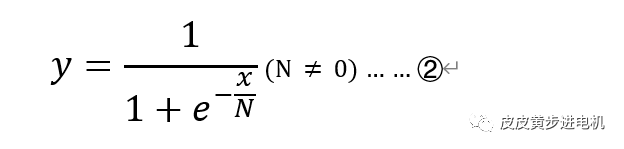
第一步: 进行X轴比例变换,比例系数为N(N≠0)
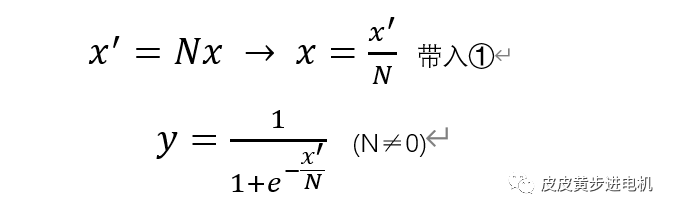
变换后S曲线方程为:
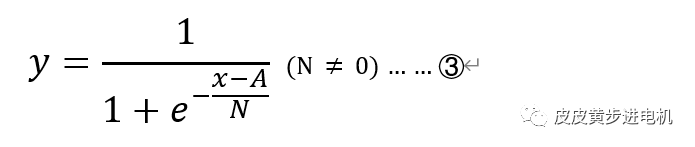
第二步: 进行X轴平移变换,平移系数为A
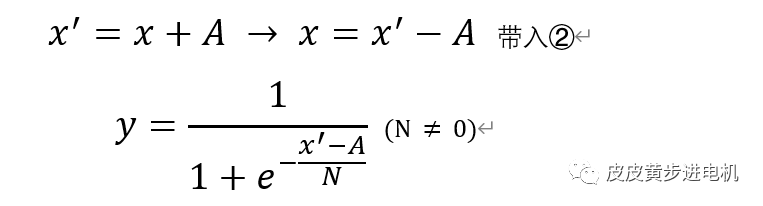
变换后S曲线方程为:
第三步: 进行Y轴比例变换,比例系数为K(K≠0)
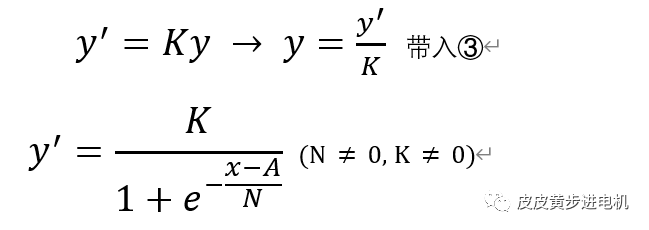
变换后S曲线方程为:

第四步: 进行Y轴平移变换,平移系数为B
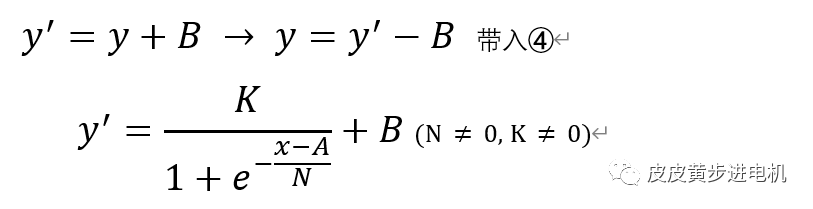
变换后S曲线方程为:
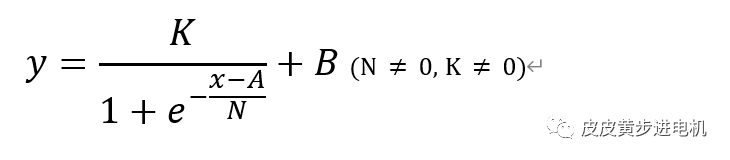
最终得到S曲线变换之后函数关系式:

其中:
N-X轴方向比例变换系数
K-Y轴方向比例变换系数
A-X轴方向平移系数
B-Y轴方向平移系数
2.3 参数计算
要求变换之后的S曲线经过P1(X1,Y1),P2(X2,Y2)两点,可建立方程
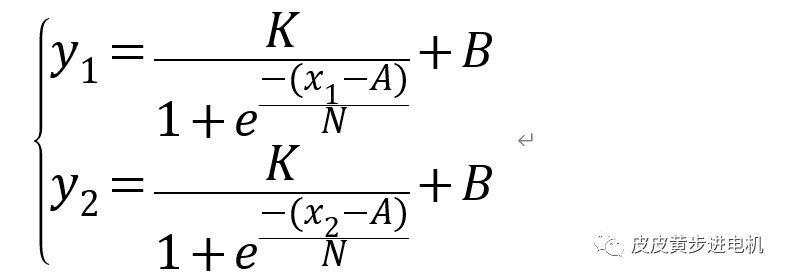
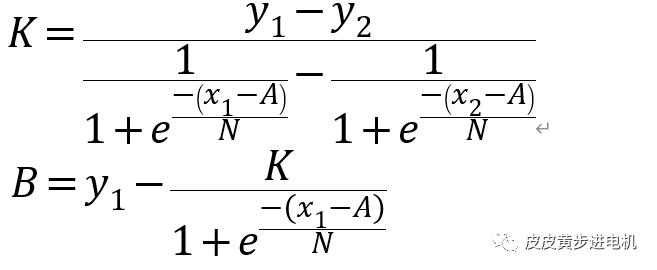
方程有N,K,A,B四个未知数,需要给定2个参数由用户设定,此处选择N,A,则可求得K,B值为:
其中N值作为X轴方向比例变换系数,N>1时,S曲线X方向放大,N<1时,S曲线X方向缩小,可以将N值等效为S曲线的平滑度调节参数
其中A值X轴方向平移系数,A>0时,S曲线向X正方向平移,A<0时,S曲线向X负方向平移,可以将A值等效为S曲线的对称度调节参数
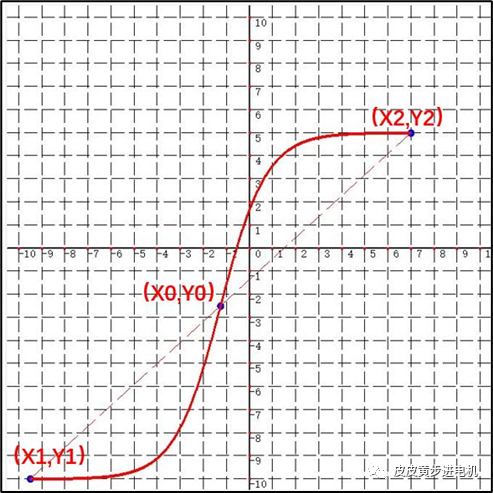
2.4中心对称条件
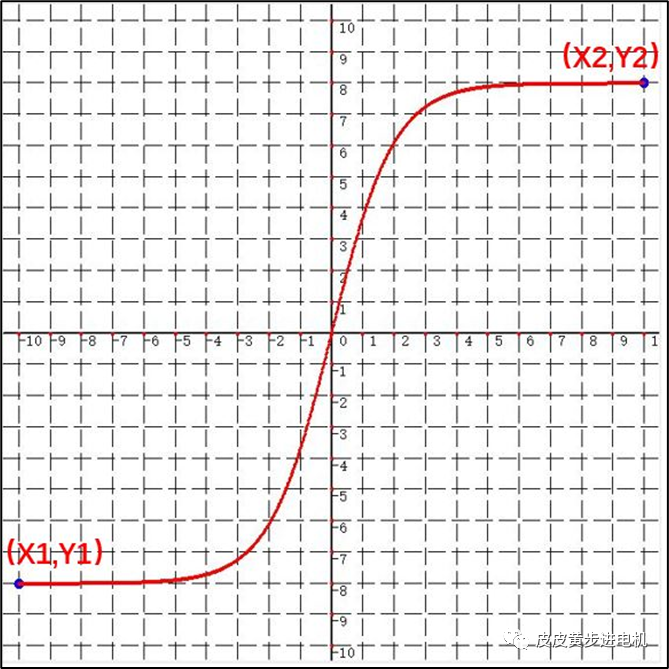
当随意给定N,A值时,S曲线容易出现失真,如下图所示
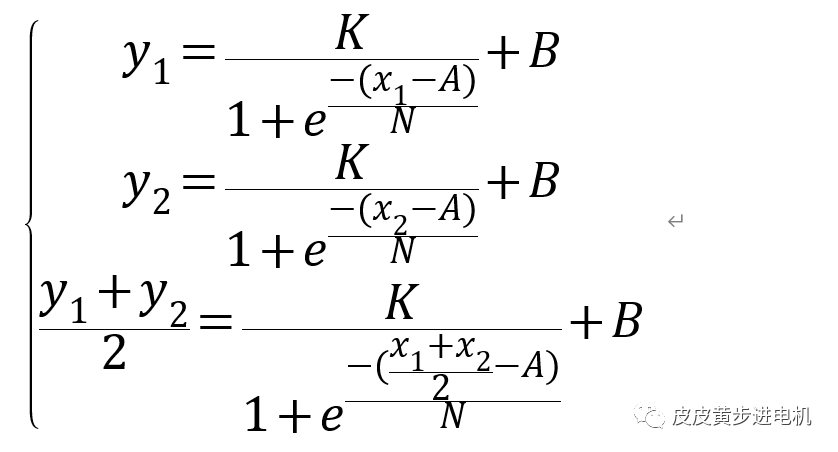
为确保经过P1,P2两点的S曲线也为中心对称,则要求S曲线经过P1P2连线的中点P0(X0,Y0),如图所示
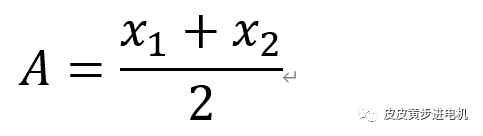
则可建立三个等式
N由用户设定,可求得A值
三.总结
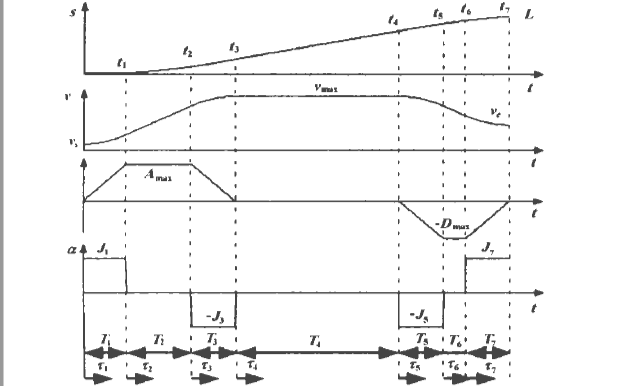
通过上述计算,完成了目标中的4点要求。在不同的应用场景中,可以根据实际情况去对该S曲线进行灵活处理。S曲线代表的v-t图像中对其进行求导可以求得a-t关系。
-
步进电机
+关注
关注
153文章
3272浏览量
152785 -
s曲线
+关注
关注
0文章
6浏览量
5840
发布评论请先 登录
LLC增益曲线过程推导和参数如何计算
S型曲线在体育预测问题中的应用
圆曲线坐标计算公式
如何使用S曲线进行步进电机加减速的控制设计资料说明
如何实现S曲线加减速算法研究
c语言s型曲线方程电机控制|S曲线加减速




评论