 KUKA机器人视觉抓取的工作原理
KUKA机器人视觉抓取的工作原理

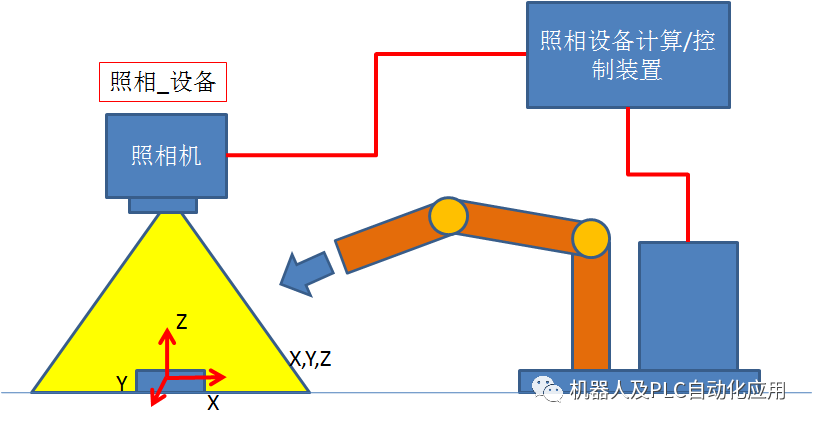
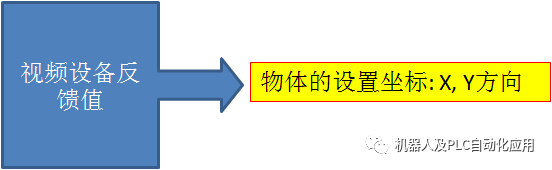
视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的.
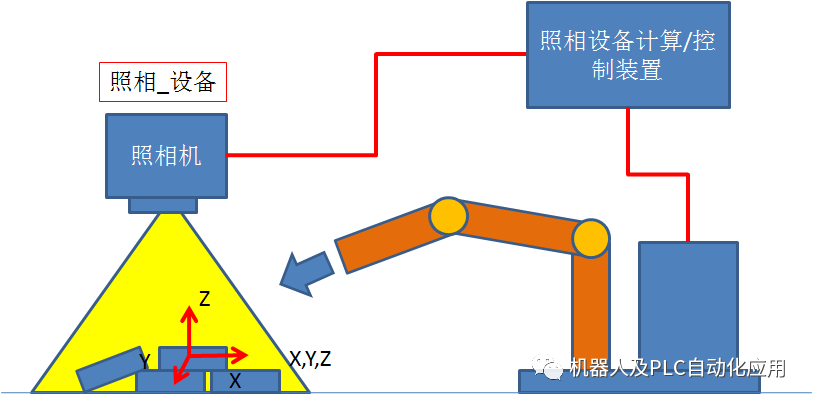
物体位置的变化主要是它位置的X,Y,Z 方向的变化.
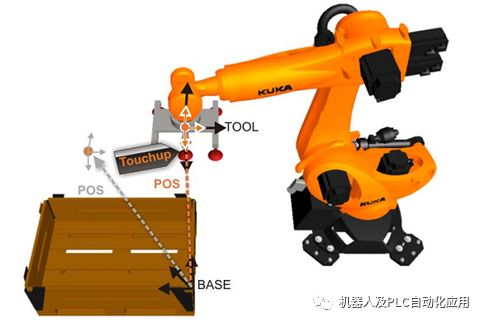
BASE坐标系:可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
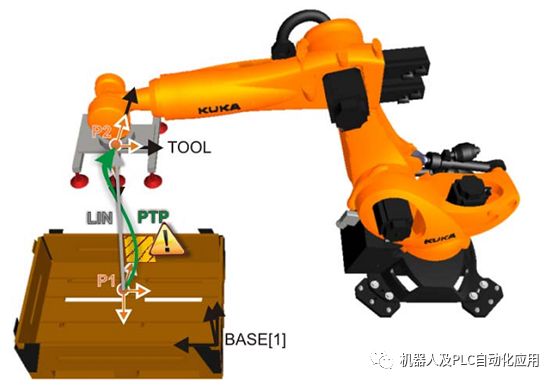
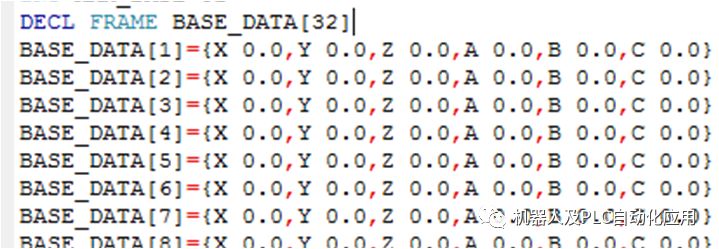
以改变BASE 坐标系为例:
KUKAC4 现在可以使用32个BASE 坐标系
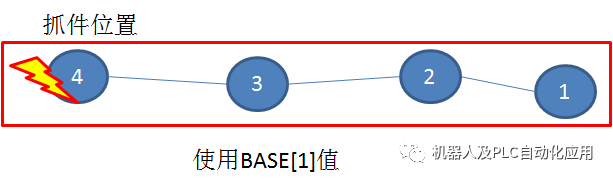
没有使用视觉补偿功能时,只用一个BASE坐标系.
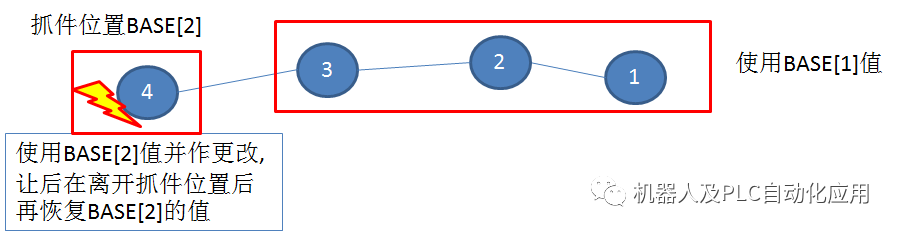
改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系.
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31782浏览量
224934 -
TCP
+关注
关注
8文章
1441浏览量
84016 -
KUKA
+关注
关注
3文章
218浏览量
17566
原文标题:KUKA 机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人视觉——机器人的“眼睛”
大量的编程时间,进步生产效率和加工质量。 我国视觉机器人应用主要有以下目的:用以代替人类从事危险、有害和恶劣环境、超净环境下的工作;把人从肮脏、繁重的劳动中解放出来;进步劳动生产率,改
发表于 01-23 15:02
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由本人是嘉兴技师学院教师,浙江机器人
发表于 09-18 14:18
【瑞芯微RK1808计算棒试用申请】基于机器视觉的工业机器人抓取工作站
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由 本人是嘉兴技师学院教师,浙江机器人
发表于 09-18 19:24
KUKA机器人视觉抓取的工作原理讲解
BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
KUKA机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解
BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
KUKA机器人视觉抓取的工作原理
BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
发表于 09-16 15:35
•1088次阅读
浅谈机器人视觉抓取的目的
机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地
发表于 03-30 10:19
•1205次阅读

基于视觉的自主导航移动抓取机器人搭建方案
经过以上对移动抓取机器人系统详细的剖析,我们可以知道移动抓取机器人系统并不是简单的“堆料”,而是以移动底盘的智能路径规划、视觉识别、移动底盘
发表于 12-19 15:09
•1924次阅读



评论