 扫地机器人里各类传感器的重要作用
扫地机器人里各类传感器的重要作用

服务机器人在社会生活中越来越常见,广泛见诸于物流/运输、安保、保洁、家政、爱好/娱乐,以及护理/协助等各种应用场景。但无论是哪种应用,都要在保持人机交互(HMI)通信顺畅的同时,还要满足对安全以及实时响应等诸多要求。对于服务机器人来说,传感器的作用至关重要。本文将以扫地机器人为例介绍各类传感器的重要作用。
扫地机器人中用到的TDK产品
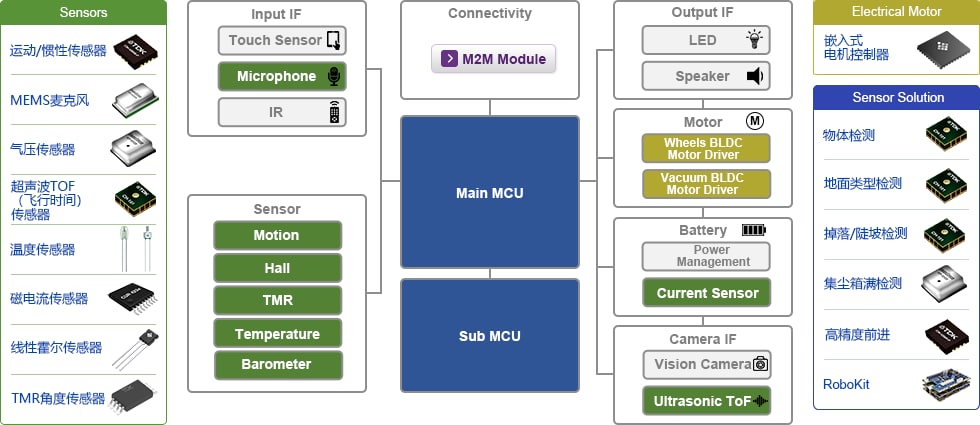
扫地机器人用到的传感器种类繁多,比如检测位置用的运动传感器;语音识别用的麦克风;检测尘盒是否已满的气压传感器;检测障碍物用的超声波ToF传感器,检测室内环境用的气体和温度传感器;管理电池电量用的电流传感器,以及检测角度和位置用的霍尔和TMR传感器等。此外,还有专为驱动小型有刷、步进或无刷电机而设计的嵌入式电机控制器,能将一体式MCU用作终端应用的内置辅助微控制器。针对特定应用需求,TDK还可提供其他传感器解决方案。
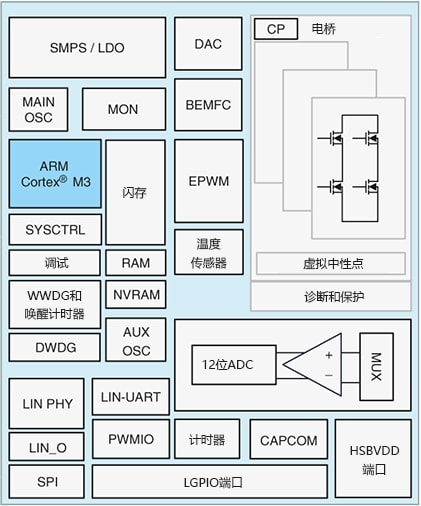
图1:框图 - 扫地机器人
检测地板类型、陡峭断面和障碍物
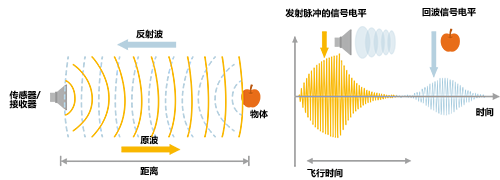
我们通过地板类型、陡峭断面和障碍物检测应用介绍TDK的CH101和CH201超声波飞行时间距离传感器的功能。
CH101和CH201均为小型超低功耗的超声波飞行时间 (ToF) 距离传感器,分别可精确测量最远1.2m和5m的距离。传感器借助超声波脉冲回波测量距离,能在任何照明条件(包括阳光照射)下工作,具有毫米级的测量精度,且不受目标颜色和透明度的影响。传感器具有宽视场 (FoV) 的特点,能同时测量与视场中多个物体的距离。
对于地板类型检测应用,可使用CH101模块的信号测量来实现。此应用是通过测量反射的超声波信号的平均幅度来判断目标表面是“硬”还是“软”。
存在性检测应用则通过运动检测来确定是否有人或物体存在。这两种传感器都可实现此应用。
对于陡峭断面检测应用,则使用CH101模块来实现,模块中可配置和运行一个或多个CH101传感器。
上述应用广泛见诸于各种机器人产品,比如无人机、吸尘器、自主移动机器人 (AMR)、类人机器人或协作机器人。
图2:检测地板类型、陡峭断面和障碍物
超声波感应基础
| 地板类型检测 | 障碍物检测 | 跌落/陡峭断面检测 |
|---|---|---|
 |
 |
 |
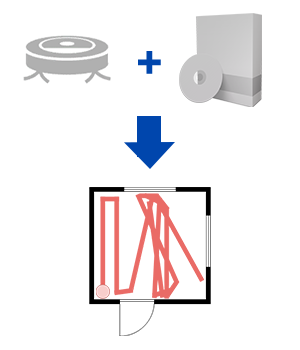
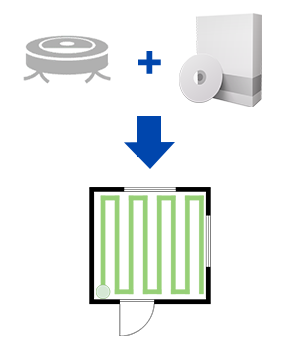
RoboVac(软件解决方案)
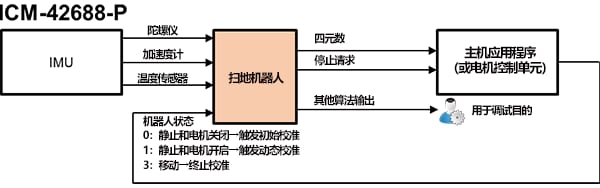
RoboVac软件专为扫地机器人应用中的高级6轴运动传感器ICM-42688-P而开发,是一款支持软件,可充分发挥ICM-42688-P的性能,同时弥补MEMS运动传感器的已知缺点。
TDK的RoboVac软件实现的主要功能包括:
・ 充分利用ICM-42688-P的高分辨率(20比特)、精确采样 (RTC) 和稳定性 (VLN) 等特点,同时融合6轴数据,为机器人路径规划提供精准导航;
・ 在机器人启动后和准备就绪之前校准传感器偏差;
・ 预测因时间和温度导致的综合降额,并指示主机停止以进行动态校准;
・ 动态校准因时间和温度引起的传感器漂移。
图3:ICM-42688-P
ICM-42688-P (完美适用于机器人运动跟踪应用的高性能6轴IMU)
・ 6 轴MEMS运动传感器;
・ 行业领先的性能,具有噪声小、灵敏度高、时间和温度漂移低等特点;
・ 具有可提高应用性能的独特功能,与RTC、20位ADC、高达32kHz的ODR同步采样;
・ 低功耗
低噪声模式下的加速度计+陀螺仪:880μA
低功耗模式下的加速度计:˂50μA
・ 小型封装
2.5 x 3.0 x 0.91 mm (LGA-14)

| 主要参数 | ICM-42688-P | 备注 | |
|---|---|---|---|
| 陀螺仪 | 灵敏度误差 (%) | ±0.5 | 陀螺仪最关键的参数 |
| 灵敏度温度系数 (%/°C) | ±0.005 | 超大动态温度范围应用的关键参数 | |
| 零偏 (dps) |
±0.5 (板级) |
越小表示越容易进行初始校准,甚至能忽略不计 | |
| 零偏温度系数 (dps/°C) | ±0.005 | 越小表示受温度变化的影响越低 | |
| 噪声密度 (dps/√Hz) | 0.0028 | 机器人应用的关键参数 | |
| 加速度计 | 灵敏度误差 (%) | ±0.5 | |
| 灵敏度温度系数 (%/°C ) | ±0.007 | ||
| 零偏 (mg) |
±40 (板级) |
越小表示越容易进行初始校准,甚至能忽略不计 | |
| 零偏温度系数 (mg/°C ) | ±0.15 | 越小表示受温度变化的影响越低 | |
| 噪声密度 (μg/√Hz) | 75 | 机器人应用的关键参数 |
图4:传感器融合和应用时校准软件对机器人航向跟踪的重要性
常规6轴传感器融合和校准
VS
TDK的RoboVac(软件解决方案)
・同类最佳的融合性能;
・可在应用时智能校准;
・提供集成和微调技术支持。
图5:RoboVac的算法说明
・IMU加速度计、陀螺仪和温度测量数据(来自ICM-42688-P)会发送到RoboVac
・RoboVac的算法:
评估主机应用程序的四元数以控制机器人运动
校准传感器误差(漂移)以保持精准导航
视需要命令机器人停止以重新校准
处理数据速率:1000Hz、200Hz和100Hz
・主机将机器人状态作为输入发送到RoboVac以进行潜在校准
・规格:≤ 10°/小时
・执行概述
初始校准只运行一次
每5~10分钟暂停一次
校准持续时间为1~2秒
校准期间会抑制运动
“尘盒已满”检测
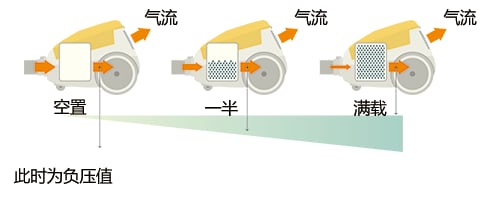
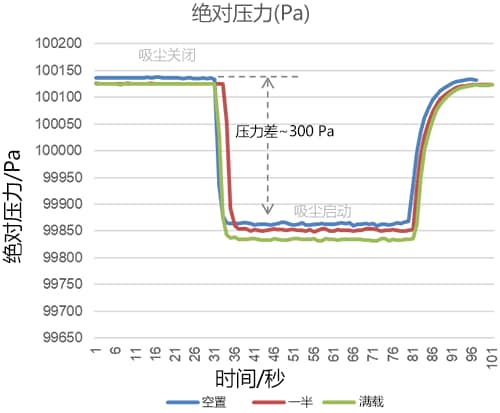
使用ICP-10101压力传感器监测尘盒中的气压气流,以此判断其中的灰尘水平。随着吸尘量的增加和过滤器被堵塞,气流会出现停滞,导致尘盒中的气压低于空置时的气压。为了消除暖通空调等局部环境因素的影响,以便更准确地检测尘盒内气压,我们建议测量差压,即同时用类似的压力传感器测量外部空气压力。
图 6:尘盒已满检测
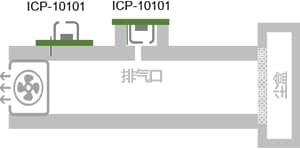

・使用压力传感器监测通过尘盒的气流;
・确定尘盒已满或过滤器被堵塞;
・可选择使用第二个压力传感器来消除暖通空调等局部环境影响,从而改进解决方案。
图7:评估结果ICP-10101
嵌入式电机控制器
TDK的HVC flex伺服驱动器系列可用于经济高效地控制高性能紧凑型电机。其中新型HVC4422F扩展了内存大小,能满足OEM诊断要求并能耐受高温环境。配备一体式MPU,满足RTOS要求。HVC控制器搭载32位CPU内核 (Arm Cortex-M3),能高性价比地应对机器人市场及其他市场(工业、消费品、仪器仪表等)日益增长的挑战。该产品的灵活外设可提供直接控制有刷、步进(双极或三相)或无刷 (BLDC) 电机的所有方法。
HVC系列还可选容量为32 KB (HVC4222/4223)或64 KB (HVC4420F/4422) 的闪存程序存储器,为代码开发、生产加速和系统内固件更新提供了高度灵活性。
图8:HVC的功能
适用于小型电机的完全集成的单片机电机控制解决方案MCU+驱动器
・ 可选有传感器或无传感器配置,能灵活控制步进、有刷和无刷直流电机;
・ 卓越性能,可实现复杂的控制方案;
・ 最大限度减少外部组件数量;
・ 支持系统诊断程序;
・ 缩短开发时间;
¬易于使用的开发工具和应用说明
¬完整的工作演示
¬获得汽车产品认证的专业固件包
¬易于配置并能在不同应用之间互用
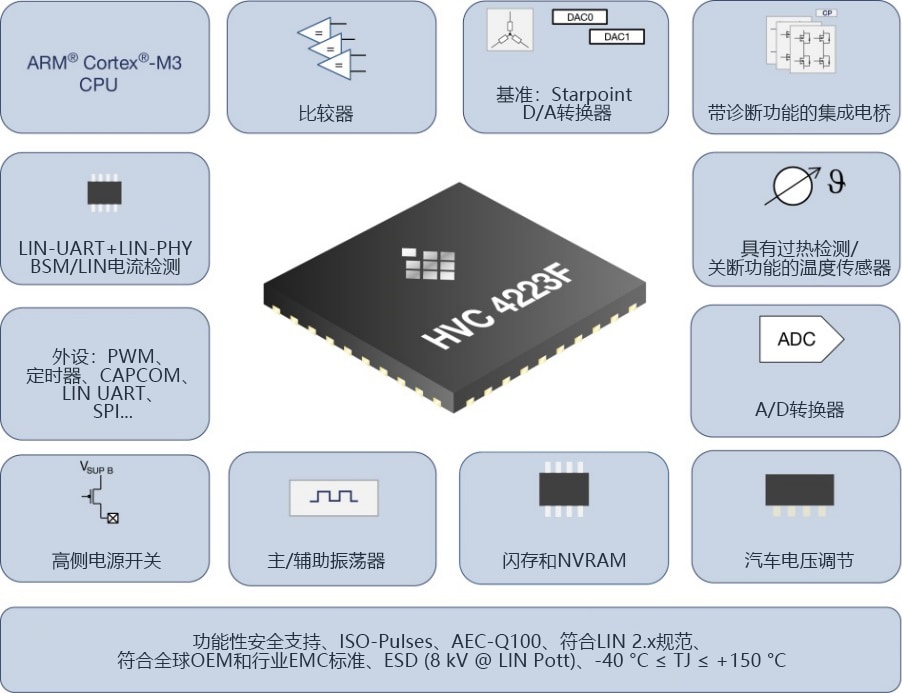
图9:框图 - 系统架构
| 产品 | 封装 | 订购代码 | 接口 | 温度范围: | 备注 |
|---|---|---|---|---|---|
| HVC 4222F | QFN40 | HVC4222F-DL | LIN, UART, SPI | -40°C - 160°C |
32k闪存, 2k RAM, TA = 150 °C |
| HVC 4223F | QFN40 | HVC4223F-DL | LIN, UART, SPI | -40°C - 150°C |
32k闪存, 2k RAM, TA = 125 °C |
| HVC 4420F | QFN40 | HVC4420F-DL | LIN, UART, SPI | -40°C - 150°C |
64k闪存, 4k RAM 集成MPU TA = 125 °C |
| HVC 4422F | QFN40 | HVC4422F-DL | LIN, UART, SPI | -40°C - 160°C |
64k闪存, 4k RAM 集成MPU TA = 150 °C |
机器人温度传感器
TDK的传感器广泛用于机器人技术中的温度监测应用,以保证各项功能的正常运行。
TDK可提供广泛的产品组合,为机器人应用提供高精度温度检测支持。
引线式NTC元件
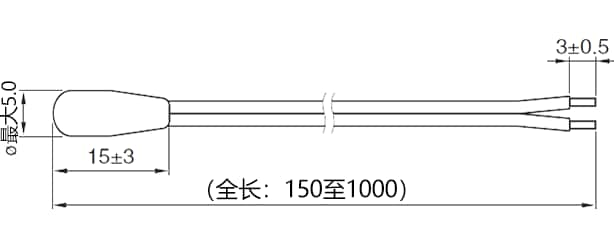
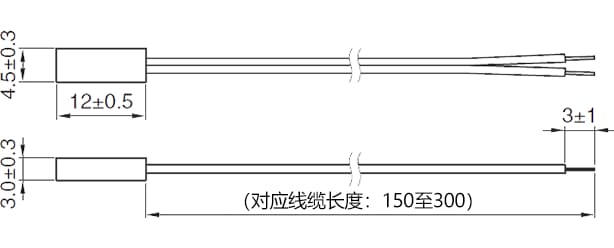
NTC元件采用高可靠性的玻璃封装,具有响应时间短的径向引线式和易于处理的刚性轴向引线式可供选择。 对于选项,还提供用于高绝缘性和防潮性的NTC探头,以及可简化安装过程的引线加工。
键合式NTC芯片
键合式NTC芯片设计用于半导体设备中,其引线键合能为机器人产品的固定电池和电机控制器充电。 这些传感器直接安装在智能功率模块中,用于监测功率半导体的结温。
图10:NTC热敏电阻产品概览
| 玻璃封装 | 树脂涂层 | 贴装 | |||
|---|---|---|---|---|---|
| 类型 | 径向引线式 | 轴向引线式 | 迷你传感器 | 新型迷你传感器 | 芯片 |
| 图片 |
 |
 |
 |
 |
 |
|
型号 (零件编号) |
G15*0/G15*1 (B575*0G1*/B575*1G1*) |
NTCDS/NTCDA /NTCDE/NTCDZ |
S864 (B57864S*) |
L862 (开发中) |
S860 (B57860S*) |
| 特点 |
响应时间超短 尺寸小 |
易处理的刚性引线 |
防潮性更好 响应时间短 |
无引线 温度容差小 优异的长期稳定性 良好的抗热震性 |
无引线 UL认证(E69802) 金属化顶部和底部表面(金或银) 有高耐温性等级 |
| 可选高温型号 | -40 °C 至 300 °C | -40 °C 至 250 °C | -55 °C 至 155 °C | -55 °C 至 155 °C | -40 °C 至 150 °C |
| 引线 |
Dumet合金线(铜包镍铁线) 可选玻璃体和引线涂层以满足电绝缘 (G15*1) 要求,最高温度可达260°C。 可选引线间距 |
镀镍CP线,可选镀Sn。 可选引线弯曲度(NTCDA、NTCDE) 可选绝缘或减少应力的涂层 (NTCDZ),最高温度可达160°C。 |
绝缘镀银镍线,AWG30。 | 绝缘镀银镍线 |
无引线 键合式NTC芯片 |
| 封装 | 散装、条形 | 折叠式编带 | 散装 | 散装、带装 |
编带装 (在8英寸框架上) |
多层片式NTC
SMD片式NTC非常适合板载温度检测和温度补偿应用,可选尺寸范围为3216到0402,可选导电胶安装型号。
>>点击可连接到片式NTC热敏电阻的选型指南
温度传感器组件/系统
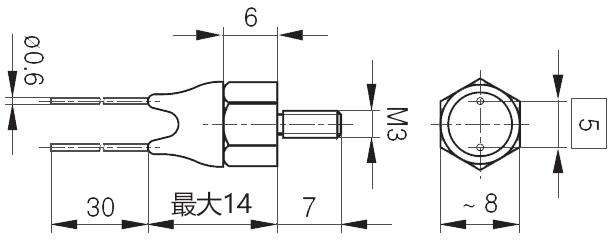
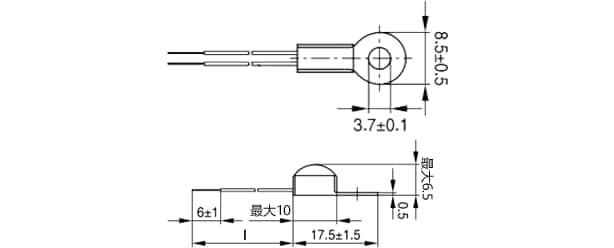
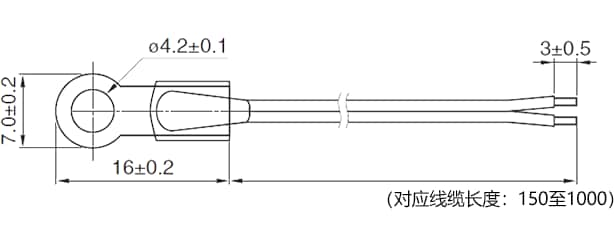
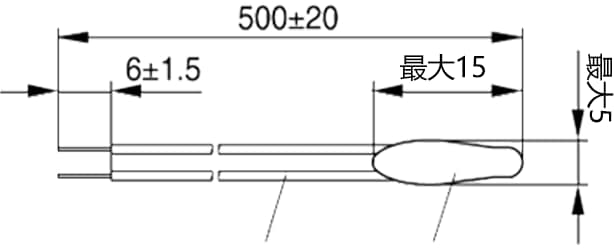
旋入式或螺口式传感器可轻松安装到专用组件上,是直接或间接通过机器人中的IGBT、电容器、线圈等散热器监测温度的成熟解决方案。空气温度传感器能可靠检测冷却空气温度并控制冷却风扇。
除了标准零件编号,我们还能定制NTC特性、引线长度/端子加工等,欢迎联系我们。
图11:NTC传感器组件/系统产品概览
| 旋入式传感器 | 螺口式传感器 | 空气温度传感器 | 封闭型传感器 | |||
|---|---|---|---|---|---|---|
| 型号 | K45 | M703/M1703 | NTCGP(片状端子) | M500 | NTCGP(树脂灌封) | NTCRP |
| 图片 |
 |
 |
 |
 |
 |
 |
| 特点 |
NTC热敏电阻采用旋入式铝制外壳封装 绝缘电压 Vins >2500Vac/1s 旋入式外壳可确保良好的热耦合(M3 螺纹) 镀锡铜引线 兼容RoHS指令 |
NTC热敏电阻采用带电缆出口的金属标签盒封装 绝缘电压 Vins > 2700 Vac/1s(可应要求提供更高选项) 金属标签可确保良好的热耦合 快捷的旋入式安装 兼容RoHS指令 |
NTC热敏电阻采用环氧树脂封装,带金属接线片端子 可使用紧固螺钉固定,能可靠检测安装面的温度 在静止油中的响应时间≤6秒 无引线 兼容RoHS指令 |
热敏电阻采用环氧树脂封装,并配备聚氯乙烯绝缘线 气流中的响应时间约为20秒 绝缘电压 Vins > 1250 Vac/1s 兼容RoHS指令 |
NTC 热敏电阻采用环氧树脂封装 镀锡平行聚氯乙烯绝缘线 在静止油中的响应时间≤6秒。 无引线 兼容RoHS指令 |
NTC热敏电阻封装采用玻璃封装,并配备小型树脂外壳 能在恶劣工况下可靠运行 工作温度高达200°C 无引线 兼容RoHS指令 |
| 温度范围 | -10 °C 至 +125 °C |
M703: -20°C 至 125°C M1703: -10°C 至 260°C (传感器头) |
-40 °C 至 +125 °C | -30 °C 至 +100 °C | -55 °C 至 +105 °C | -40 °C 至 +200 °C |
| 标准尺寸 |
 |
 |
 |
 |
 |
 |
RoboKit开发套件
作为一种新型开发套件,TDK RoboKit能无缝集成各种解决方案中,包括TDK专为机器人市场而设计的产品组合。RoboKit集成了主要的TDK产品,如ICM-42688-P 6轴惯性测量单元 (IMU)、ICP-10111电容式气压传感器、ICS-43434多模数字麦克风、CH101和CH201超声波飞行时间 (ToF) 传感器,以及Micronas 电机控制器、角度传感器和压力传感器。TDK提供的解决方案可满足机器人市场的严格要求,比如可提供导航精度<10°/小时的InvenSense IMU和RoboVac软件、Coursa Drive的市场就绪惯性导航系统 (INS)、能在任何照明条件下检测各种颜色障碍物的InvenSense超声波ToF传感器,可精准控制机器人关节的Micronas电机控制器,以及括温度传感器和磁力计。TDK RoboKit软件还与领先的操作系统ROS集成。现在,面向IMU和超声波距离传感器的ROS就绪驱动程序已经上市。
审核编辑:彭菁
-
传感器
+关注
关注
2578文章
55895浏览量
795843 -
人机交互
+关注
关注
12文章
1309浏览量
58231 -
麦克风
+关注
关注
16文章
703浏览量
58031 -
服务机器人
+关注
关注
9文章
598浏览量
54563 -
扫地机器人
+关注
关注
21文章
862浏览量
55958
发布评论请先 登录



评论