 ZC706千兆网测试
ZC706千兆网测试

初学FreeRTOS
(1)使用ZC706开发板测试PS端网口(Echo,lwIP协议栈);
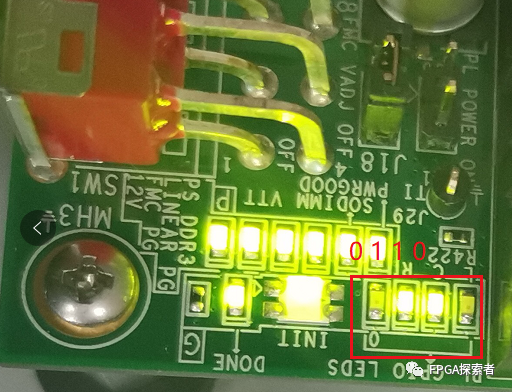
(2)配合操作PL端LED(直接驱动和使用消息队列两种方式);
(3)PS端串口UART打印调试信息;
(4)QSPI固化(Dual Quad SPI Parallel 8 bit模式)。
ZC706中,MAC 控制器与 PHY 通过 RGMII(Reduced Gigabit Media Independent Interface)接口进行连接,实现千兆网。
一、工程概述
1. 开发板配置
使用Xilinx ZYNQ开发板ZC706,默认配置ARM后即可使用PS端网口、串口和QSPI,放置AXI GPIO的IP核驱动PL端的4个LED。
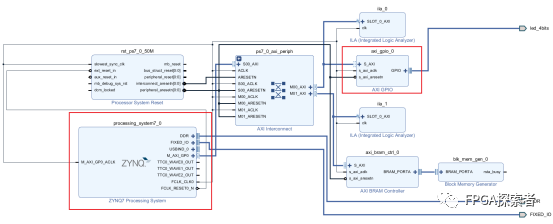
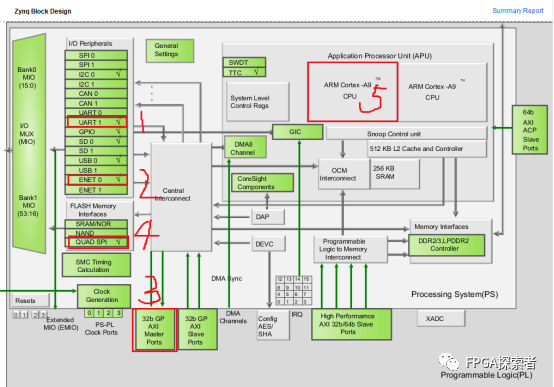
ARM端配置如下图所示,以5处的ARM-A9为核心,使用1处的UART1打印调试信息,使用2处的网口0进行以太网通信,使用3处的AXI GP(General Port)Master通用主设备接口连接PL端的AXI GPIO,最后使用4处的QSPI固化程序,烧录Boot文件。
2. SDK程序
上述工程综合、布局布线并生成bit流后,导出硬件。
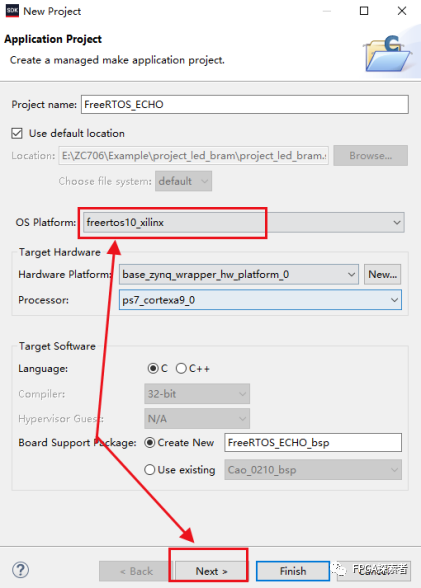
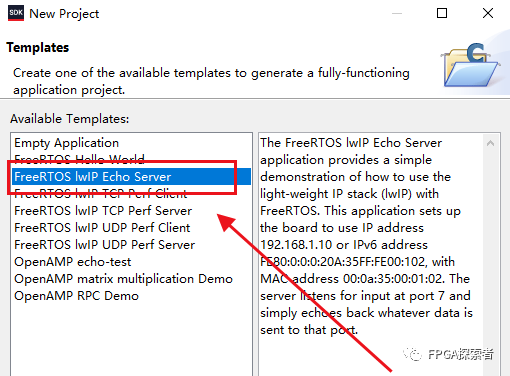
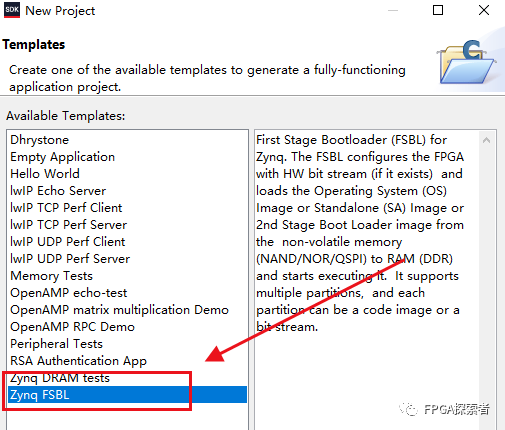
新建应用工程Application Project,选择 OS Platform 平台为 freertos10_xilinx (Vivado及SDK版本2018.2,低版本的可能是freertos9_xilinx),选择Next,选中“ FreeRTOS lwIP Echo Server ”。
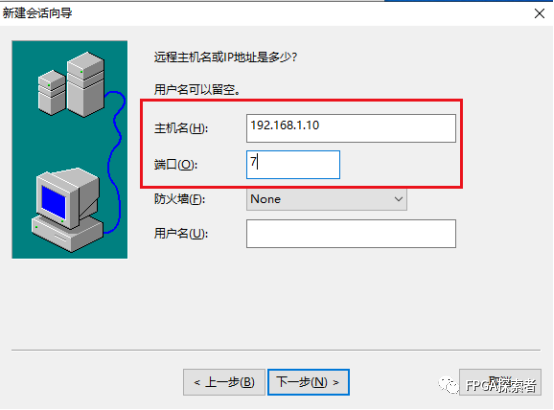
新建完成后,即可进行最基础的网络通信了。这里注意,默认设置的是DCHP动态主机配置协议,需要开发板和电脑都连接到一个路由器上。如果直接使用网线连接开发板和电脑,则启用 IPv4 协议,默认配置的IP地址为192.168.1.10,子网掩码255.255.255.0,网关196.128.1.1,如果想要更改默认配置,可以在main.c文件的main_thread()主线程中修改,如下所示:
xil_printf("ERROR: DHCP request timed out\\r\\n");
xil_printf("Configuring default IP of 192.168.1.10\\r\\n");
IP4_ADDR(&(server_netif.ip_addr), 192, 168, 1, 10);
IP4_ADDR(&(server_netif.netmask), 255, 255, 255, 0);
IP4_ADDR(&(server_netif.gw), 192, 168, 1, 1);
LWIP 是一个小型开源的 TCP/IP 协议栈,支持IPv4、IPv6、TCP、UDP、DHCP等。
•IGMP 协议,用于网络组管理,可以实现多播数据的接收
•Internet 协议(IP),包括 IPv4 和 IPv6,支持 IP 分片与重装,包括通过多个网络接口的数据包转发
•用于网络维护和调试的 Internet 控制消息协议(ICMP)
•用户数据报协议(UDP)
•传输控制协议(TCP)拥塞控制,往返时间(RTT)估计,快速恢复和重传
•DNS,域名解析
•SNMP,简单网络管理协议
•动态主机配置协议(DHCP)
•以太网地址解析协议(ARP)
•AUTOIP,IP 地址自动配置
•PPP,点对点协议,支持
3. 网络设置
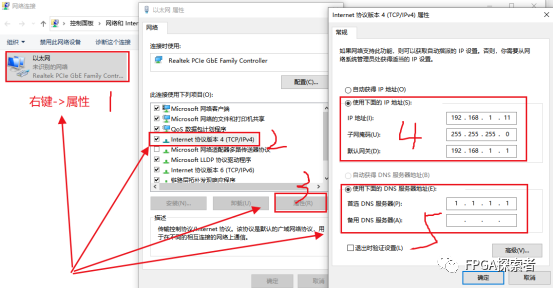
使用网线直接连接ZC706开发板和计算机网口,配置计算机IP地址为192.168.1.11,子网掩码255.255.255.0,网关192.168.1.1,其中IP地址的最后一处可以更改为其他值,但是不能和开发板的相同。

4. 开启监听测试
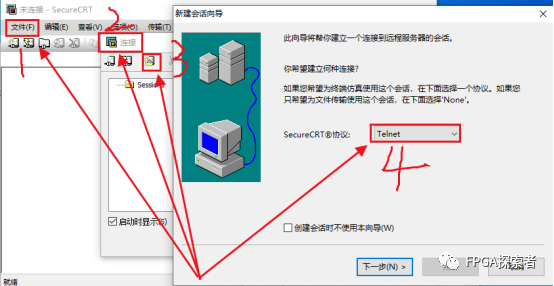
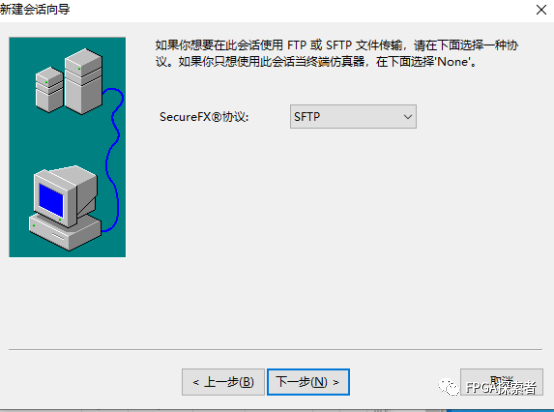
使用SecureCRT软件监听,除此之外,使用其他网口助手也可以。
二、工程测试
1. 测试Echo官方例程
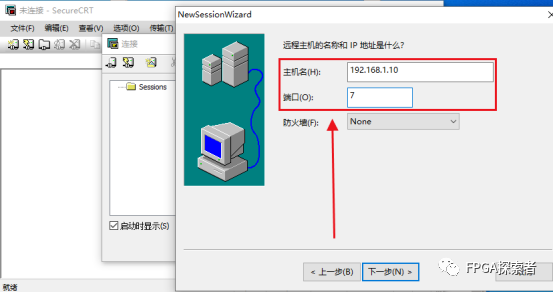
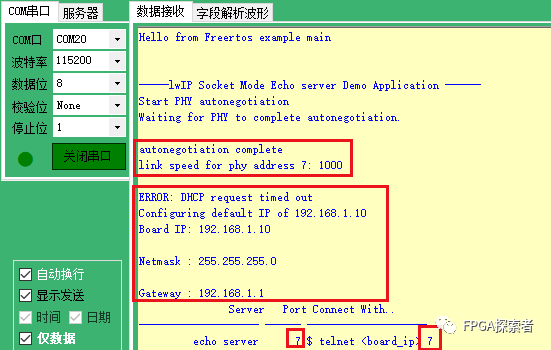
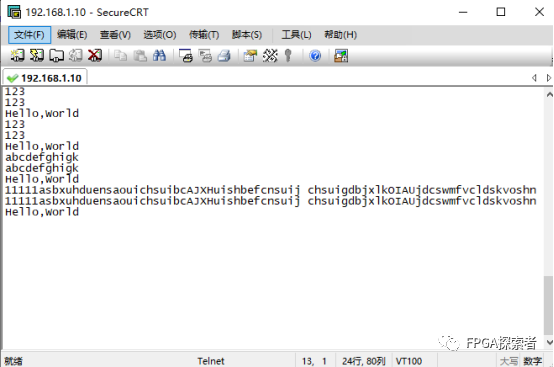
先打开串口,波特率115200,下载官方例程到ZC706开发板,连接SecureCRT_CN,初始化工程中串口打印信息如下:配置DCHP动态主机协议超时,自动转为IPv4,将板子的IP地址配置为192.168.1.10,子网掩码255.255.255.0,网关192.168.1.1,使用端口7。
在SecureCRT_CN界面输入字符或字符串,回车,通过网口向开发板发送数据,开发板会返回同样的数据,测试正确。
2. 分析源码
2.1 main函数
打开main.c文件,找到main()函数。在main函数中创建了一个线程,传入的参数依次为 线程名(调试用)、函数指针、函数需要的参数、需要的堆栈大小、优先级 。
按照如下配置,调用了main_thread函数,不需要传参(用0或NULL),堆栈大小由#define定义为1024,优先级为2。
int main()
{
sys_thread_new("main_thrd", (void(*)(void*))main_thread, 0,
THREAD_STACKSIZE,
DEFAULT_THREAD_PRIO);
vTaskStartScheduler();
while(1);
return 0;
}
2.2 main_thread函数
此函数中实现的功能如下:
(1)初始化lwip协议栈;lwip_init();
(2)调用network_thread()创建线程;
(3)调用echo_application_thread()创建线程;
每500ms检测一次DHCP是否成功,若成功则创建echo应用线程,如果10秒还没有成功,则启用IPv4,配置IP地址、子网掩码和网关后,创建echo应用程序;创建成功后退出while,配置完成;
while (1) {
vTaskDelay(DHCP_FINE_TIMER_MSECS / portTICK_RATE_MS);
if (server_netif.ip_addr.addr) {
xil_printf("DHCP request success\\r\\n");
print_ip_settings(&(server_netif.ip_addr), &(server_netif.netmask), &(server_netif.gw));
print_echo_app_header();
xil_printf("\\r\\n");
sys_thread_new("echod", echo_application_thread, 0,
THREAD_STACKSIZE,
DEFAULT_THREAD_PRIO);
break;
}
mscnt += DHCP_FINE_TIMER_MSECS;
if (mscnt >= 10000) {
xil_printf("ERROR: DHCP request timed out\\r\\n");
xil_printf("Configuring default IP of 192.168.1.10\\r\\n");
IP4_ADDR(&(server_netif.ip_addr), 192, 168, 1, 10);
IP4_ADDR(&(server_netif.netmask), 255, 255, 255, 0);
IP4_ADDR(&(server_netif.gw), 192, 168, 1, 1);
print_ip_settings(&(server_netif.ip_addr), &(server_netif.netmask), &(server_netif.gw));
/* print all application headers */
xil_printf("\\r\\n");
xil_printf("%20s %6s %s\\r\\n", "Server", "Port", "Connect With..");
xil_printf("%20s %6s %s\\r\\n", "--------------------", "------", "--------------------");
print_echo_app_header();
xil_printf("\\r\\n");
sys_thread_new("echod", echo_application_thread, 0,
THREAD_STACKSIZE,
DEFAULT_THREAD_PRIO);
break;
}
}
2.3 echo_application_thread函数
位置:echo.c文件。
(1)创建socket,绑定端口,监听;
(2)调用process_echo_request函数创建线程;
此函数需要传入参数。
while (1) {
if ((new_sd = lwip_accept(sock, (struct sockaddr *)&remote, (socklen_t *)&size)) > 0) {
sys_thread_new("echos",
process_echo_request,
(void*)new_sd,
THREAD_STACKSIZE,
DEFAULT_THREAD_PRIO);
}
}
2.4 process_echo_request函数
位置:echo.c文件, 用户需要注意的最重要的函数,发送和接收的移植全部在这个函数 。
(1)接收数据,最大数据长度2048,char 类型,存储在recv_buff 数组中,若接收出错,打印错误信息并退出while;
(2)若接收到的数据的前4个字符为quit,则退出while;
(3)将接收到的数据发送出去;
void process_echo_request(void *p)
{
int sd = (int)p;
int RECV_BUF_SIZE = 2048;
char recv_buf[RECV_BUF_SIZE];
int n, nwrote;
while (1) {
/* read a max of RECV_BUF_SIZE bytes from socket */
if ((n = read(sd, recv_buf, RECV_BUF_SIZE)) < 0) {
xil_printf("%s: error reading from socket %d, closing socket\\r\\n", __FUNCTION__, sd);
break;
}
/* break if the recved message = "quit" */
if (!strncmp(recv_buf, "quit", 4))
break;
/* break if client closed connection */
if (n <= 0)
break;
/* handle request */
if ((nwrote = write(sd, recv_buf, n)) < 0) {
xil_printf("%s: ERROR responding to client echo request. received = %d, written = %d\\r\\n",
__FUNCTION__, n, nwrote);
xil_printf("Closing socket %d\\r\\n", sd);
break;
}
}
/* close connection */
close(sd);
vTaskDelete(NULL);
}
3. 测试网口发送数据
由2.4可知,在process_echo_request函数中更改发送即可。新增一个字符数组:
char tx_buf[16]={'H','e','l','l','o',',','W','o','r','l','d','\\r','\\n'};
在发送完接收到的数据后,新增一个发送函数,即可发送tx_buf数组,长度为16:
write(sd, tx_buf, 16);
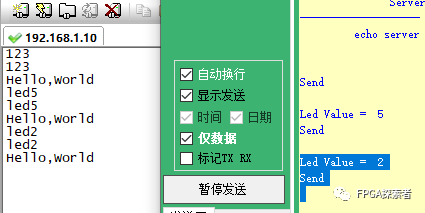
4. 测试网口接收数据并控制LED
在向开发板发送数据时,规定一组特殊数据,如“led0”、“led5”、“led8”等,前3个字符“led”用于指示这部分数据是用于控制LED的,第4个字符表示点亮组合,四个LED使用二进制编码数据为0~15, 注意,这里发送的是ASCII字符,在控制LED时需处理成数字(减 ’0’) 。
接收到数据后,仿照函数中对quit字符串的处理方式,新增一个处理,将接收到的字符串与字符串“led”比较,如果收到的字符串的前3个字符是“led”,则使用第4个字符控制LED的亮灭。
strncmp 函数, 字符串比较函数,字符串大小的比较以ASCII 码表上的顺序来决定。函数声明为 int strncmp ( const char * str1, const char * str2, size_t n ) ,把 str1 和 str2 进行比较,最多比较前 n 个字节,若str1与str2的前n个字符相同,则返回0;若s1大于s2,则返回大于0的值;若s1 小于s2,则返回小于0的值。
if (!strncmp(recv_buf, "led", 3)) {
XGpio_DiscreteWrite(&Gpio_Led, 1, recv_buf[3]-'0');
xil_printf("Led Value = %d\\r\\n", recv_buf[3]-'0');
}
5. 测试LED任务及消息队列
**5.1 **包含头文件,声明队列
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "timers.h"
QueueHandle_t xQueue = NULL;
**5.2 **在main函数中创建消息队列
传入两个参数,分别为队列长度和队列中每个元素的长度,xQueueCreate(1,1) 表示队列长度为1,队列中的每个元素时一个char类型数据,xQueueCreate(2,15) 表示队列长度为2,每个元素都是一个char[15]类型的字符数组。
xQueue = xQueueCreate(1,1);
/* Check the queue was created. 检查队列是否创建成功*/
configASSERT( xQueue );
**5.3 **在main函数中创建LED任务,接收队列消息
xTaskCreate( prvPlLedTask,
( const char * ) "PL Led",
configMINIMAL_STACK_SIZE,
NULL,
tskIDLE_PRIORITY + 1,
NULL);
其中,调用的prvPlLedTask定义如下,每次从队列中读取一个char类型的数据,若队列为空则等待,若队列不为空则读出后控制LED,注意这里的rece_led_value一定要加取地址符号&,表示传入指针,否则出错。
static void prvPlLedTask( void *pvParameters )
{
const TickType_t x1second = pdMS_TO_TICKS( DELAY_1_SECOND );
char rece_led_value;
for( ;; )
{
xil_printf( "PL LED task\\r\\n" );
xQueueReceive( xQueue, /* The queue being read. */
&rece_led_value, /* Data is read into this address. */
portMAX_DELAY ); /* 延时 */
xil_printf( "PL LED task\\r\\n" );
xil_printf( "rece_led_value = %d\\r\\n", rece_led_value-'0' );
XGpio_DiscreteWrite(&Gpio_Led, 1, rece_led_value-'0');
/* Delay for 1 second. */
vTaskDelay( x1second );
}
}
**5.4 **在process_echo_request中添加发送队列消息
若满足条件,则将对LED的控制信息写入队列,注意要加取地址符号&。
if (!strncmp(recv_buf, "led", 3)) {
xQueueSend( xQueue,
&recv_buf[3],
0UL );
}
三、程序固化
1. 新建FSBL工程
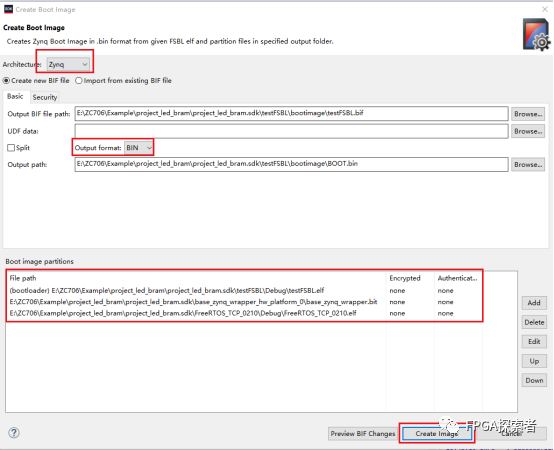
2. 生成Boot镜像文件
生成工程后,右键“Create Boot Image”,依次添加FSBL工程的elf(默认已添加)、工程的bit文件(默认已添加)、需固化的程序elf(Add找到路径添加),“Create Image”。
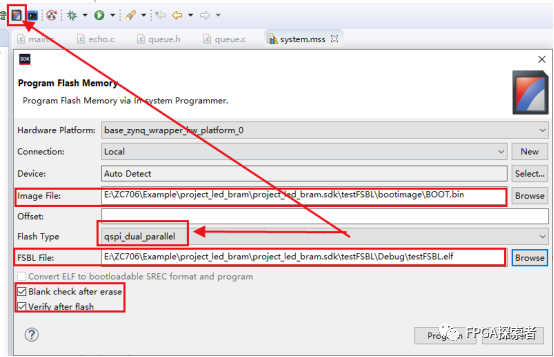
3. 烧录QSPI Flash
选择Image和FSBL的路径,对Flash, 一定选择“qspi_dual_parallel” , 若选择“qspi_single”也能下载成功,但是无法加载,ZC706板载指示灯亮红灯 。
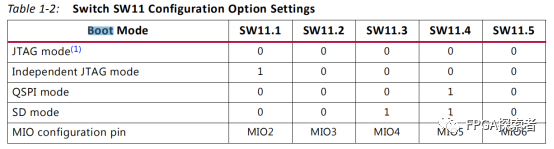
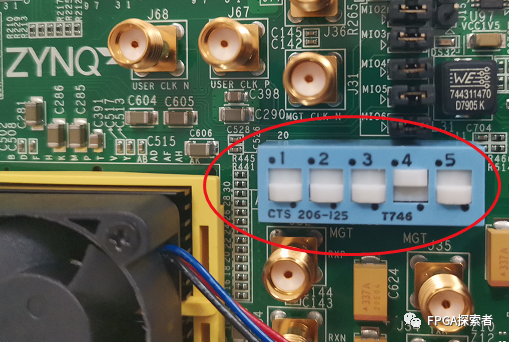
4. 配置启动模式
-
led灯
+关注
关注
22文章
1607浏览量
112113 -
ARM处理器
+关注
关注
6文章
361浏览量
43393 -
PHY
+关注
关注
2文章
341浏览量
54357 -
GPIO
+关注
关注
16文章
1334浏览量
56484 -
MAC控制器
+关注
关注
0文章
6浏览量
2752
发布评论请先 登录
请问如何基于赛灵思ZC706和AD9361平台验***PSK调制解调?
Vivado板文件找不到ZC706
可以在具有多个ZC706评估板的多台计算机上使用一个FLEX许可证吗
PL DDR是否在ZC706 cachealbe中?
ZC706开发板的SI5324配置方法
为什么zc706的速度等级会有不同?
在ZC706上运行Qt GUI时黑屏
如何解决ZC706轨电压现象?
Vivado 2016.1无法在ZC706中运行?
zc706板和主机PC之间的PCI Express如何进行通信
ZC706评估套件怎么看到数据显示?
如何在ZC706中实现千兆网配置?

Zynq-7000全可编程SoC ZC706评估套件(ISE Design Suite 14.5)入门指南

ZC706千兆网测试(ZYNQ,FreeRTOS,Echo,lwIP,TCP,RGMII)




评论