 SDT1-028K压电薄膜传感器实现机器人手势远程控制
SDT1-028K压电薄膜传感器实现机器人手势远程控制

大家好,我是【广州工控传感★科技】SDT1-028K压电薄膜传感器事业部,张工。
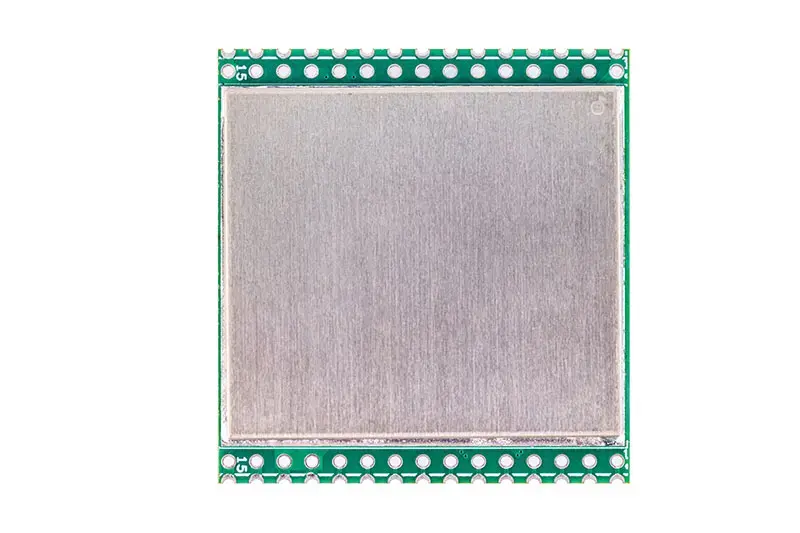
SDT1-028K压电薄膜传感器包含一个与塑胶壳相连的矩形压电薄膜元件和一根18英寸长的同轴电缆线,薄膜元件上下两层丝印银浆,然后对折,形成一个自屏蔽的工作区域,用在高EMI环境。SDT1-028K可用双面胶,环氧胶和氰基丙烯酸盐粘结剂粘贴到其他表面上,当移去传感器时,双面胶可能会将薄膜上的金属镀层撕掉。当以某种方式将SDT1粘贴到某个面上时,它可以作为一个性能优良的接触传声器和动态应力计,其输出信号能直接被示波器(优选10MΩ)或者信号分析器接收到。

SDT1-028K
交互式人机界面使人类能够控制硬件并收集反馈信息,是人与机器之间的桥梁,近年来受到广泛关注和快速发展。在iHMI中,柔性压力传感器和弯曲角度传感器被认为是机器人和手势识别等应用中最重要的组件。当这些传感器集成到iHMI中以模拟人体皮肤的综合特性时,它们需要始终覆盖在人体上,即使使用集成的类皮肤电池或自持电源。 然而,传统的电压电PZT和AlN基压力传感器由于其高制造温度和固有的脆性而与柔性基板不兼容,难以实现弯曲测量。关于SDT1-028K压电传感器弯曲检测的报道大多是定性测量,只判断是否有弯曲,而对弯曲角度的定量检测很少。因此,在iHMI中实现具有自驱动能力的弯曲角度的定量测量仍然是一个巨大的挑战。

SDT1-028K
SDT1-028K压电薄膜传感器的协同压电效应和聚合物柔韧性,这种PES表现出优异的弯曲灵敏度(4.4mV deg-1),角度范围从44°到122°,快速响应时间为76ms,并具有良好的机械稳定性。此外,PES可以在弯曲和按压模式下工作,具有0.33 V kPa-1的超高压灵敏度,响应时间为16 ms。与iHMI集成后,PES可自适应覆盖不同曲面,实现准确的弯曲角度记录和快速识别,实现智能人机交互。在此基础上,通过与人手同步动作,成功实现了机器人手的遥控应用。这种基于CPZNs的自供电PES在结构和基本机制上是独一无二的,

基于CPZN的自供电PES的结构设计。(a) 应用于iHMI领域开发的智能传感器示意图。(b) 装置,(c) NFs薄膜和(d) 单跟NF的示意图。(e) 弯曲模式下传感器的照片。(f)NF的SEM图像。(g) 单跟NF的TEM图像。(h) FEM模拟的结果。(i) 基于PES的机器人手机遥控器的应用。

PES的CPZN的表征。(a) PVDF/ZnO柔性传感器制造过程。PVDF/ZnO中 ZnO含量为(b)0wt%,(c) 1wt%,(d) 3wt%,(e) PVDF/ZnO 5wt%的SEM图像。(f) PVDF/ZnO NFs的元素分布图。(g) PVDF/ZnO NFXRD图。(h) PVDF/ZnO NFs的拉曼光谱。(i) PVDF/ZnO NF的FTIR光谱。
设计的PES的电气特性。(a) 压力模型下PES的测量示意图。0.35 N ~ 8.75 N不同力下PES的开路电压(b)和短路电流(c)的关系。(d) 不同作用力下一周期开路电压的放大图。(e) 压力模型中PES的升降次数。(f) 压力为4.67 kPa的重复加压/减压条件下的PES在5000次循环下的力学耐久性试验。(g) 显示弯曲模型下PES测量的示意图。不同的角度(φ)范围从122°到44°,PES的开路电压(h) 和短路电流 (i) 关系。(j) 不同角度下增加开路电压。(k) 弯曲模型中的PES的上升/下降时间。(l) 角度为97°持续5000次循环重复弯曲/不弯曲条件下,PES的机械耐久性试验。

设计的PES在iHMI中的应用。(a) 检测PES握把力量的照片。(b) 不同握把强度下PES的短路电流输出。(c) 放置在书中的PES检测开/合书角度的照片。(d) PES在关闭阶段(红色区域)和开启阶段的短路电流输出(蓝色区域)。(e) 一种人机遥控系统示意图,采用几个简单的电气模块实现手势远程控制。(F) 基于PES的手势远程控制的应用。
展示了其作为用于压力传感和弯曲运动监测的灵活自供电SDT1-028K压电薄膜传感器的应用。 所制备的PES可以在压力和弯曲条件下工作,无需外接电源,具有良好的柔韧性和高灵敏度。 通过将人类手指的脉冲信号无线传输到机器人手掌,进一步成功实现了自供电实时手势遥控系统。 更重要的是,PES的卓越性能使其易于集成到测量系统中。
-
传感器
+关注
关注
2577文章
55506浏览量
793964 -
机器人
+关注
关注
213文章
31444浏览量
223669
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
浊度高、干扰多、测距难:2026泳池机器人传感器优选的ToF供应商
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
安森美传感器芯片创新突破机器人感知边界
什么是WiFi远程控制模块?技术特点和应用场景有哪些?
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
Ethernet ip转SPI嵌入式板卡-让机器人与单片机互相联动
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)

机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
盘点割草机器人六大避障传感器
0.01°微小变化精准捕捉,机器人姿态传感器革新




评论