 小凌派-RK2206开发板:智慧车载
小凌派-RK2206开发板:智慧车载

一、简介
智慧车载模块是一款集超声波测距以及报警电路的模块。模块可提供2cm-300cm的非接触式距离感测功能,测距精度可达2cm,能将测量距离转化为具有一定宽度的脉冲输出;声光报警电路由外部控制,当外部处理器判断距离达到预警设定值时,控制报警电路工作。
智慧车载模块目前只是一个简单的车距测试模块,随着它的功能逐步完善,其发展的方向将更加宽广。比如:智慧车载模块可完善成为智能车载资通讯电子系统,车辆自动/辅助驾驶系统、驾驶人瞌睡警示、防撞预警、车载自我诊断系统(On Board Diagnostics,OBD)、胎压检测装置(TPMS)、车道偏离警示系统(LWDS)、前方碰撞预警系统(FCWS)及后方碰撞预警系统等智慧车(Smart Car)相关应用。
本文基于瑞芯微RK2206芯片 + LiteOS操作系统,通过gpio控制智慧车载E53模块,实现智慧车载模块和开发板的互相通信功能。
二、硬件电路设计
1.整体硬件电路设计
智慧车载模块硬件电路如图1所示,电路中包含了E53接口连接器,EEPROM存储器、超声波处理电路和声光报警电路。
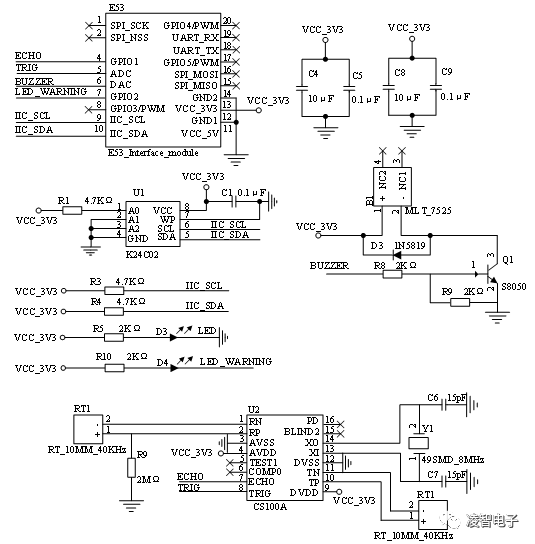
图1 硬件电路图
超声波测距芯片,选用CS-100A,其是一款工业级超声波测距芯片,内部集成超声波发射电路,超声波接收电路,数字处理电路等,单片即可完成超声波测距,测距结果通过脉宽的方式进行输出。
CS100A配合使用40KHz的开放式超声波探头,在超声波发射端并联一个电阻R2到地和8MHz的晶振,即可实现高性能的测距功能,电阻R2的大小决定了超声波测量的距离。
三极管Q1为NPN管,基极为高电平时,三极管才能够导通,蜂鸣器需PWM波驱动,人耳可识别的频率范围为20Hz-20KHz,故PWM频率需在该范围内,我们默认使用3KHz的PWM波驱动。
小凌派-RK2206开发板与智慧车载模块均带有防呆设计,故很容易区分安装方向,直接将模块插入到开发板的E53母座接口上即可,安装如图2所示。
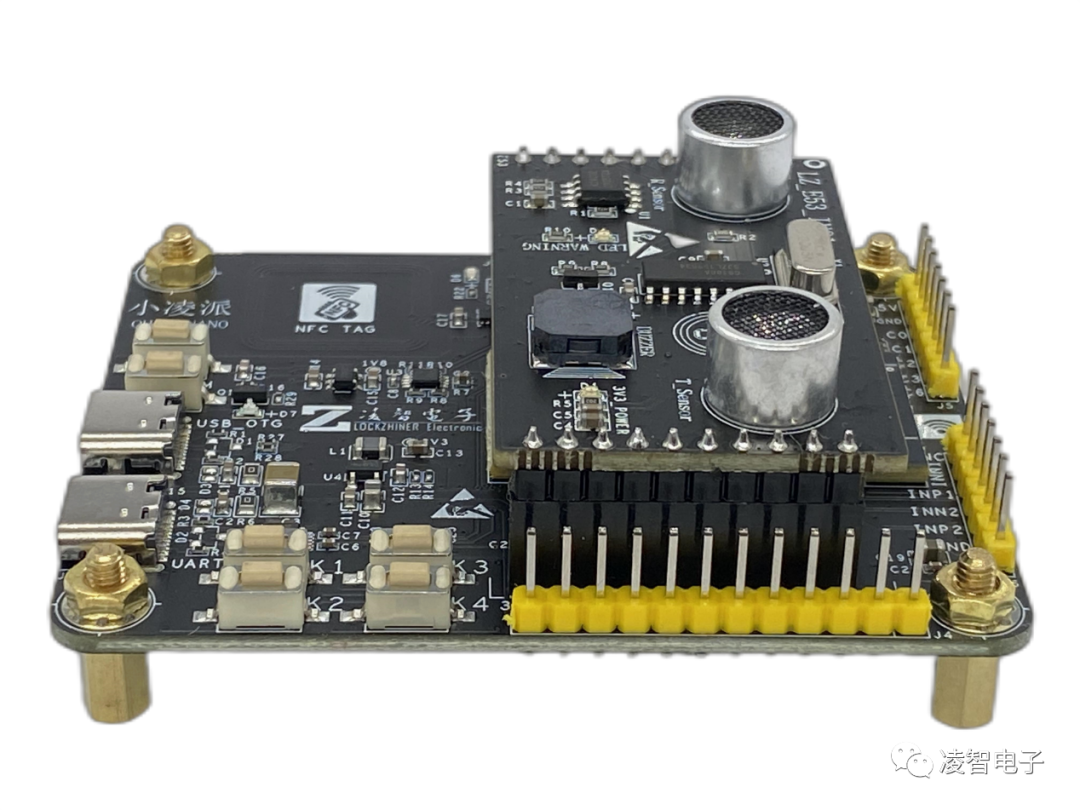
图2 硬件连接图
2.智慧车载电路设计
硬件资源图如下所示:
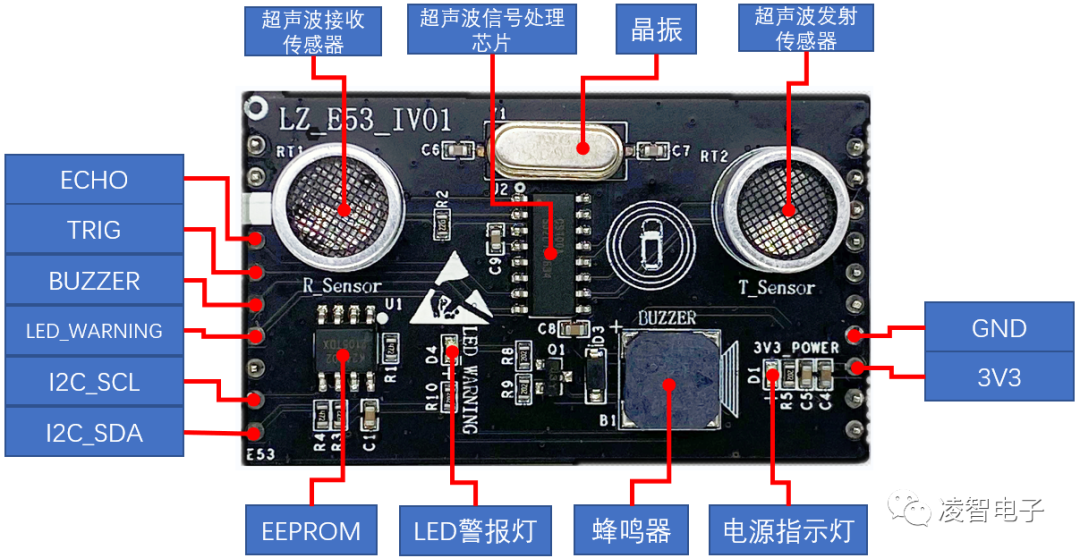
引脚名称开发者可在硬件资源图中查看,也可在智慧车载模块背面查看。
| 引脚名称 | 功能描述 |
| ECHO | 测距脉宽输出,高电平的宽度表示超声波往返时间差 |
| TRIG | 测距出发,输入10us的高电平脉冲,E53模块开始测距 |
| BUZZER | 蜂鸣器控制 |
| LED_Warning | LED控制线,低电平有效 |
| I2C_SCL | I2C时钟信号线 |
| I2C_SDA | I2C数据信号线 |
| GND | 电源接地引脚 |
| 3V3 | 3.3V电源输入引脚 |
| GND | 电源接地引脚 |
三、程序设计
本实验使用智慧车载模块模拟智慧车载测距应用。超声波模块发送并接收信号,通过发射和接收信号的时间差来计算实际测量的距离;当测量的距离小于预先设置的阈值时,驱动蜂鸣器报警,点亮告警LED灯。
1. 主程序设计
如图6.3.3所示,为智慧车载主程序流程图,开机LiteOS系统初始化后,进入主程序先初始化智慧车载模块。程序进入主循环,采用轮询的方式,2秒测量一次距离,当测量到的距离小于等于20厘米时,控制蜂鸣器响,告警灯亮起;当测量到的距离大于20厘米时,蜂鸣器不响应,告警灯熄灭。
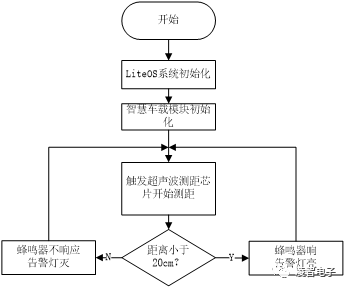
图6.3.3 主程序流程图
{
unsigned int ret = 0;
/* 每个周期为200usec,占空比为100usec */
unsigned int duty_ns = 500000;
unsigned int cycle_ns = 1000000;
float distance_cm = 0.0;
/*智慧车载模块初始化*/
e53_iv01_init();
while (1)
{
/*获取智慧车载模块测量的距离*/
ret = e53_iv01_get_distance(&distance_cm);
if (ret == 1)
{
printf("distance cm: %f\n", distance_cm);
/*距离小于等于20cm,开启蜂鸣器告警,点亮LED告警灯;
否则,关闭蜂鸣器,熄灭LED告警灯*/
if (distance_cm <= 20.0)
{
e53_iv01_buzzer_set(1, duty_ns, cycle_ns);
e53_iv01_led_warning_set(1);
}
else
{
e53_iv01_buzzer_set(0, duty_ns, cycle_ns);
e53_iv01_led_warning_set(0);
}
}
LOS_Msleep(2000);
}
}
2. 初始化程序设计
智慧车载初始化程序主要分为IO初始化和PWM设备初始化两部分。
IO初始化程序主要设置GPIO0_PC4为输出模式,作为超声波测距Trig控制管脚;设置GPIO0_PA5为输出模式,作为LED_WARNING告警灯控制管脚;设置GPIO_PA2为输入模式,作为超声波测距Echo控制管脚。
{ /* Trig引脚设置为GPIO输出模式 */ PinctrlSet(E53_IV01_TRIG_GPIO, MUX_FUNC0, PULL_KEEP, DRIVE_KEEP); LzGpioInit(E53_IV01_TRIG_GPIO); LzGpioSetDir(E53_IV01_TRIG_GPIO, LZGPIO_DIR_OUT); E53_IV01_TRIG_Clr(); /* LED告警灯引脚设置为GPIO输出模式 */ PinctrlSet(E53_IV01_LED_WARNING_GPIO, MUX_FUNC0, PULL_KEEP, DRIVE_KEEP); LzGpioInit(E53_IV01_LED_WARNING_GPIO); LzGpioSetDir(E53_IV01_LED_WARNING_GPIO, LZGPIO_DIR_OUT);e53_iv01_led_warning_set(0);
/* Echo引脚设置为GPIO输入模式 */ PinctrlSet(E53_IV01_ECHO0_GPIO, MUX_FUNC0, PULL_KEEP, DRIVE_KEEP); LzGpioInit(E53_IV01_ECHO0_GPIO); LzGpioSetDir(E53_IV01_ECHO0_GPIO, LZGPIO_DIR_IN);
}
初始化PWM7设备,使用PWM7作为蜂鸣器的控制源。
{ /* 初始化pwm */ PinctrlSet(E53_IV01_BUZZER_GPIO, MUX_FUNC2, PULL_DOWN, DRIVE_KEEP); PwmIoInit(m_buzzer_config); LzPwmInit(E53_IV01_PWM_IO); return 0;}
3. 距离测量程序设计
发送至少10us的高电平给智慧车载,触发其开始工作;等待200ms,整个测距最长为66ms,获取Echo管脚的电平,当高电平时获取一个时间戳,当低电平时再获取一个时间戳,两个时间戳的差值即为超声波测距所产生的时间。
{ uint8_t value = 0; m_echo_info.flag = EECHO_FLAG_CAPTURE_RISE;
while (1) { LzGpioGetVal(E53_IV01_ECHO0_GPIO, &value); if (value == LZGPIO_LEVEL_HIGH) { m_echo_info.time_rise = *m_ptimer5_current_value_low; m_echo_info.flag = EECHO_FLAG_CAPTURE_FALL; break; } }
while (1) { LzGpioGetVal(E53_IV01_ECHO0_GPIO, &value); if (value == LZGPIO_LEVEL_LOW) { m_echo_info.time_fall = *m_ptimer5_current_value_low; m_echo_info.flag = EECHO_FLAG_CAPTURE_SUCCESS; break; } }
/* 释放信号量 */ LOS_SemPost(m_task_sem);}
获得超声波测距的时间后,通过公式计算距离,计算公式:距离 = 时间差 * 340米/秒 / 2 * 100厘米/米
{ float f_time = (float)time; float f_freq = (float)freq; /* 距离 = 时间差 * 340米/秒 / 2(超时波来回2次) * 100厘米/米 */ *cmeter = f_time / f_freq * 170.0 * 100.0;}
四、编译过程
1、搭建和下载源代码
我已将OpenHarmony源代码上传到Gitee社区中,大家可以根据以下网址下载。
https://gitee.com/Lockzhiner-Electronics/lockzhiner-rk2206-openharmony3.0lts
注意:编译环境可根据以下网址来操作:https://gitee.com/Lockzhiner-Electronics/lockzhiner-rk2206-openharmony3.0lts/blob/master/vendor/lockzhiner/rk2206/README_zh.md
2、打开sdk下面路径的文件
/vendor/lockzhiner/rk2206/samples/c4_e53_intelligent_vehicle_01 /e53_intelligent_vehicle_01_example.c
3、修改编译脚本
修改 vendor/lockzhiner/rk2206/sample 路径下 BUILD.gn 文件,指定 e53_iv01_example 参与编译。
"./c4_e53_intelligent_vehicle_01:e53_iv01_example",
修改 device/lockzhiner/rk2206/sdk_liteos 路径下 Makefile 文件,添加 -le53_iv01_example 参与编译。
hardware_LIBS = -lhal_iothardware -lhardware -le53_iv01_example
3、编译固件
hb set -root .hb sethb build -f
4、烧写固件
请参考Gitee网址的说明手册(“烧录打印”章节):https://gitee.com/Lockzhiner-Electronics/lockzhiner-rk2206-openharmony3.0lts/blob/master/device/rockchip/README_zh.md
五、实验结果
程序编译烧写到开发板后,按下开发板的RESET按键,通过串口软件查看日志如下;智慧车载模块超声波探头正对着墙壁进行测距,移动模块到不同的距离,当测量的距离小于等于20厘米时,蜂鸣器响起,告警灯亮起;当测量的距离大于20厘米时,蜂鸣器不响应,告警灯熄灭。
========== E53 IV Example ==========distance cm: 23.89========== E53 IV Example ==========distance cm: 23.90
好了,今天的课程就到这里,我们下次再见!
-
开发板
+关注
关注
26文章
6439浏览量
121243
发布评论请先 登录
【飞凌嵌入式RV1126B开发板试用体验】初识飞凌嵌入式RV1126B开发板试
技术贴|如何在【RK3588】ELF 2开发板上部署小龙虾OpenClaw

飞凌精灵(ElfBoard)技术贴|如何在ELF-RK3506开发板上实现GPIO复用

OpenHarmony开发开源资料!凌蒙派-RK3568开发板:从入门到实战的全栈硬件平台

【超值首选!仅88元】ELF-RK3506开发板限时优惠震撼来袭

性能跃迁,鸿蒙开发新纪元!凌羽派RK3566鸿蒙开发板,开启全场景开发之旅


如何移植EtherCAT Igh--基于米尔RK3576开发板
RK3506开发板Linux开发板极致性价比之选

RK3568开发板暗藏32位兼容开关?飞凌嵌入式带你一键解锁!


睿擎派RK3506J开发板开箱记录、初步调试





评论