 我们又改了一版机器人的脖子
我们又改了一版机器人的脖子

什么是机器人的脖子
机器人的脖子,一般是这样的:
Robot Fedor

Robot Reachy
Robot Digit

以上三种形态,一种是串联二自由度,一种是并联二自由度,要么就是完全没有脖子。
“机器人的脖子”实际上就是搭载在机器人躯干上的传感器云台。
根据机器人执行的任务不同,通常我们会在机器人头部配置不同类型的传感器,例如多线激光、面阵激光、深度摄像头等。
而这些传感器本身由于视角有限的原因,往往需要通过云台这种方式去扩展机器人的感知范围。
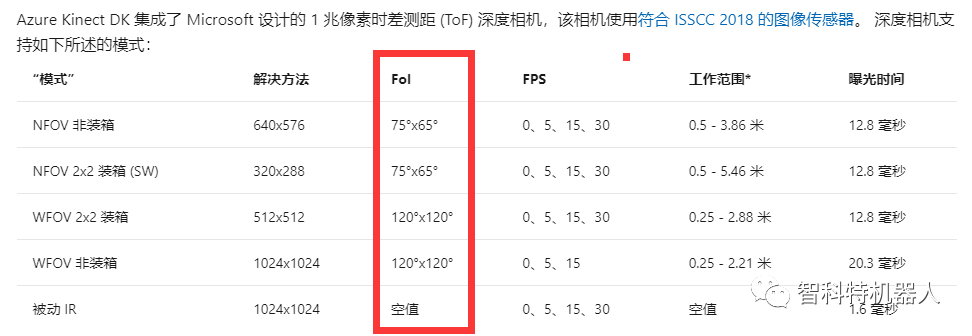
Kinect DK参数
而一款能搭载多种传感器,兼容ROS的传感器的云台就显得那么的必要了!
所以为了解决问题,我们智科特工程师连夜迭代了三版云台,如今第三版终于进入了规模量产环节!
 为什么要做一款传感器云台
为什么要做一款传感器云台
客户需求强烈
产品源于需求而又高于需求。
很多客户都跟我们提过,想要一款价格便宜量又足的机器人云台,但是现在市面上的云台产品,要么不开源(不兼容ROS),要么负载不够,要么价格太贵。当时一个项目上,客户需要旋转和俯仰Kinect2,于是我们的宗义师兄就做了一个最初版,后来陆陆续续有客户需要,就继续迭代下去了,最近刚完成第三版的量产。
国外的产品太贵
以性价比为基准,卷到国外去!
这种传感器云台的产品也不是没有,很早之前FLIR就有PTU系列,也开放API接口,但是价格好像两三万一个,秉承着“钱不能都让他们挣了,我们也要做一个卷到国外去”的想法,怎么也要让我们同胞在考虑云台的时候有选择的余地。

FLIR PTU云台
迭代的路径



我们到现在一共迭代了三版,第一版把初步功能实现,第二版改进了对称结构,优化了量产能力。第三版整体体积进行了缩小,负载增大,往量产又走了一步。
在完成第二版的时候,我们就用这个产品做了许多应用,比如:双臂机器人头部、移动机器人感知模块等。第二版的云台陆陆续续卖了五十多套,然后启动的第三版改版。
 第三代云台参数表:
第三代云台参数表:
| 参数 | 值 |
| 运动范围 | 旋转:±60°,俯仰:±60° |
| 控制精度 | 0.05° |
| 最大运动速度 | 30°/s |
| 功耗 | 工作:15w,待机:0.3w |
| 通信接口 | USB Type-c,RS485 |
| 电源输入 | 12V 2A(DC 5.5×2.1) |
| 整机质量 | 1.1kg |
| 设计负载 | 1kg |
| 尺寸 | 140×70×117mm |
| 包装尺寸 | 243×152×91mm |
-
机器人
+关注
关注
213文章
31455浏览量
223688
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
工业机器人与协作机器人概念不同




评论