 机器人+3D视觉:高效精准的手眼组合,加速多场景智造升级
机器人+3D视觉:高效精准的手眼组合,加速多场景智造升级

在全球产业转型加速,少人化趋势以及政策倾斜综合影响下,机器人作为自动化、无人化应用的通用智能载体,凭借提升工作效率、降低劳力成本等优势,高效替代了传统行业机械重复、高强度、招工难的工作,落地愈发增量扩面。
随着机器人+应用走进更多场景,让机器人摆脱机械固定模式限制,智能、柔性、交互的需求越发普遍。配天机器人与图漾科技基于双方多年在工业机器人、3D机器视觉领域长期积累所建立的各自优势,在产品应用和解决方案协同层面,组合打造快速柔性部署、便捷维护、更具创新价值的手眼协同解决方案,在智能制造、物流快递等多行业多场景应用上实现批量落地,共同为终端用户带来降本增效提质等实际服务价值。
机器人+3D视觉,手眼相应如虎添翼
配天机器人是专注于工业机器人、核心零部件及行业自动化的解决方案提供商。机器人核心零部件包括控制系统、伺服驱动、伺服电机等全部自主研发,且拥有强大的核心软件技术和算法,可提供机器人控制系统解决方案、成套柔性制造设备及系统、机器人应用行业自动化解决方案。公司工业机器人产品负载范围涵盖3至 280公斤,在3C、制造业、汽车、橡胶及塑料制品、玻璃、食品、医药工程、机械等多行业领域批量应用。
图漾科技(Percipio.XYZ)是全球领先的3D机器视觉供应商,为工业和行业应用提供高性价比的3D工业相机和配套软件,通过与多行业集成商、设备商合作伙伴深度合作,共同打造完整的3D视觉行业解决方案,推进多行业智能化、自动化升级。
应用案例 / 3D视觉引导标准拆垛
随着纸箱、周转箱、泡沫盒、软包等作为众多行业日常必不可少的物流载体,客户希望通过智能机器人+3D视觉实现自动化的拆垛拆包应用来提升拆垛效率。
客户场地有限、SKU众多、物料更新迭代的实施难点。来源不同、用处不同的包装箱,本身尺寸/包装/摆放差异(软包、透明材质、反光胶/扎带、码放散乱/堆叠遮挡等)等复杂问题,同时零物损保证货物安全。
方案简介:配天机器人X图漾科技3D视觉引导标准拆垛,主要由配天AIR50-2230机械臂、图漾FM/P系列3D工业相机硬件和拆垛专用视觉软件RVS-SE组成,基于深度学习技术及内置超级模型,免去样本训练,快速获取纸箱/软包的机器人引导信息,无需示教编程,自动规划机器人运行轨迹,高效进行拆垛。
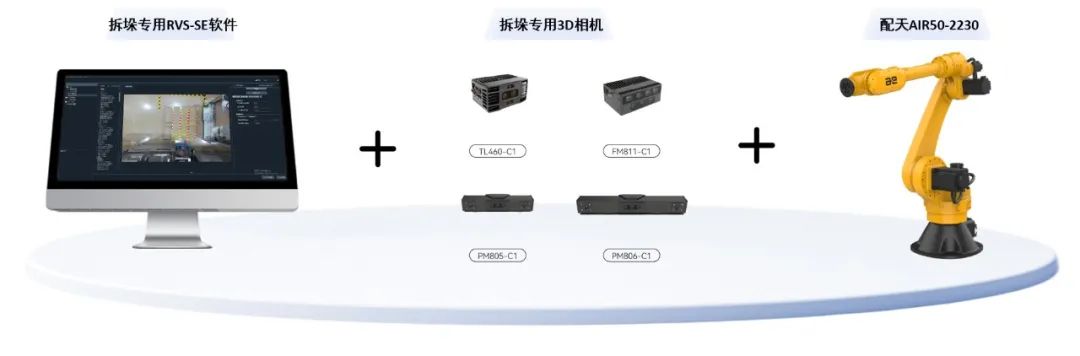
核心组件
配天机器人AIR50-2230:高速度、高精度、高稳定性,有效载荷50KG,IP67工业防护等级
图漾拆垛专用RVS-SE软件:自主研发专用软件,内置超级模型,免去样本训练环境,无代码拖拽搭建项目流程,对工程师无专业技术背景要求,一天培训即可上手,支持二次开发及客户系统集成
图漾拆垛专用3D相机:图漾多系列3D工业相机,工业级防护等级,支持严苛环境下长时间稳定连续工作,优化光学设计,实现对高亮、高反、黑色物体识别
应用优势
智能路径规划:运动零碰撞,在存在复杂干扰(空间狭小、货物支架、行人等)情况下实时调整运动轨迹,避免物损
精准快速取放:最佳Z向精度控制±3mm;每节拍视觉处理视觉≤2s(采图->计算->输出坐标);精准达到99.9%
敏捷部署运维:标准化方案,可快速完成安装部署,无需空间改造,高效部署快速启用,调试运维简单
低成本高回报:更高性价比,可智能稳定的自动完成长时间高强度工作,替代1-3名力工,更多长效产出效益
应用案例 / 3D视觉引导工件分拣
客户之前使用人工进行圆柱形工件的分拣操作时,枯燥重复时间长,且人工具有较大的主观性易疲劳,准确度较低,无法满足更高的精度要求,存在物损情形,且一条流水线需要安排多位检验员,也进一步的加大了工厂的人工成本。
客户希望通过自动化工位改造,通过3D视觉引导机器人自动从料框中分拣工件,解决黑色吸光、满框装载、紧密码放、圆柱体定位、夹具-料框-工件之间碰撞等问题并保证零物损等,完成快速上料操作。
方案简介:配天机器人X图漾科技3D视觉引导标准拆垛,主要由配天AIR50-2230机械臂、图漾FM/P系列3D工业相机硬件和拆垛专用视觉软件RVS-SE组成,基于深度学习技术及内置超级模型,免去样本训练,快速获取纸箱/软包的机器人引导信息,无需示教编程,自动规划机器人运行轨迹,高效进行拆垛。

核心组件
配天机器人AIR10-1420:一流的运动速度,高达 ±0.02mm 的重复定位精度。有效载荷10KG,满足高节拍需求
图漾RVS软件:成熟的低代码机器视觉开发平台,免费授权+图形化流程+仿真可视+可二次开发及系统集成,内置大量智能算法,大幅降低开发难度,便捷调参升级及部署维护,缩短项目开发周期
图漾3D工业相机:图漾多系列3D工业相机,工业级防护等级,支持严苛环境下长时间稳定连续工作,优化光学设计,实现对高亮、高反、黑色物体的高精度定位识别
应用优势
智能路径规划:基于运动路径及避障策略,确保抓取点位精准同时,对末端执行器运动路径合理规划,规避碰撞情形,避免物损
精准快速取放:最佳Z向精度控制±1-2mm;每节拍之视觉处理视觉≤3s(采图->计算->输出坐标);精准达到99.9%
柔性易拓展:基于3D视觉主动识别来料,可兼容多规格,根据生产及订单变化调整物流,快速导入样本,高效部署方便运维
少人化效益:减少工位及人员安排,降低劳动成本及管理成本
应用案例 / 3D视觉引导自动供包
随着全球电商购物蓬勃发展,百万件/日订单处理的超大型分拣中心模式日益普及,而传统人工供包模式招工难、人力成本高、劳动密集难以管理、工作时间受限等情况,难以满足高分拣效率的客观需求。自动供包随之成为了当下电商物流包裹分拣的主流应用。
项目之前,终端客户主要依靠人工方式来完成供包上件,招工难、大量消耗劳动力且效率低下且成本较高,因此选择引进自动化应用。考虑到基于单件分离的全自动供包方案则结构复杂、现场改造成本高、运行能耗大(大量电机和皮带),异常情况维修难度高、投入产出周期长等不确定风险,客户希望能在尽量避免场地改造、不干扰现场作业情况下,实现模块化、低成本、部署简单快速、方便管理维护的自动供包应用。

方案简介:配天机器人X图漾科技3D视觉自动供包,主要由配天机械臂、图漾3D工业相机FM851和配套软件组成,以3D视觉搭载机械臂形式,替代单个人工供包台应用,模块化安装、一键启用的3D工业相机,体积小对现有场地改动极少,功耗低在没有包裹时几乎不消耗电力,工业级满足全天候连续稳定工作。在单个供包台出现异常情况下,不会造成整个分拣线停运,且维护简单方便。
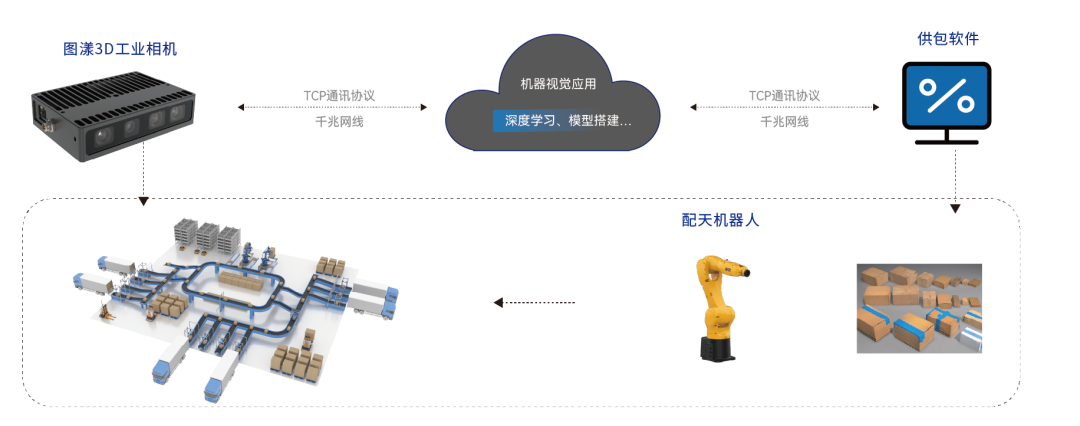
核心组件
配天机器人:一流的运动速度,满足高节拍需求
配套软件:通过高效的2D/3D视觉算法和深度学习算法引导机器人,实现对无序堆放快递包裹的全时高效抓取,减少包裹物损,提升抓取成功率
图漾3D工业相机:图漾多系列3D工业相机,工业级防护等级,支持严苛环境下长时间稳定连续工作,兼容快递包裹外包装存在胶带反光、超大型件(卡住)、异型件、黑色材质、叠件等干扰情形下的精准识别
应用优势
智能路径规划:零碰撞运动路径规划策略,最大限度避免了包裹破损、卡件等异常情形,减少人工干预
指标表现优异:供件效率≥1500pph、机械手抓取成功率≥99%、供件上双率≤1.5‰、供件后面单识别率≥99% 、NC 件剔除成功率≥99.99%
全时自动化:全大幅提升供包效率,实现少人化分拣作业模式及降本增效目标
部署简单,即装即用:场地占用极少,无需空间改造, 模块化免维护,一键启用
高性价比,投资回收期短:大幅减少人工成本,具备整体更优的采购、使用性价比
审核编辑 :李倩
-
机器人
+关注
关注
213文章
31470浏览量
223699 -
伺服驱动
+关注
关注
4文章
103浏览量
18342 -
3D视觉
+关注
关注
4文章
491浏览量
29318
原文标题:机器人+3D视觉:高效精准的手眼组合,加速多场景智造升级
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
一径科技NZ系列广角全场景3D激光雷达全面赋能商用清洁机器人
3D视觉引导拆码垛:一文读懂“机器眼”如何指挥机器人搬货?

机器人拆码垛中高精度放置与垛型构建的解析分析:技术路径与核心要素
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
基于3D视觉引导的移动式复合机器人设计:智能自动化革命的核心技术

2025 3D机器视觉的发展趋势

中国科学院研发3D手型微纳机器人
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
奥比中光领跑韩国机器人3D视觉市场
iTOF技术,多样化的3D视觉应用
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
普渡科技推出3D感知AI扫地机器人PUDU MT1 Max
基于NVIDIA AI的3D机器人感知与地图构建系统设计



评论