 ROS操作系统学习笔记1
ROS操作系统学习笔记1

入门脉络主要由几个部分组成,包括:ros简介、ros文件系统、ros通信架构、常用工具、roscpp和rospy。
这篇文章先写ros简介、ros文件系统,预计后天更新ros通信架构,后续后出一版本完整版本文章。
ROS简介
机器人操作系统(Robot operating system ,ROS)是一个应用于机器人上的基础框架,它把原本松散的零部件耦合在一起,提供通信的架构,近似上ROS是一个中间件。
ros上手简单适合研究,但是商用缺点明显。主要是实时通信性能有限,系统稳定差。
ROS误解
ROS不是一门编程语言,主要代码由C++编写,客户端可以使用python\\java等多种语言编写
ROS不仅仅是一个函数库,除了客户端库,还包含中心服务器.
ROS文件系统
认识ROS首先要知道ROS工程的组织架构,了解各个文件的功能和作用,才能高效的开发和编程。
这里面包含catkin编译系统,catkin工作空间结构,package软件包结构,重要的cmakelists.txt、package.xml文件内容。
-
catkin编译系统
catkin编译系统底层仍然是linux gcc/g++ 只是为了提高编译效率、简化工程管理衍生的,如果有比catkin编译效率更好的软件出现,catkin一样会被替代。
-
一个catkin软件包必须包含两个文件:package.xml(package描述信息),CMakeList.txt(构建package所需的cmake文件列表)。
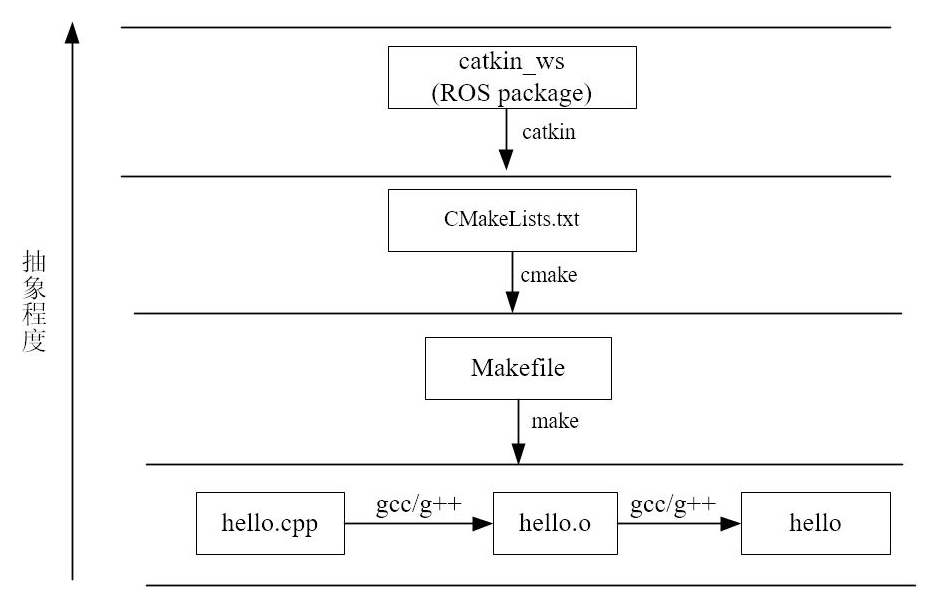
catkin工作原理:
-
当在工作空间(必须切换到workspace_base否则编译不会成功)敲下catkin_make指令后,编译器首先在当前工作空间./src下递归查找每一个ROS package.
-
package 中会有package.xml和CMakeList.txt文件,catkin编译系统依据CMakeList.txt文件,从而生成makefiles(放在./build/).
-
然后make build目录的makefiles文件,编译链接生成可执行文件放在./devel.
所以说catkin就是将cmake和make指令做了一个封装,从而完成整个编译过程的工具。
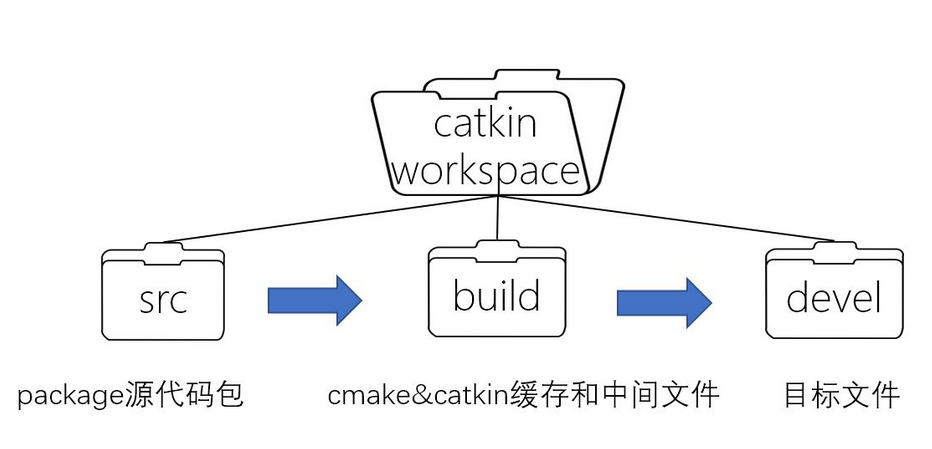
- catkin工作空间
catkin的工作空间结构,它包含了src、build、devel 三个文件夹主要作用如下:
src/: ROS的catkin软件包(源代码包)
build/: catkin(CMake)的缓存信息和中间文件
devel/: 生成的目标文件(包括头文件,动态链接库,静态链接库,可执行文件等)、环境变量
gaocancan@ubuntu:~$ mkdir -p catkin_test/src
gaocancan@ubuntu:~$ cd catkin_test
gaocancan@ubuntu:~/catkin_test$ catkin_make
Base path: /home/gaocancan/catkin_test
Source space: /home/gaocancan/catkin_test/src
Build space: /home/gaocancan/catkin_test/build
Devel space: /home/gaocancan/catkin_test/devel
Install space: /home/gaocancan/catkin_test/install
Creating symlink "/home/gaocancan/catkin_test/src/CMakeLists.txt" pointing to "/opt/ros/kinetic/share/catkin/cmake/toplevel.cmake"
####
####
Running command: "cmake /home/gaocancan/catkin_test/src
-DCATKIN_DEVEL_PREFIX=/home/gaocancan/catkin_test/devel
-DCMAKE_INSTALL_PREFIX=/home/gaocancan/catkin_test/install -G Unix
Makefiles" in "/home/gaocancan/catkin_test/build"
####
-- The C compiler identification is GNU 5.4.0
-- The CXX compiler identification is GNU 5.4.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /home/gaocancan/catkin_test/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/kinetic
-- This workspace overlays: /opt/ros/kinetic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.12", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/gaocancan/catkin_test/build/test_results
-- Found gtest sources under '/usr/src/gmock': gtests will be built
-- Found gmock sources under '/usr/src/gmock': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.12")
-- Looking for pthread.h
-- Looking for pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /home/gaocancan/catkin_test/build
####
#### Running command: "make -j4 -l4" in "/home/gaocancan/catkin_test/build"
####
gaocancan@ubuntu:~/catkin_test$ tree
.
├── build
│ ├── atomic_configure
│ │ ├── env.sh
│ │ ├── local_setup.bash
│ │ ├── local_setup.sh
│ │ ├── local_setup.zsh
│ │ ├── setup.bash
│ │ ├── setup.sh
│ │ ├── _setup_util.py
│ │ └── setup.zsh
│ ├── catkin
│ │ └── catkin_generated
│ │ └── version
│ │ └── package.cmake
│ ├── catkin_generated
│ │ ├── env_cached.sh
│ │ ├── generate_cached_setup.py
│ │ ├── installspace
│ │ │ ├── env.sh
│ │ │ ├── local_setup.bash
│ │ │ ├── local_setup.sh
│ │ │ ├── local_setup.zsh
│ │ │ ├── setup.bash
│ │ │ ├── setup.sh
│ │ │ ├── _setup_util.py
│ │ │ └── setup.zsh
│ │ ├── order_packages.cmake
│ │ ├── order_packages.py
│ │ ├── setup_cached.sh
│ │ └── stamps
│ │ └── Project
│ │ ├── interrogate_setup_dot_py.py.stamp
│ │ ├── order_packages.cmake.em.stamp
│ │ ├── package.xml.stamp
│ │ └── _setup_util.py.stamp
│ ├── CATKIN_IGNORE
│ ├── catkin_make.cache
│ ├── CMakeCache.txt
│ ├── CMakeFiles
│ │ ├── 3.5.1
│ │ │ ├── CMakeCCompiler.cmake
│ │ │ ├── CMakeCXXCompiler.cmake
│ │ │ ├── CMakeDetermineCompilerABI_C.bin
│ │ │ ├── CMakeDetermineCompilerABI_CXX.bin
│ │ │ ├── CMakeSystem.cmake
│ │ │ ├── CompilerIdC
│ │ │ │ ├── a.out
│ │ │ │ └── CMakeCCompilerId.c
│ │ │ └── CompilerIdCXX
│ │ │ ├── a.out
│ │ │ └── CMakeCXXCompilerId.cpp
│ │ ├── clean_test_results.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── cmake.check_cache
│ │ ├── CMakeDirectoryInformation.cmake
│ │ ├── CMakeError.log
│ │ ├── CMakeOutput.log
│ │ ├── CMakeRuleHashes.txt
│ │ ├── CMakeTmp
│ │ ├── download_extra_data.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── doxygen.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── feature_tests.bin
│ │ ├── feature_tests.c
│ │ ├── feature_tests.cxx
│ │ ├── Makefile2
│ │ ├── Makefile.cmake
│ │ ├── progress.marks
│ │ ├── run_tests.dir
│ │ │ ├── build.make
│ │ │ ├── cmake_clean.cmake
│ │ │ ├── DependInfo.cmake
│ │ │ └── progress.make
│ │ ├── TargetDirectories.txt
│ │ └── tests.dir
│ │ ├── build.make
│ │ ├── cmake_clean.cmake
│ │ ├── DependInfo.cmake
│ │ └── progress.make
│ ├── cmake_install.cmake
│ ├── CTestConfiguration.ini
│ ├── CTestCustom.cmake
│ ├── CTestTestfile.cmake
│ ├── gtest
│ │ ├── CMakeFiles
│ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ ├── gmock.dir
│ │ │ │ ├── build.make
│ │ │ │ ├── cmake_clean.cmake
│ │ │ │ ├── DependInfo.cmake
│ │ │ │ ├── depend.make
│ │ │ │ ├── flags.make
│ │ │ │ ├── link.txt
│ │ │ │ ├── progress.make
│ │ │ │ ├── src
│ │ │ │ └── usr
│ │ │ │ └── src
│ │ │ │ └── gtest
│ │ │ │ └── src
│ │ │ ├── gmock_main.dir
│ │ │ │ ├── build.make
│ │ │ │ ├── cmake_clean.cmake
│ │ │ │ ├── DependInfo.cmake
│ │ │ │ ├── depend.make
│ │ │ │ ├── flags.make
│ │ │ │ ├── link.txt
│ │ │ │ ├── progress.make
│ │ │ │ ├── src
│ │ │ │ └── usr
│ │ │ │ └── src
│ │ │ │ └── gtest
│ │ │ │ └── src
│ │ │ └── progress.marks
│ │ ├── cmake_install.cmake
│ │ ├── CTestTestfile.cmake
│ │ ├── gtest
│ │ │ ├── CMakeFiles
│ │ │ │ ├── CMakeDirectoryInformation.cmake
│ │ │ │ ├── gtest.dir
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ ├── gtest_main.dir
│ │ │ │ │ ├── build.make
│ │ │ │ │ ├── cmake_clean.cmake
│ │ │ │ │ ├── DependInfo.cmake
│ │ │ │ │ ├── depend.make
│ │ │ │ │ ├── flags.make
│ │ │ │ │ ├── link.txt
│ │ │ │ │ ├── progress.make
│ │ │ │ │ └── src
│ │ │ │ └── progress.marks
│ │ │ ├── cmake_install.cmake
│ │ │ ├── CTestTestfile.cmake
│ │ │ └── Makefile
│ │ └── Makefile
│ ├── Makefile
│ └── test_results
├── devel
│ ├── cmake.lock
│ ├── env.sh
│ ├── lib
│ ├── local_setup.bash
│ ├── local_setup.sh
│ ├── local_setup.zsh
│ ├── setup.bash
│ ├── setup.sh
│ ├── _setup_util.py
│ └── setup.zsh
└── src
└── CMakeLists.txt -> /opt/ros/kinetic/share/catkin/cmake/toplevel.cmake
43 directories, 123 files
-
机器人
+关注
关注
213文章
30580浏览量
219567 -
耦合
+关注
关注
13文章
605浏览量
102540 -
操作系统
+关注
关注
37文章
7328浏览量
128627 -
ROS
+关注
关注
1文章
290浏览量
18474
发布评论请先 登录
嵌入式Linux操作系统学习规划
UCOSII操作系统的简介
ROS是什么?机器人操作系统ROS的介绍

ROS的含义与机器人操作系统ROS的介绍
机器人操作系统ROS详细介绍
嵌入式系统学习笔记

51操作系统学习笔记(三):建立一个属于自己的AVR的RTOS(1)
51操作系统学习笔记(四):建立一个属于自己的AVR的RTOS(2)
ROS基本介绍

ROS操作系统学习笔记2
ROS操作系统学习笔记3





 工商网监
工商网监
评论