 PID调节那些事
PID调节那些事

搞自动化的人,许多人对如何整定PID参数感到比较迷茫。这个东西其实一点都不高深,上过初中的人,只要受过严格训练,都可以成为整定参数的好手。什么?初中生理解积分微分的原理么?恩,初中生没有学过微积分,可是一旦你给他讲清楚微积分的物理意义,然后认真训练判断曲线的习惯和能力,完全可以掌握好PID的参数整定。
什么是PID
要弄清楚怎样定量之前,我们先要理解一个最基本的概念:调节器。调节器是干什么的?调节器就是人的大脑,就是一个调节系统的核心。任何一个控制系统,只要具备了带有PID的大脑或者说是控制方法,那它就是自动调节系统。如果没有带PID的控制方法呢?那可不一定不是自动调节系统,因为后来又涌现各种控制思想。比如时下研究风头最劲的模糊控制,以前还有神经元控制等等;后来又产生了具有自组织能力的调节系统,说白了也就是自动整定参数的能力;还有把模糊控制,或者神经元控制与PID结合在一起应用的综合控制等等。在后面咱们还会有介绍。咱们这个文章,只要不加以特殊说明,都是指的是传统的PID控制。可以这样说:凡是具备控制思想和调节方法的系统都叫自动调节系统。而放置最核心的调节方法的东西叫做调节器。
基本的调节器具有两个输入量:被调量和设定值。被调量就是反映被调节对象的实际波动的量值。比如水位温度压力等等;设定值顾名思义,是人们设定的值,也就是人们期望被调量需要达到的值。被调量肯定是经常变化的。而设定值可以是固定的,也可以是经常变化的,比如电厂的AGC系统,机组负荷的设定值就是个经常变化的量。
基本的调节器至少有一个模拟量输出。大脑根据情况运算之后要发布命令了,它发布一个精确的命令让执行机构去按照它的要求动作。在大脑和执行机构(手)之间还会有其他的环节,比如限幅、伺服放大器等等。有的限幅功能做在大脑里,有的伺服放大器做在执行机构里。
上面说的输入输出三个量是调节器最重要的量,其它还有许多辅助量。比如为了实现手自动切换,需要自动指令;为了安全,需要偏差报警等等。这些可以暂不考虑。为了思考的方便,咱们只要记住这三个量:设定值、被调量、输出指令。
事实上,为了描述方便,大家习惯上更精简为两个量:输入偏差和输出指令。输入偏差是被调量和设定值之间的差值,这就不用罗嗦了吧?
回到刚才的提问:什么是PID?
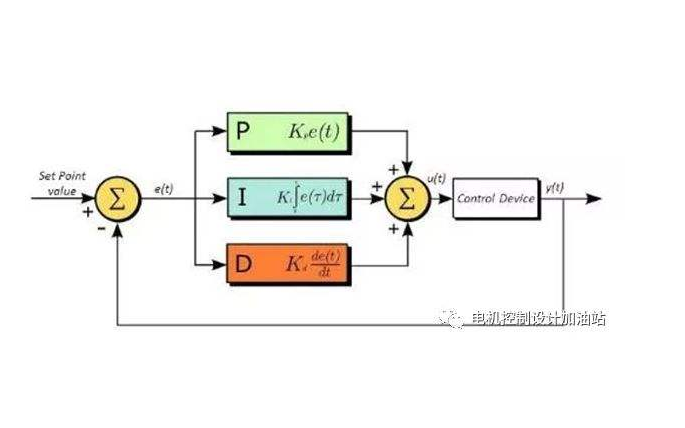
P就是比例,就是输入偏差乘以一个系数;
I就是积分,就是对输入偏差进行积分运算;
D就是微分,对输入偏差进行微分运算。
就这么简单。很多年后,我还始终认为:这个理论真美!
这个方法的发明人似乎是尼可尔斯(Nichols)。我手头没有更多资料,不能确定是不是尼可尔斯发明的。可是PID参数的整定方法确实是他做的。
其实这个方法已经被广大系统维护者所采用,浅白一点说,就是先把系统调为纯比例作用,然后增强比例作用让系统震荡,记录下比例作用和震荡周期,然后这个比例作用乘以0.6,积分作用适当延长。虽然本文的初衷是力图避免繁琐的计算公式,而用门外汉都能看懂的语言来叙述工程问题,可是对于最基本的公式还要涉及以下的,况且这个公式也很简单,感兴趣的看一下,不感兴趣的可以不看哈。公式表达如下:
Kp=0.6*Km
Kd=Kp*π/4*ω
Ki=Kp*ω/π
Kp为比例控制参数
Kd为微分控制参数
Ki为积分控制参数
Km为系统开始振荡时的比例值;
ω为极坐标下振荡时的频率
这个方法只是提供一个大致的思路,具体情况要复杂得多。比如一个水位调节系统,微分作用可以取消,积分作用根据情况再调节;还有的系统超出常人的理解,某些参数可以设置得非常大或者非常小。具体调节方法咱们后面会专门介绍。微分和积分对系统的影响状况后面也会专门分析。
几个基本感念
单回路:就是指有一个PID的调节系统。
串级:一个PID不够用怎么办?把两个PID串接起来,形成一个串级调节系统。又叫双回路调节系统。在第三章里面,咱们还会更详细的讲解串级调节系统。在此先不作过多介绍。
正作用:比方说一个水池有一个进水口和一个出水口,进水量固定不变,依靠调节出水口的水量调节水池水位。那么水位如果高了,就需要调节出水量增大,对于PID调节器来说,输出随着被调量增高而增高,降低而降低的作用,叫做正作用。
负作用:还是这个水池,我们把出水量固定不变,而依靠调节进水量来调节水池水位。那么如果水池水位增高,就需要关小进水量。对于PID调节器来说,输出随着被调量的增高而降低的作用叫做负作用。
动态偏差:在调节过程中,被调量和设定值之间的偏差随时改变,任意时刻两者之间的偏差叫做动态偏差。简称动差。
静态偏差:调解趋于稳定之后,被调量和设定值之间还存在的偏差叫做静态偏差。简称静差。
回调:调节器调节作用显现,使得被调量开始由上升变为下降,或者由下降变为上升。
PID整定中的P
所谓的P,就是比例作用,就是把调节器的输入偏差乘以一个系数,作为调节器的输出。
温习一下:调节器的输入偏差就是被调量减去设定值的差值。
一般来说,设定值不会经常改变,那就是说:当设定值不变的时候,调节器的输出只与被调量的波动有关。那么我们可以基本上得出如下一个概念性公式:
输出波动=被调量波动*比例增益
注意,这只是一个概念性公式,而不是真正的计算公式。咱们弄个概念性公式的目的在于:像你我这样的聪明人,不屑于把精力用在考证那些繁琐的公式上面,我们关注什么呢?我们关注的是公式内部的深层含义。呵呵。我们就来努力挖掘它的深层含义。
通过概念性公式,我们可以得到如下结论,对于一个单回路调节系统,单纯的比例作用下:
输出的波形与被调量的波形完全相似。
纯比例作用的曲线判断其实就这么一个标准。一句话简述:被调量变化多少,输出乘以比例系数的积就变化多少。或者说:被调量与输出的波形完全相似
为了让大家更深刻理解这个标准,咱们弄几个输出曲线和被调量曲线的推论:
1、对于正作用的调节系统,顶点、谷底均发生在同一时刻。
2、对于负作用的调节系统,被调量的顶点就是输出的谷底,谷底就是输出的顶点。
3、对于正作用的调节系统,被调量的曲线上升,输出曲线就上升;被调量曲线下降,输出曲线就下降。两者趋势完全一样。
4、对于负作用的调节系统,被调量曲线和输出曲线相对。
5、波动周期完全一致。
5、只要被调量变化,输出就变化;被调量不变化,不管静态偏差有多大,输出也不会变化。
上面5条推论很重要,请大家牢牢记住。记住不记住其实没有关系,只要你能把它溶化在你的思想里也行。
溶化了么?那我出个思考题:
1、被调量回调的时候,输出必然回调么?
2、被调量不动,设定值改变,输出怎么办?
3、存在单纯的比例调节系统么?
4、纯比例调节系统会消除静差么?
第一条回答:是。
第二条回答:相当于被调量朝相反方向改变。你想啊,调节器的输出等于输入偏差乘以一个系数,设定值改变就相当于设定值不变被调量突变。对吧?
第三条回答:是。在电脑出现之前,还没有DCS,也没有集中控制系统。为了节省空间和金钱,对于一些最简单的有自平衡能力的调节系统,比如水池水位,就用一个单纯的比例调节系统完成调节。
第四条回答:否。单纯的比例调节系统可以让系统稳定,可是他没有办法消除静态偏差。那么怎么才能消除静态偏差呢?依靠积分调节作用。
PID中的I
I就是积分作用。
一句话简述:如果调节器的输如偏差不等于零,就让调节器的输出按照一定的速度一直朝一个方向累加下去。
积分相当于一个斜率发生器。启动这个发生器的前提是调节器的输如偏差不等于零,斜率的大小与两个参数有关:输入偏差的大小、积分时间。
在许多调节系统中,规定单纯的比例作用是不存在的。它必须要和比例作用配合在一起使用才有意义。我不知道是不是所有的系统都有这么一个规定,之所以说是个规定,是因为,从原理上讲,纯积分作用可以存在,但是很可能没有实用意义。这里不作过分的空想和假设。为了分析方便,咱们把积分作用剥离开来,对其作单纯的分析。
那么单纯积分作用的特性总结如下:
1、 输出的升降与被调量的升降无关,与输入偏差的正负有关。
2、 输出的升降与被调量的大小无关。
3、 输出的斜率与被调量的大小有关。
4、 被调量不管怎么变化,输出始终不会出现节跃扰动。
5、 被调量达到顶点的时候,输出的变化趋势不变,速率开始减缓。
6、 输出曲线达到顶点的时候,必然是输入偏差等于零的时候。
PID中的D
D就是微分作用。单纯的微分作用是不存在的。同积分作用一样,我们之所以要把微分作用单独隔离开来讲,就是为了理解的方便。
一句话简述:被调量不动,输出不动;被调量一动,输出马上跳。
根据微分作用的特点,咱们可以得出如下曲线的推论:
1、 微分作用与被调量的大小无关,与被调量的变化速率有关;
2、 与被调量的正负无关,与被调量的变化趋势有关;
3、 如果被调量有一个,就相当于输入变化的速度无穷大,那么输出会直接到最小或者最大;
4、 微分参数有的是一个,用微分时间表示。有的分为两个:微分增益和微分时间。微分增益 表示输出波动的幅度,搏动后还要输出回归,微分时间表示回归的快慢。见图4,KD是微分增益,TD是微分时间。
5、 由第4条得出推论:波动调节之后,输出还会自动拐回头。
比例作用:输出与输入曲线相似。
积分作用:只要输入有偏差输出就变化。
微分作用:输入有抖动输出才变化,且会猛变化。
比例积分作用,就是在被调量波动的时候,纯比例和纯积分作用的叠加,简单的叠加。
我们在整定系统的时候,要有这么一个观念:比例积分微分三个参数的大小都不是绝对的,都是相对的。切不可以为我发现一个参数比较合适,就把这个参数固定死,不管别的参数怎么变化,永远不动前面固定的参数。这样的整定是机械的整定,要不得的。我们要在多个参数之间反复权衡,既要把握原则性,又要学会灵活性。
PID参数整定的质量指标
教科书里说的指标早就忘了,相关规定里面说的指标也没工夫细看。根据我的经验,这几个指标需要重视:
1、衰减率:大约为0.75最好。好的自动调节系统,用俗话说“一大一小两个波”最好。用数学方法表示出来,就是合适的衰减率。
2、最大偏差:一个扰动来临之后,经过调节,系统稳定后,被调量与设定值的最大偏差。一个整定好的稳定的调节系统,一般第一个波动最大,因为“一大一小两个波”,后面就趋于稳定了。如果不能趋于稳定,也就是说不是稳态,那就谈不上调节质量,也就无所谓最大偏差了。
3、波动范围:顾名思义,没必要多说。实际运行中的调节系统,扰动因素是不断存在的,因而被调量是不断波动着的,所以波动范围基本要达到一个区间。
4、执行机构动作次数:动作次数决定了执行机构的寿命。这里说的执行机构不光包括执行器,还包括调节阀门。执行机构频繁动作不光损坏执行器,还会让阀门线性恶化。下一节会更加详细的予以说明。
5、稳定时间:阶跃扰动后,被调量回到稳态所需要的时间。稳定时间决定了系统抑制干扰偶的速度。
整定系统需要注意的几个问题
1、执行机构动作次数
执行机构动作次数不能过频,过频则容易烧坏电机。动作次数与比例积分微分作用都有关系。一般来说,合适的比例带使得系统波动较小,调节器的输出波动也就小,执行器波动也少;积分的章节已经说过:如果输入偏差不为零,积分作用就会让输出一直向一个方向积下去。积分过强的话,会让执行器一次只动作一点,但是频繁地一点点向一个方向动作;微分作用会让执行器反复波动。
一般来说,国产DKJ系列的执行器的电机耐堵转特性较好,其它性能不一。电机在刚得电动作的时候,电流大约是正常运转电流的5-10倍。电机频繁动作很容易升温,从而烧坏电机。另外对执行机构的传动部件也有较大磨损。
一般来说,不管对于直行程还是角行程,对于国产还是进口,对于智能还是简单的执行器,动作次数不大于10次/分钟。对于一些进口执行器,尤其是日本的,次数还要减少。
对于执行机构是变频调节的(这里是说纯变频调节,而不是指执行机构采用变频电机),可以让参数快点,因为变频器始终处于运行状态。需要注意的是,变频器转速线性不能太陡,否则变频器输出电流大幅度变化,影响变频寿命。
2、PID死区问题
为了减少执行器动作次数,一般都对PID调节器设置个死区。在±死区内,都认为输入偏差为0。当超过死区后,输入偏差才从0开始计算。死区可以有效减少执行器的动作次数。但是死区过大的话又带来了新的问题:调节精度降低,对于一般的调节系统,不要求调节精度过高,精度高意义也不大。
提高死区降低精度的同时,也会降低调节系统稳定性。因为它造成了调节滞后。这一点不大容易被人理解。
3、 裕度问题
调节系统要有一个合适的调节裕度。如果执行机构经常处于关闭或者开满状态,那么调节裕度就很小,调节质量就受到影响。一般来说——都无数个“一般来说”了,谁让现场情况复杂,咱们不能把话说绝了呢——阀门在80%以上,流量已经达到最大,所以执行机构经常开度在80%也可以说裕度减小了。
这里所说的阀门,包括了各种调节工质流量的机构,包括阀门、泵的调速部分等。在第三章中,咱们专门要说一下执行机构的种类。
4、 通流量问题
调节阀门的孔径都是经过严格计算的。不过也存在计算失误的时候。通流量过大,执行机构稍微动作一点就可能发生超调;反之执行机构大幅度动作还不能抑制干扰。所以这个问题也是个重要问题。如果通流量不合适,有些系统甚至不可能稳定运行。
5、 空行程问题
在一定的开度内,调节器输出有变化,执行器也动作了,可是阀门流量没变化,这属于空行程问题。空行程有是执行其产生的,也有法门产生的。一般的机构都存在这个问题。空行程一般都比较小,可以忽略。可是如果过大,就不得不要重视这个问题了。
解决空行程的办法有很多,一般都在DCS内完成。当然,如果执行器和阀门能够解决的,要以硬件解决为主。
6、 线性问题
一般来说阀门开度与流量的关系都成平滑的线性关系。如果阀门使用时间长,或者阀门受到损伤,线性就会改变。线性问题可以有多种解决办法,既有参数整定的,也有控制策略的。当然最根本的解决办法在于对线性恶化的治理。如果是比较贵重的调速泵线性恶化,难以治理更换,那只好从调节系统寻找解决办法了。
还有个在火电厂中普遍存在的问题:减温水调节阀的线性恶化。这基本上是个顽疾。因为减温水调节阀动作频繁,经常在完全关闭和打开之间反复波动,相当多的电厂减温水阀门线性都很不好,而且还伴随着空行程偏大。两个问题加起来,给自动调节带来很大的困难。
7、 耦合问题
一个调节系统或者执行机构的调节,对另一个系统产生干扰互相干扰,或者是两个调节系统间互为干扰,产生直接耦合。解耦的办法是先整定主动干扰的调节系统,再整定被动系统。也可以在主动干扰的输出乘以一个系数,作为被动干扰的前馈。
还有一种间接耦合。这个现象在协调控制中比较明显:负荷与汽压的关系是互为耦合。解决问题的办法有两种:一种是互为修正前馈,这个解决办法的应用比较普遍,效果不是太好;更有效的办法是整定参数,效果要比前者优越得多,抗干扰能力也很大,可惜擅长此道的人太少。
整定参数的几个认识误区
1、对微分的认识误区
认为微分就是超前调节,如果被调量或者测量值有滞后,就要加微分。微分是有超前调节的功能,但是微分作用有些地方不能用:测量值存在不间断的微小波动的时候。尤其是水位、气压测量,波动始终存在,我们一直在考虑滤波呢,再加个微分,就会造成调节干扰。不如不要微分。
2、对积分的认识误区
有些人发现偏差就要调积分,偏差存在有可能是系统调节缓慢,比例作用也有可能影响,如果积分作用盖过了比例作用,那么这个系统就很难稳定。咱们上面说过:初学者容易强调积分作用,熟练者容易忽略积分作用。不再赘述。
3、对耦合系统中,超前调节的认识误区
对于耦合系统,不管初学者熟练者都容易考虑一个捷径:增加前馈调节。这个问题甚至搞自动控制的老手都容易犯,毕竟捷径谁都想走。比如众所周知的协调控制,经典控制法中,就有负荷和汽压互为前馈的控制策略设计。这个方法也不为错,但是更普适更好的方法是一种整定参数的思想,参数设置合理的话这个前馈画蛇添足。要积极探讨各种控制办法。
4、反馈过强
复杂调节系统中,前馈信号和反馈信号过强的话,会造成系统震荡,所以调解过程中不仅仅要注意PID参数,还要注意反馈参数。
尤其在汽包水位三冲量调节系统中,蒸汽流量和给水流量的信号都要经过系数处理。有些未经处理的系统,在负荷波动的时候,就要退掉自动,否则会发生震荡的危险。
5、死搬标准,强调个别指标
教科书里,自动调节系统需要关注的指标有很多。这些指标都有助于自动调节系统的整定。但是自动好不好,不要硬套指标。最应关注的有两个指标:被调量波动范围、执行机构动作次数,其他都不是最必要的。
曾经有一次,我帮助一个电厂整定自动调节系统。快要结束的时候,对方专工说:按照国家制定的自动调节系统调试标准,在多大干扰的情况下,系统恢复稳定的时间要小于若干分钟。我说按照这个标准,调节系统可能会发生震荡。对方说震荡没关系,只要能达到国家标准就可以。我重新整定系统后完全可以达到这个标准,可是再强调系统存在震荡的可能——大干扰情况下难以稳定——半个月后,这个参数下,该执行器烧坏。
6、改变设定值以抑制超调
频繁改变设定值是干扰自动调节。尤其减温水系统,没有必要依靠改变设定值来抑制超调。那么什么情况下,需要人为干扰呢?
在系统输出长时间最大或者最小的时候,说明达到了积分饱和,需要退出系统,然后再投即可。频繁改变设定值是干扰自动调节
7、主调快还是副调快?
因系统而定,因参数而定。常规参数:主调的比例弱,积分强,以消除静差;副调的比例强,积分弱,以消除干扰。不绝对。
审核编辑:刘清
-
PID控制
+关注
关注
11文章
465浏览量
42626 -
调节器
+关注
关注
5文章
916浏览量
49631 -
伺服放大器
+关注
关注
3文章
43浏览量
14600 -
AGC系统
+关注
关注
0文章
4浏览量
6383
原文标题:知识‖PID调节那些事!
文章出处:【微信号:仪表之家,微信公众号:仪表之家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
PID调节器的PID与PLC的PID异同及特点
matlab里的pid参数调节,pid调节的方法 精选资料推荐
模拟PID调节器的设计
PID调节到底是什么?PID调节和PID控制原理的详细资料说明
PID调节器的开环和闭环校验




评论