 无人机通信系统知识点总结
无人机通信系统知识点总结

一、信号频段
5.8G:该频段暂时是航拍领域使用最广泛的无线微波视频传输器。
优点:体积轻盈,低热量,距离远,并且价位很透明,频道最大可释放出32个可选。至今仍是航拍微波传图领域的首选。工信部信号限制当中,5.8G微波信号是消费级开放频段,也就是无论你是否经过许可,都可以用5.8G信号作为你航拍器的传图作业。在画质的处理上,优秀的5.8G视频传输器能够完全释放出64位模拟色彩度输出。并且部分厂家对5.8G这个频段在环境污染、辐射人体、干扰其他无线设施测试中,得到了影响最低的评分。
缺点:波长问题导致该信号穿透力极差,易受外界因素干扰。航拍的陆对空条件反而造就了绝对空旷的环境,因此工信部首先开放的就是5.8G允许在消费级产品使用。5.8G没有很夸张的功率,实际功率基本上≤2W。
2.4G:该频段应用最广泛的领域是日常家用电器,其主要用途是陆地工业无线监控工程。
优点:及其廉价,频点容易把控,最大可释放出12个频道。2.4G无线视频传输器应用最多的还是解决陆对陆无线监控问题。可让监控摄像机短程无线传输信号,发射器模块上的电子元器体积大,间隔距离较远,散热效果最好,适合长时间超负荷作业。波长略胜与5.8G有较好的穿透力和图像稳定性。功率甚至可以通过信号放大器、信号增益模块释放出20瓦以上的功率。
缺点:还是廉价的问题,导致儿童遥控玩具、电视机遥控器、路由器等日常用品都会采用该频段,使用此类发射器特别容易被干扰,也就是传出来的画面会有大雪花点、断频、串频等情况。容易受温差漂移干扰,也就是水蒸气上升时能看到的扭曲背景。廉价产品不用说采用的电子元器件都是最原始的,不像5.8G和1.2G主要采用贴片和模块式电子元件。并且2.4G信号段的视频传输器在市场上很少有实际标注功率的产品,用几百毫瓦的模块换一个大壳子就号称是8瓦或十瓦大功率。因此,好多使用者会发现一个2.4G 8W的大功率传图竟然不如一个5.8G 600mw的发射器距离远。据我所知2.4G的视频传图模块还没有正规厂家生产,仅有几个正规厂家生产监控工业级的设备,厂家也不是特别有实力。同时工信部对2.4G还是有管制的,只是限制了2.4G内的某几个频道。
1.2G:属于低频信号,穿透力极强,可覆盖所有对无线视频传输的领域。
优点:波频最连贯,大多传输器都可处理主、辅两种波频,高于2.4G的信号传输相当于再海面或浅水游泳,低于1.5G的相当于在海底,海面上再大的惊涛骇浪,海底仍然平静。已知市面上模块最大功率可达到8W,传图的图像也可处理64位乃至更高的画质,发射器本身体积也极其微小,可无限延伸设备功能。大多1.2G信号的发射器都不受温差相位漂移的影响,也是微波无线视频传输器里最适合陆对陆传输的。比较知名的发射器品牌如:台湾罗美、深圳栢通等,其中台湾罗美1.2G是全球航拍玩家家喻户晓的,除了台湾罗美以外再无任何无线微波视频传输器能够处理出≥64位的色彩。在外国航拍玩家中,有相当一部分玩家在增益达到的情况下将罗美1W视频传输器打出25~30公里的超长距离。深圳栢通也以最廉价的1.2G颇受老外们的认可,1.2G超强的穿透力也是陆对陆的首选。
缺点:1.2G是工信部最早严令禁止空中使用的频段,但不包括经过许可的民用级产品。在国内1.2G信号段仍服役与军方和政府机构,同时也因为1.2G过强的功率会导致周边无线设备失灵,因此1.2G并不能当作消费产品公开销售。因以上条件导致1.2G发射器价格较高,最贵可达到几千元。1.2G发射器普遍比其他频道的发射器温度高,也因1.2G内可释放频道少的缘故,很多不同厂家的发射器可以共用接收器,串频率也较高。
二、编码方式
PCM:脉冲编码调制,以约定好的二进制码流传递信息,可以时分复用(不同的制式时隙个数不同,在实际中使用的是两种对数形式的压缩特性:A律和U律,A律编码主要用于30/32路一次群系统,U律编码主要用于24路一次群系统。A律PCM用于欧洲和中国,U律PCM用于北美和日本)
PPM:脉冲位置调制,以不同时刻出现的脉冲位置传递信息,可以时分复用;
PWM:脉冲宽度调制,以脉冲占空比传递信息,不可以时分复用;PWM以及其变种SPWM广泛用于电机调频调速控制。
PPM和PCM都用于遥控设备无线传输上,PCM属于数字调制,需要利用高速AD和DA;PPM利用积分器和滤波器,属于模拟调制。
反应速度PPM快于PCM,PPM和PCM都是信号编码方式,可内建多路信号。PWM是脉冲宽度调制,也就是单通道的。发射机模式与接收机模式要一致才能对频。
无人机遥控要传输的必需信息包括油门,偏航,偏移与俯仰,可选信息包括对云台等信息的控制。PWM无法传输多路信号,无法应用在无线传输中。PPM由于易失真,因此,目前主流编码方式是采用PCM波形编码。还有SBUS,DSM等
后来由于视频信息传输的需求,商家会将图传与控制传输做到一套传输系统内。比如,DJI Lightbridg全高清数字图像传输系统,其内置了2.4G遥控链路,其高配方案实测有效传输距离高达5km,标配也达到了1.7Km。
三、无人机遥控指令加密方法
遥控信息的安全问题是无人机遥控系统设计和任务实施过程中最重要的问题之一。然而日益发展的电子侦察和电子对抗技术,使第三方可以截获已方所发送的遥控指令,分析和窃取遥控信息的内容,从而伪造遥控信息,对己方无人机构成严重威胁。随着现代通信技术和密码技术的发展,人们通常采取指令加密的方式使遥控指令获得更高的安全性和可靠性。为此我们设计了一种一次一密的序列密码加密方案,并结合加解密的流程采用不同的遥控帧结构,确保无人机遥控指令安全可靠地传输。
(一)无人机遥控的基本概念
所谓无人机的遥控就是在主控端(通常指地面控制站)将控制命令(飞行控制命令、任务控制命令)变换成指令,通过无线电上行信道发向无人机的相关机载遥控遥测设备。机载遥控遥测设备经过一系列变换及指令解码即得到开关指令或连续指令信号。这些信号送到无人机自动驾驶仪或任务执行机构,控制飞机飞行或者控制任务设备做相应动作。
1、遥控指令构成
遥控指令主要用于实现对无人机的控制,其构成直接取决于无人机飞行原理和控制方式。根据功能划分,遥控帧可分为实时开关命令帧和串行注入数据帧。在每帧中需要设定方式字,以便对帧的内容进行判定6遥控指令通常每隔100ms发送一帧,每帧32B,包括数据头定义、飞控指令、导航数据和效验字等。遥控指令的格式如图1所示。
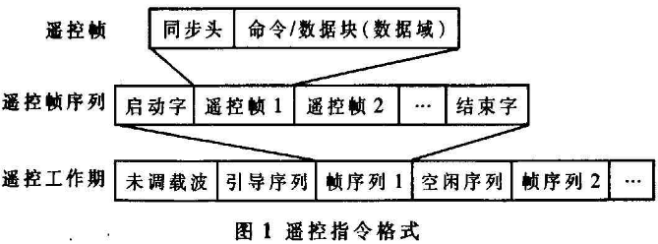
上行遥控信道开启一次为一个遥控工作期。在每个遥控工作期的开头有一个引导序列,使无人机上载波、副载波解调器进入稳定和同步状态口如果在一个遥控工作期内间歇发送若干个遥控帧或遥控帧序列,则需要在间歇期间用空闲序列填充,以维持必要的同步。
2、遥控指令特点
遥控指令的数据量很小,通常12.8kb/s的传输速率就可满足要求,其具有以下特点:
(1)实时性好。地面控制站通过遥控指令直接控制无人机的飞行姿态,所以指令延迟不允许太长。
(2)可靠性高。无人机的飞行控制主要依靠遥控指令,对指令产生、发送、传输和接收的可靠性要求非常高。
(3)抗干扰性好。为了避免和减少由漏指令、误指令引起的无人机飞行事故,遥控指令要求具有较强的抗干扰能力。
(4)保密性高。为了确保无人机的控制规律和飞行航迹不被截获,对遥控指令的保密性要求较高。
(二)基于序列密码的遥控指令加密
在数据文件加密处理中最常用的方法有分组加密和序列加密。分组加密以块为单位对数据进行加密和解密,块的长度由算法设计人员设定,块最小长度由对密码强度的考虑来确定。序列加密时数据加解密的块长可以由用户自己确定,不要求最小块长,在极端情况下,可以逐位加密。
本文采用序列密码加密体制主要是基于以下几方面因素:
(1)二者都可以做到高强度保密,从实现上来看,分组密码较复杂,序列密码相对简单。
(2)分组加密体制对信息加密存在误码扩散和一定延时,一般应用于信道传输质量较好或具有数据重发功能的场合。
(3)序列密码加密体制对信号的低延时、无误码扩散等特点,更适合应用在误码率较高的无线链路中。
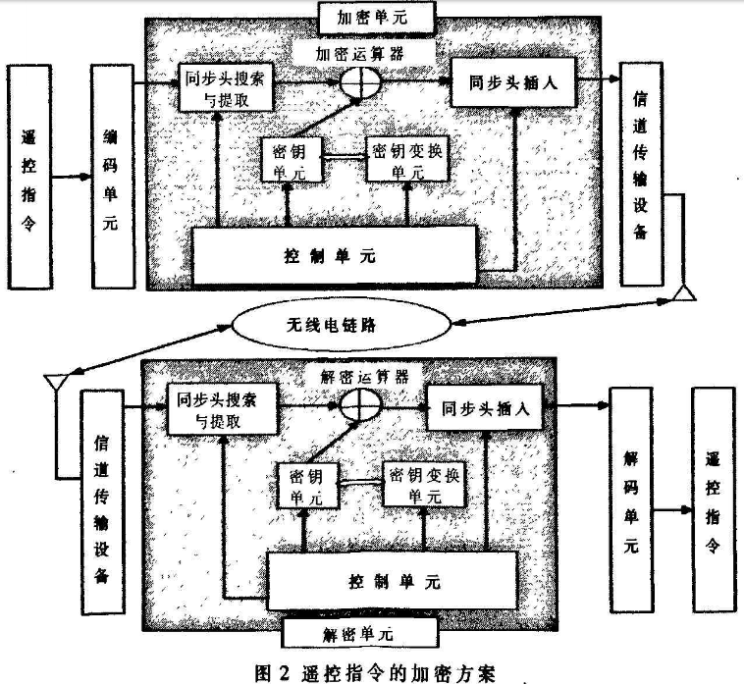
本文采用的是真随机序列作为初始密钥的一次一密的加密方案,如图2所示,由嵌入到通信链路中的加解密单元完成对遥控指令实施加解密操作。这种做法避免保密单元处理大量与通信相关的内容,提高信息处理的速率,确保遥控指令及时、可靠地传输。
1、密钥的产生、传送和储存
图2中密钥单元存储的是完成本次飞行任务所需的加密密钥。第一个加密密钥由基本密钥与会话密钥作用产生,其后的每个加密密钥由上一个加密密钥变换产生,此种做法可以避免保密单元存储大量的加解密密钥。图3为密钥产生的过程。
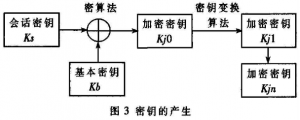
其中,基本密钥Kb由地面站与机载共同拥有。加密单元的基本密钥由密钥IC卡注入到Flash存储模块中,解密单元的基本密钥由地面站辅助注钥设备注入到机载Flash存储模块中。基本密钥由两部分组成,其中一部分用于对密钥变换单元存储的密算法进行解密,另一部分则与会话密钥作用产生加密密钥。会话密钥Ks是一组真随机序列,通过基于电阻热噪声的真随机序列产生器中提取,它在理论上是不可破译的。其随机序列发生器的基本结构如图4所示。
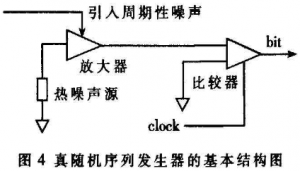
加密单元每次上电重新启动后,真随机序列产生器都会得到一组不同的真随机序列,经提取后得到此次通信的会话密钥Ks,地面站将会话密钥Ks发至解密单元相应存储模块后,机载解密单元将Ks与自己的基本密钥作用生成与地面站完全相同的初始密钥。这时,密钥变换器按照同样的时钟工作开始,保证加密密钥与解密密钥的一致。
2、加密解密流程及其帧结构的设计
结合上文遥控指令的构成方式及其加密、解密密的需要,本文设计的遥控指令帧结构如图5所示。

同步头都是选择自相关特性好、并且在密文数字序列中出现概率较小的码型,这样有利于在接收端进行同步检测,并防止在信息流中频繁出现与同步头相同的码型,造成接收端的虚假同步。同时还要防止信道误码对同步头干扰造成漏同步的情况发生,因此,必须对同步头的传输采用容错技术或前向纠错技术的处理,以确保接收端能够正确判别出同步头信号。在本设计中,同步头选择IRIG(lnter-Range Instrumentation Group)推荐的最佳16位码EB90;方式字、开关命令或注入数据、系统备用部分及校验和需要进行加密处理,共需24B的密钥,即密钥单元中的每组密钥为192bit。
以下将结合遥控指令的加密过程详细阐述不同场合下使用的不同遥控帧结构。
无人机通信过程包括了两个环境:地面站相对安全的环境和飞行区域安全威胁较大的环境。各通信终端设备在地面站内完成保密单元初始化,在开始保密通信前,无人机与地面站之间进行相互认证,由地面站发起。
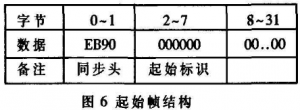
起始帧用于表示保密通信的开始,机载解密单元无论何时接收到该帧,都要进行解密单元的重新初始化,并将该帧回传至地面站,以通知地面站机载设备已准备就绪。起始帧结构如图6所示。
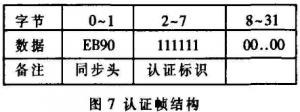
认证握手帧用于数据交互前的相互认证,同样以互发认证帧的形式实现a认证帧结构如图7。
(1)加密单元工作流程
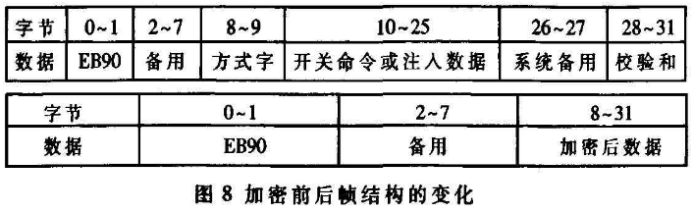
当机载单元通过遥测信道回传地面站正确的应答后,地面站加密单元进入工作状态。首先进行同步头的搜索,当连续搜索到尼个(用户可设定)同步头时,电路进入锁定状态,控制单元提取遥控帧中8~31字节的数据送至加密运算器1号缓存-同时读取密钥单元192bit加密密钥送至加密运算器2号缓存和密钥变换单元,加密运算器分别读取两个缓存数据完成加密(算法已初始化);密钥变换单元在密算法的作用下生成下一帧的加密密钥(加密密钥的生成时间小于一帧遥控帧的加密时间)。最后由控制单元完成对遥控帧的组合。图8为加密前后帧结构的变化。
(2)解密单元工作流程
解密单元同样首先进行同步头的搜索,进入电路锁定状态后,控制单元首先提取判断2—7字节是否为全0或全1数据,若不是则提取帧中的8~31字节数据送至解密运算器的2号缓存,同时将密钥单元中储存的192bit解密密钥输出到解密运算器1号缓存和密钥变换单元,解密运算器提取1、2号缓存数据完成解密;密钥变换单元在解密遥控帧的时间内完成对下一次通信解密密钥的生成并将其储存于密钥单元。
3、密码同步方案
密码同步技术是基于序列密码加密的数字通信系统中非常重要的技术,目的是为了在通信过程中,保证通信双方加解密的起点严格一致。
密码同步工作状态的建立一般是在保密设备首先建立位同步的情况下进行,位同步可以由信源终端或信道设备直接提供的时钟来实现,也可以通过从信源终端或信道传输设备提供的数字流中提取时钟来实现A选择信源终端提供的时钟还是选择信道传输设备提供的时钟,应服从数字通信系统的总体时钟同步关系的安排Q位同步的作用是指示比特的开始和结束,这里不作详细讨论。
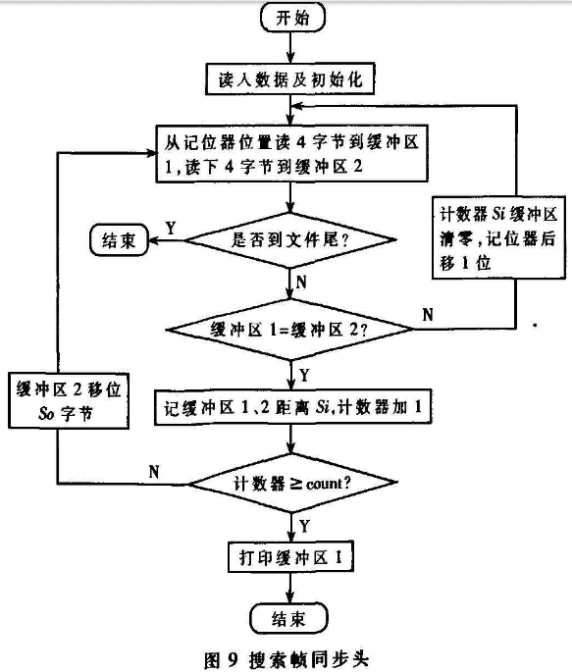
在本设计中,密钥变换器在统一的时钟驱动下工作,利用这种方式可以保证只要系统实现了正确的帧同步,即对同步头的正确搜索,则密码同步也同时实现。同步头的搜索过程如图9所示。
在数据流存在误码(由噪声或干扰引起)的情况下,通过某些抗误码算法正确地找到并保持每一帧的开始位置,这就是锁定帧同步过程。只有正确锁定帧同步后,才可以在每一帧里正确地分析帧的结构。锁定帧同步步骤如下:
(1)搜索阶段:用数据流和帧同步码进行相关运算的方法在数据流中搜索帧同步码。数据流向左移位,每次移1位后与帧同步码模板比较一次。当数据流中的帧同步码与帧同步码模板位置重合、且由误码率引起的误码数目不超过口时,认为搜索到帧同步码。
(2)验证阶段:找到帧同步码后,以一帧为周期,验证是否在连续若干帧中周期性地出现同步码。
(3)假定以上两个阶段共进行G帧,其中搜索和证帧码时容错数均为a(允许有a位码与帧码不符,a≤n)。如果连续G帧都找到了帧同步码,这时进入帧同步锁定阶段,可以对遥控指令进行处理,但是每一帧仍然要周期性地检查帧同步码,这时容错数为k(k≤n),当连续L帧都未发现帧同步码时,帧同步解锁,停止处理数据,重新进入搜索阶段。这样处理,可以保证在出现假锁(指把数据码误认作帧同步码而锁定假帧同步)或遥控指令流终止时能及时退出锁定状态,防止继续对虚假遥控指令进行处理。
审核编辑:汤梓红
-
发射器
+关注
关注
7文章
920浏览量
55439 -
PWM
+关注
关注
116文章
5894浏览量
226667 -
通信系统
+关注
关注
6文章
1286浏览量
55234 -
无人机
+关注
关注
237文章
11390浏览量
196728 -
微波信号
+关注
关注
0文章
48浏览量
7878
原文标题:无人机通信系统知识点总结
文章出处:【微信号:雨飞工作室,微信公众号:雨飞工作室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录




评论