 大象机器人开源六轴机械臂myCobot 320全息投影
大象机器人开源六轴机械臂myCobot 320全息投影

是不是觉得这个展示会比较新颖,神奇呢?其实这是一项技术,叫做全息投影。全息技术已经成为我们生活中的一部分,它的应用已经涵盖了多个领域。在娱乐领域,我们可以在电影院、游戏厅和主题公园等地方看到全息技术的应用,通过全息投影技术,观众可以享受到更加逼真的视觉效果,进一步提高了娱乐体验。在医疗领域,全息技术被广泛用于医学诊断和手术中,通过呈现高分辨率的三维影像,医生可以更加精准地观察病情,提高了诊断和手术的效果。在教育领域,全息技术被用于制作教学资料和科普展示,帮助学生更好地理解和掌握知识。此外,全息技术还被应用于工程制造、安全监控、虚拟现实等领域,为我们的生活带来了更多的便利和创新。可以预见,随着技术的不断发展和应用场景的不断拓展,全息技术在未来的生活中会发挥更加重要的作用。
引言:
这篇文章主要内容是描述如何用myCobot320 M5Stack 2022 和 DSee-65X全息投影设备来实现裸眼3D的展示。
介绍
该项目是由大象机器人和DSeeLab Hologram 共同合作而成.
DSee-65X全息设备:
DSee-65X 是一家名为DSee Lab Hologram专做全息技术的公司的产品
DSee-65x:高分辨率、高亮度支持各种内容格式WiFi连接APP操作云端远程集群控制无限拼接大屏展示3万小时连续运转.
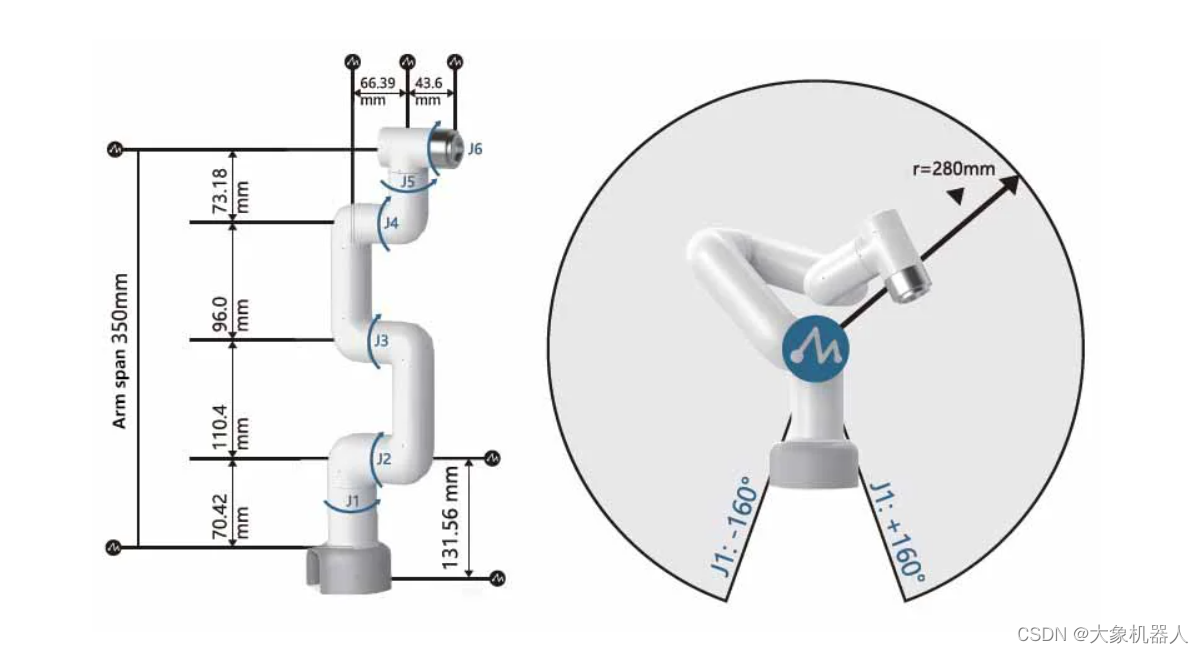
myCobot 320 M5Stack-Base 2022
myCobot 320 M5Stack-Base是myCobot280产品进阶版,主要适合创客及科研人员,能够根据用户的需求进行二次开发,实现用户个性化定制。整体精巧构思,all-in-one设计,具有易用性、安全性和经济性三大优势。myCobot 320本体重量3kg,负载1kg,工作半径350mm,体积相对小巧但功能强大, 操作简单、能与人协同、安全工作。
myCobot 320 2022 配置了丰富的接口,可以快速适配各种使用场景。
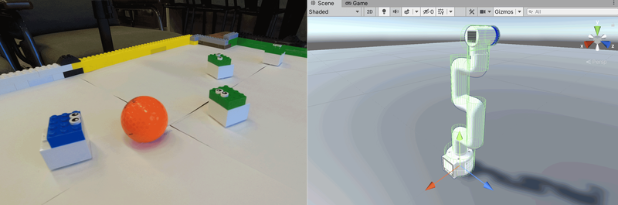
介绍完两个设备,接下来实现将全息设备跟机械臂像结合共同工作。
这个项目操作起来十分的简单,可以分为两个步骤,
1 将DSee-65X安装在myCobot 320 的末端
2 控制myCobot320 做一个优美得轨迹来展示全息影像
Project
安装
DSee-65X和myCobot320 M5Stack 2022是两个不同公司的产品,拿到手的时候发现我们并不能直接把全息设备给安装在myCobot320 末端,所以我们得需要对全息设备进行改造。

所以我们得需要对全息设备进行改造
下图是myCobot320 末端的结构
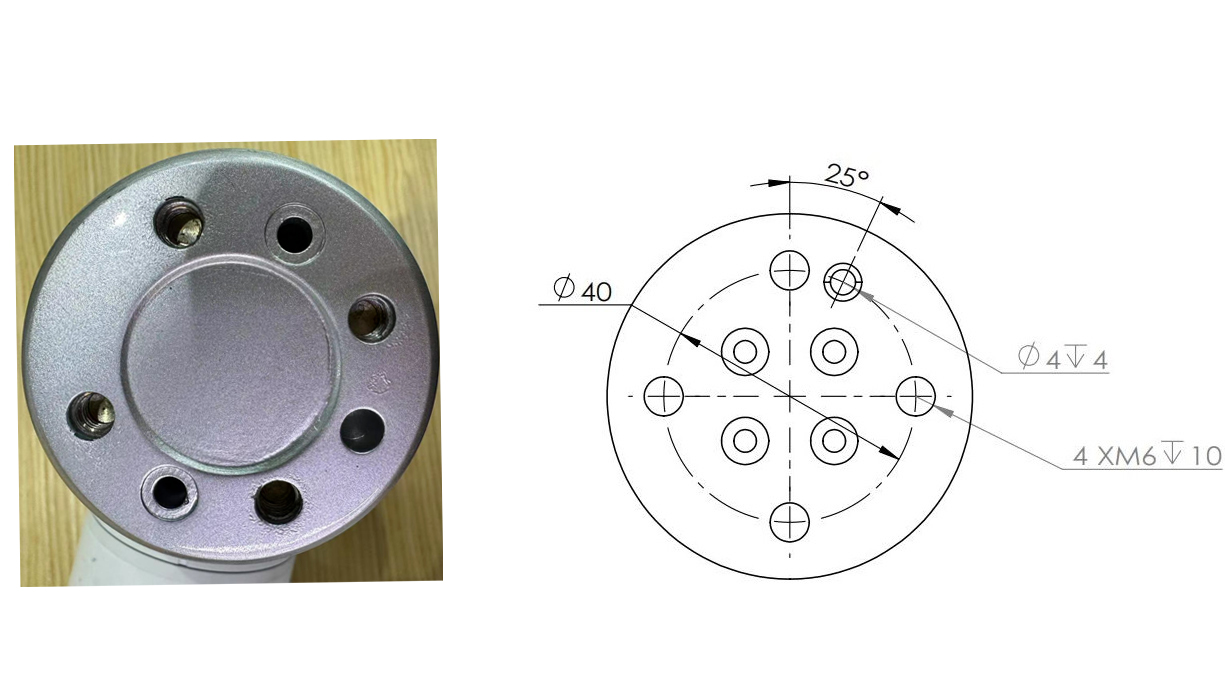
放一个全息的gif的图片
根据所提供的信息,我们加一块板子作为它们的中间桥梁来适配。
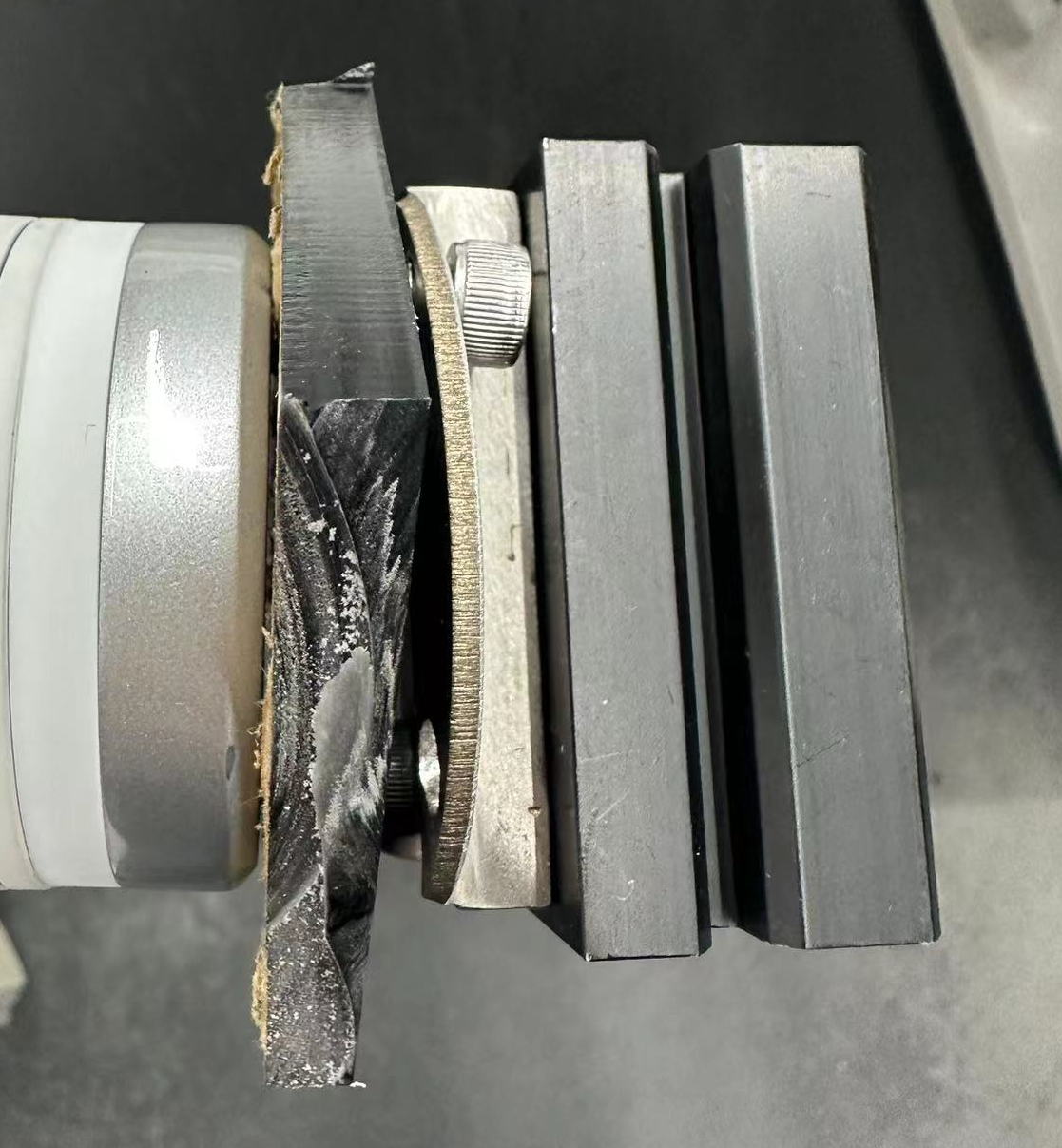
myCobot320的负载最大能够达到1kg,这点改装对它来说完全没问题。
控制机械臂
我们的目标是设计一套myCobot320机械臂运行的轨迹,这套轨迹需要保证不影响全息影响的观看。
myCobot 320 的接口丰富,支持Python,C++,C#,JavaScript,Arduino,ROS等。接下来来对它进行编程。这里我们使用的是一种很容易上手的方法。这个方法是用myBlockly软件去进行编程,myBlockly是一款图形编程软件,通过拖拽式的方式来进行编写代码。
下面图片中的代码是机械臂运动轨迹的图形代码。

myBlockly的底层代码是python编写的,所以我们也可以直接使用python代码来控制机械臂,下图是python的代码。
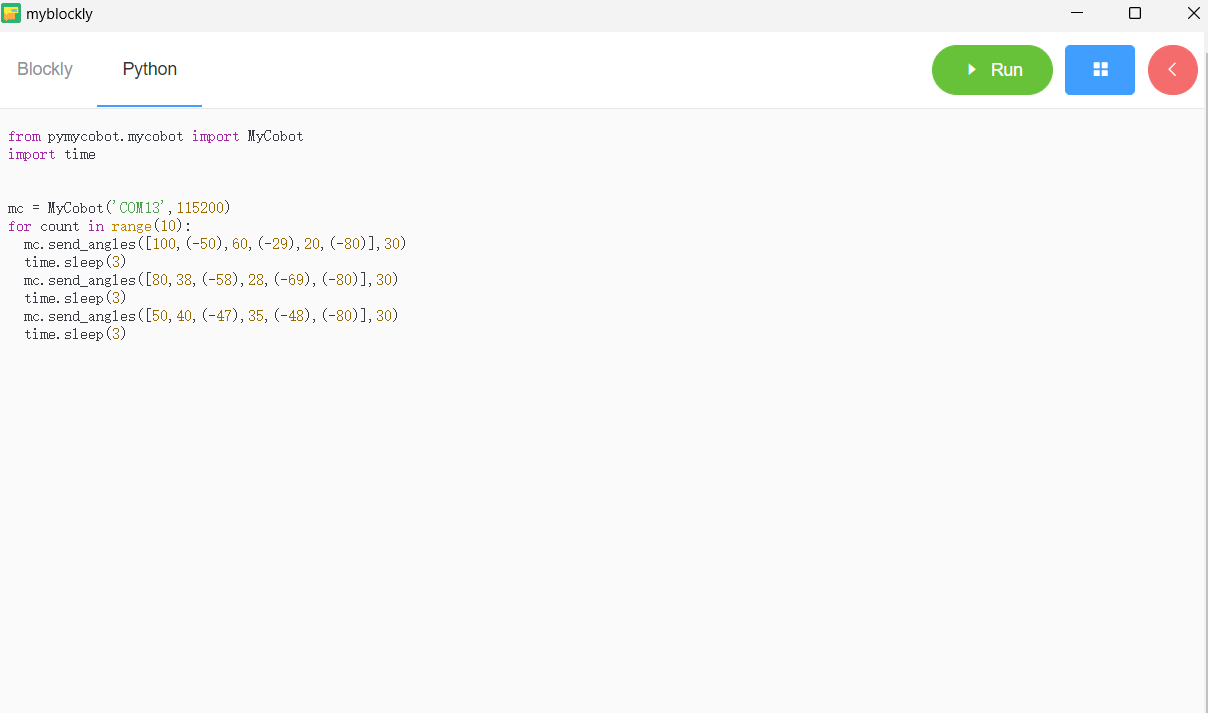
介绍代码功能
function: MyCobot('brand',port) create a object to use the pymycobot lib function: send_angles([angles],speed) Sending the angle of each joint to the robot arm to move at speed function: time.sleep(s) Delay by s seconds,then go to the next command line function: for count in range(c): Loop the following code c times
该代码的实现的内容:
每发送1个关节角度给机械臂去执行,就需要等待3s 然后再发送下一个关节角度给机械臂。一次循环共有三次运动控制,总共循环10次。
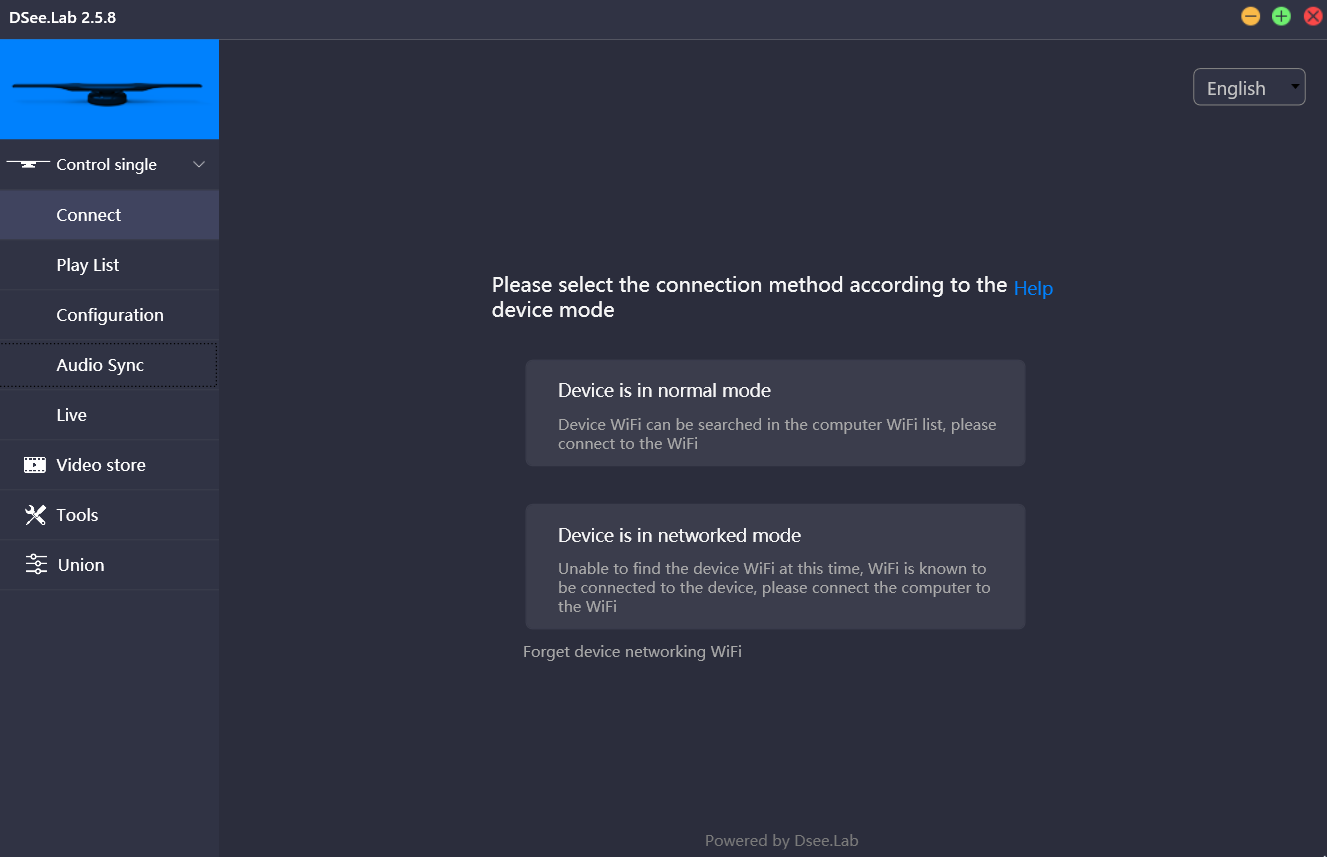
简单说明一下DSee-65X如何使用。
每个DSee设备都有专属的局域网,用电脑连接上同一个局域网就可以让全息设备启动了。
总结
整个流程下来看着只是机械臂充当一个支撑,展示着全息影像设备。我们可以想象丰富一些,通过使用全息投影技术,可以将三维模型或图像投射到空间中,然后利用传感器或摄像头等设备捕捉用户的动作或手势,实现对机械臂的控制。例如,在制造或物流行业,可以使用机械臂和全息技术相结合,实现更高效的生产和物流操作。在医疗行业,也可以利用机械臂和全息技术相结合,实现更加精准的手术和治疗。总之,机械臂和全息技术相结合可以为各种应用场景带来更加智能化、精准化的控制和操作方式,提高生产效率和工作质量。
这些都是需要喜欢创作的你来投入精力去开发!欢迎大家在下面留言,把你们的想法分享出来大家一起去讨论创作更加有趣的项目。
审核编辑黄宇
-
机器人
+关注
关注
213文章
30590浏览量
219628 -
全息投影
+关注
关注
5文章
85浏览量
20054 -
机械臂
+关注
关注
13文章
582浏览量
25968
发布评论请先 登录
结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)

大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
myCobot机械臂应用于Unity机器人编程实战课

myCobot Pro600六轴机械臂与3D深度视觉:物体精确识别抓取堆叠


大象机器人六轴协作机械臂myCobot 320 进行手势识别!

结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(上)
大象机器人myCobot 320六轴协作机械臂用户开箱!

大象机器人开源协作机械臂myCobot 630 全面升级!
大象机器人开源协作机械臂机械臂接入GPT4o大模型!

大象机器人×进迭时空联合发布全球首款RISC-V全栈开源小六轴机械臂

大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品






 工商网监
工商网监
评论