 浅析运动规划、路径规划、轨迹规划
浅析运动规划、路径规划、轨迹规划

来源:古月居
1. 运动规划
让我们从移动机器人运作的流程中来看待规划的作用
首先传感器接收外部物理信息(感知与数据融合)
然后将这些信息进行处理,一方面让机器人知道自己的位置(定位),一方面存储关于周围环境位置的信息(建图),SLAM(同时定位与建图)是最近比较火的一个研究热点
收集到足够的位置信息和地图信息后,就进入到了规划阶段,规划用来解决怎么走的问题,路径规划和轨迹规划统称为运动规划
运动规划完成后,就编写实际的控制程序,使机器人移动到目标位置了

移动机器人运作流程
2. 路径规划VS轨迹规划
2.1 路径&路径规划
路径是构型空间中连续的曲线(所谓构型空间就是机器人能到达的所有的点)[1],下图直观地展示了从c(0)到c(1)的一个路径.
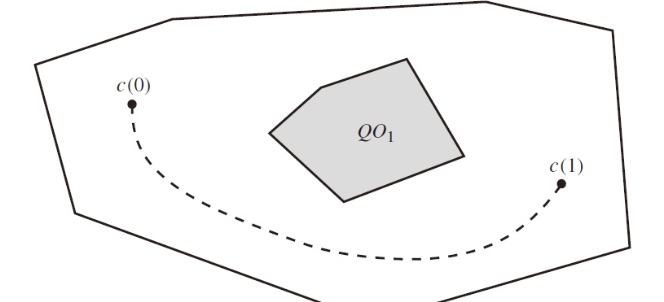
路径(图中虚线)
路径数学上用c(s)表示,具体含义如下.

所以路径规划,就是在已知几何约束(比如障碍物,地图等)情况下求解路径.
2.2 轨迹&轨迹规划
机器人移动过程中,控制器提供了用于跟踪的一系列目标位置和目标速度.机器人的位置/时间函数就叫做轨迹[2].对它分别进行一次/二次求导就可以得到机器人的速度/加速度信息.
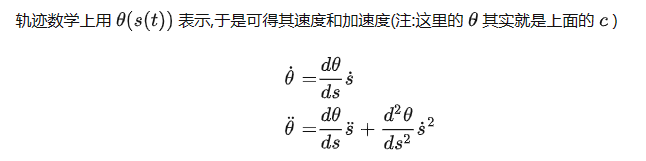
所以轨迹规划,就是在已知时间约束(限定多长时间到达)速度约束(速度最高能到多少)的情况下求解轨迹.其中路径可能已知,可能未知.
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55530浏览量
794016 -
机器人
+关注
关注
213文章
31464浏览量
223692 -
移动机器人
+关注
关注
2文章
820浏览量
34935 -
路径规划
+关注
关注
0文章
79浏览量
15703 -
轨迹规划
+关注
关注
0文章
3浏览量
5878
原文标题:浅析运动规划、路径规划、轨迹规划
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
运动控制速度规划
电机控制速度规划是运动控制的一大关键点。这里提供一个讨论话题的平台,大家可以在这里分享自己的心得!有啥关于速度好的想法,或者觉得有意思的资料可以发到这里,大家分享!
发表于 09-04 11:38
路径规划 人工势场
我现在在做机器人的路径规划,想用人工势场的算法,通过用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的
发表于 05-15 15:25
介绍一种永磁同步电机控制的轨迹规划方案
位置到目标位置的过渡过程进行轨迹规划,本文将介绍三次多项式速度轨迹,数学计算简单,速度曲线光滑连续,适合伺服电机轨迹规划。2.数学模型在伺服
发表于 10-12 14:51

机器人路径规划算法,全局路径规划与局部路径规划究竟有哪些区别
路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使机器人在运动过程中能安全
决策规划系列:运动规划常用算法
有了全局路径参考信息,有了局部环境信息了,有了行为决策模块输入的决策信息,下一步自然而然的就要进行运动规划,从而生成一条局部的更加具体的行驶轨迹,并且这条
自动驾驶之路径规划
从 周围车辆预测;轨迹初始化;避障优化轨迹 等角度介绍轨迹规划。 然而这些文章不够全面和系统,不免产生盲人摸象的感觉,这里结合百度Apollo较为系统和全面的介绍次
发表于 06-01 15:12
•0次下载

全局路径规划RRT算法原理
无人驾驶路径规划 众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。 路径规划是感知和控制之间的决策阶段,主要目的是考虑到车辆动力学、机动能力以及相应规则和道路边界条件下



评论